功能介绍
Autolabor Simulation Base 主要用于模拟差速转向的移动机器人底盘,其运作模式为订阅 ROS速度信息 ,根据底盘自身参数限制(这里主要限制因素有最大速度与最大加速度),以及设置的噪音参数模拟小车运行速度。并根据速度控制小车在X-Y平面中行驶。
小车在运行过程中会发布 ROS里程计信息 此处里程计数据中包含噪声,用于模拟真实情况下的里程计数据。
同时该模块会发布两个坐标转换信息
- 里程计坐标系 ——> 小车底盘坐标系 的坐标转换
- 小车底盘坐标系 ——> 真实坐标系 的坐标转换
note
在ROS中坐标转换树中,一个子节点最多只能有一个父节点。作为子节点 小车底盘坐标系 不能同时拥有两个坐标系(里程计坐标系,*真实坐标系),所以在坐标转换树中将真实坐标系* 作为 小车底盘坐标系 的子节点。
节点信息
订阅话题
话题名称:/cmd_vel
消息类型:geometry_msgs/Twist
话题说明:用于控制机器人地盘运动的速度指令
geometry_msgs/Twist 数据类型说明
geometry_msgs/Vector3 linear 线速度 单位为 m/s float64 x 前后移动的速度,+表示向前,-表示向后 float64 y 左右移动的速度,+表示向左,-表示向右 float64 z 上下移动的速度,+表示向上,-表示向下 geometry_msgs/Vector3 angular 角速度 单位为 rad/s float64 x 横滚角速度,正负号依据右手法则决定 float64 y 俯仰角速度,正负号依据右手法则决定 float64 z 航向角速度,俯视小车时,+表示逆时针旋转,-表示顺时针旋转小车使用差速转向,仅能前后运动,所以在 线速度 中只有 X分量 有数据,其余分量为0
小车在水平面行驶,仅能水平转动,所以在 角速度 中只有 Z分量 有数据,其余分量为0
发布话题
话题名称:/odom
消息类型:nav_msgs/Odometry
话题说明:发布机器人的轮速里程计信息(此处数据带有噪音)
nav_msgs/Odometry 数据类型说明
std_msgs/Header header 数据头信息 uint32 seq 数据序列号 time stamp 数据时间戳信息 string frame_id 姿态数据(pose)所处的坐标系 string child_frame_id 速度数据(twist)所在的坐标系 geometry_msgs/PoseWithCovariance pose geometry_msgs/Pose pose 里程计姿态数据信息 geometry_msgs/Point position 里程计姿态数据的位置信息 float64 x float64 y float64 z geometry_msgs/Quaternion orientation 里程计姿态数据的方向信息(四元数) float64 x float64 y float64 z float64 w float64[36] covariance 姿态数据的协方差矩阵(x, y, z, roll, pitch, yaw) geometry_msgs/TwistWithCovariance twist 里程计速度数据信息 geometry_msgs/Twist twist geometry_msgs/Vector3 linear 线速度信息 float64 x float64 y float64 z geometry_msgs/Vector3 angular 角速度信息 float64 x float64 y float64 z float64[36] covariance 速度信息的协方差矩阵(vx, vy, vz, v_roll, v_pitch, v_yaw)
节点参数
参数名称:~odom_frame
参数类型:string
默认数据:odom
参数说明:里程计坐标系的名称
参数名称:~base_link_frame
参数类型:string
默认数据:base_link
参数说明:小车坐标系的名称
参数名称:~real_map_frame
参数类型:string
默认数据:real_map
参数说明:真实坐标系的名称
参数名称:~noise_v_linear
参数类型:double
默认数据:0.0
参数限制:必须大于等于0
参数说明:模拟行驶过程中在线速度中添加白噪音的标准差,单位为m/s,默认为不添加噪音
参数名称:~noise_v_theta
参数类型:double
默认数据:0.0
参数限制:必须大于等于0
参数说明:模拟行驶过程中在角速度中添加白噪音的标准差,单位为rad/s,默认为不添加噪音
参数名称:~max_a_linear
参数类型:double
默认数据:999.0
参数限制:必须大于0
参数说明:小车底盘行驶最大线加速度,单位为 m/s^2, 默认是一个比较大的值,在正常模拟情况下。小车能直接达到所给的速度
参数名称:~max_a_theta
参数类型:double
默认数据:999.0
参数限制:必须大于0
参数说明:小车底盘行驶最大角加速度,单位为 rad/s^2, 默认是一个比较大的值,在正常模拟情况下。小车能直接达到所给的速度
参数名称:~max_v_linear
参数类型:double
默认数据:1.0
参数限制:必须大于0
参数说明:小车底盘行驶线速度绝对值的最大值,单位为 m/s,比如在默认情况下,小车行驶速度为 -1.0 m/s \leq v \leq 1.0 m/s, 当控制速度超出这个范围,小车按照离控制速度最近的极值运行
参数名称:~max_v_theta
参数类型:double
默认数据:1.57
参数限制:必须大于0
参数说明:小车底盘行驶角速度绝对值的最大值,单位为 rad/s,说明与 max_v_linear 类似
参数名称:~rate
参数类型:int
默认数据:30
参数限制:必须大于0
参数说明:小车模拟行驶更新位置的频率,也是里程计信息发布的频率,这个值越大,小车模拟行驶越平滑,同时需要计算量也就越大
使用示例
以下的实验步骤必须在安装好ROS环境以及编译Autolabor Simulation功能包的基础下进行,如果您还未执行上述操作,请先参考前面的使用文档。假设ROS工作目录为 ~/catkin_ws,并且Autolabor Simulation的源码放在 ~/catkin_ws/src 中,如果你的环境和上述不一致,需要在下面的脚本中做相应的替换。
进入ROS工作目录
cd ~/catkin_ws
编译模拟器(如果您已经编译过,可忽略此步)
catkin_make
添加模拟器相关环境变量
source devel/setup.bash
进入autolabor_simulation_base包的launch文件夹
roscd autolabor_simulation_base/launch
创建ROS脚本文件
echo '
' > demo_simulation_base.launch
执行刚才我们建立的ROS脚本
roslaunch autolabor_simulation_base demo_simulation_base.launch
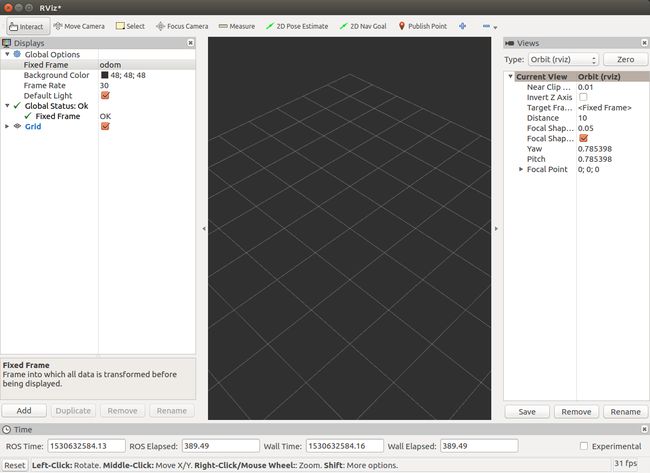
此时我们会发现打开了一个窗口,如图所示

在rviz的左侧Displays窗口,找到 Global Options -> Fixed Frame,并将后面的值选成odom,如下图
点击rviz左下角的Add按钮,在跳出的窗口中选择 rviz -> TF,并单击OK按钮
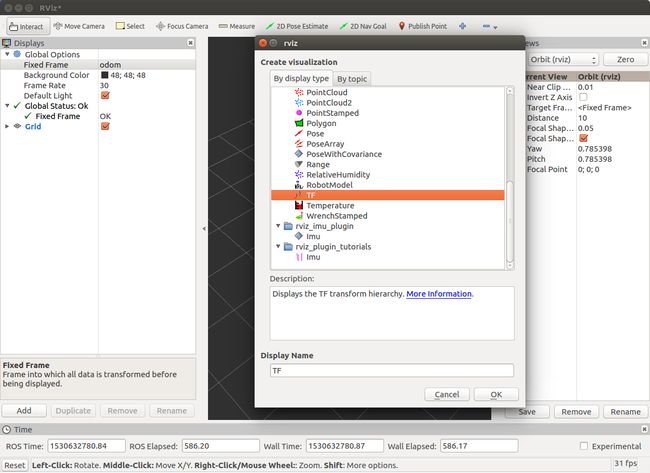
同上操作步骤,点击rviz左下角的Add按钮,添加 rviz -> RobotModel,并单击OK按钮

我们在中间区域看到一个小黄车,此时我们就可以使用键盘上的上,下,左,右控制小车行进。
我们再来详细看一下坐标转换关系,关闭小车模型,将视窗放大。
根据默认设置,base_link表示小车坐标系,随着通过键盘控制,base_link坐标系在移动,在中间两个静止的坐标系分别是odom(里程计编码器)和real_map(真实坐标系)。由于我们没有设置里程计噪音real_map和odom始终重合,也就意味着里程计信息完全准确。
这个时候我们可以尝试修改ROS脚本文件demo_simulation_base.launch,将noise_v_linear改成0.2,noise_v_theta改成0.5。
首先在刚才打开Terminal的窗口使用Ctrl+C,结束之前的命令,并输入下面内容。
sed -i 's///' demo_simulation_base.launch
sed -i 's///' demo_simulation_base.launch
此时再运行该脚本
roslaunch autolabor_simulation_base demo_simulation_base.launch
按照上面的方法在rviz中添加tf数据显示
会发现在小车行驶过程中,odom和real_map之间发生相对变化,这个变化就是里程计偏离真实位置的情况。