一、ROS图像接口
摄像头驱动安装
i5@i5-ThinkPad-T460p:~$ sudo apt install ros-kinetic-usb-cam
编写摄像头启动usb-cam.launch文件
usb_cam功能包中的参数
| 参数 | 类型 | 默认值 | 描述 |
|---|---|---|---|
| ~video_device | string | "/dev/video0" | 摄像头设备号 |
| ~image_width | integer | 640 | 横向分辨率 |
| ~image_height | integer | 480 | 纵向分辨率 |
| ~pixel_format | string | "mjpeg" | 像素编码 |
| ~io_method | string | "mmap" | IO通道 |
| ~camera_frame_id | string | "head_camera" | 摄像头坐标系 |
| ~framerate | integer | 30 | 帧率 |
| ~contrast | integer | 32 | 对比度,0-255 |
| ~brightness | integer | 32 | 亮度,0-255 |
| ~saturation | integer | 32 | 饱和度,0-255 |
| ~sharpness | integer | 22 | 清晰度,0-255 |
| ~autofocus | boolean | false | 自动对焦 |
| ~focus | integer | 51 | 焦点(非自动对焦状态下有效) |
| ~camera_info_url | string | "" | 摄像头校准文件路径 |
| ~camera_name | string | "head_camera" | 摄像头名称 |
usb_cam功能包中的话题
| 名称 | 类型 | 描述 |
|---|---|---|
| ~ |
sensor_msgs/Image | 发布图像数据 |
i5@i5-ThinkPad-T460p:~$ rosmsg show sensor_msgs/Image
std_msgs/Header header
uint32 seq
time stamp
string frame_id
uint32 height
uint32 width
string encoding
uint8 is_bigendian
uint32 step
uint8[] data
消息中各个域的含义如下:
- header
消息头,包含消息序号,时间戳,绑定坐标系 - height
图像纵向分辨率 - width
图像横向分辨率 - encoding
图像编码格式,包含RGB、YUV等常用格式,不涉及图像压缩编码 - is_bigendian
图像数据的大小端存储模式 - step
一行图像数据的字节数量,作为数据的步长参数 - data
存储图像数据的数组,大小为step*height个字节
启动摄像头
i5@i5-ThinkPad-T460p:~$ roslaunch vision_application usb_cam.launch
如果使用的是带内置USB摄像头的笔记本,此时摄像头应当已经启动了:
摄像头启动
查看摄像头图像
i5@i5-ThinkPad-T460p:~$ rqt_image_view
rqt_image_view
二、摄像头内参标定
内参属于摄像头自身参数,外参是指和机械臂之间的位置关系。标定内参是为了消除图像的畸变,再做后面的识别。ROS提供了标定功能包,直接命令行安装:
i5@pop-os:~$ sudo apt install ros-melodic-camera-calibration
安装后启动摄像头和标定功能程序:
i5@pop-os:~$ rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_cam
将标定板摆放不同的位置和角度,直到CALIBRATE变为绿色,点击,即可完成摄像头内参标定。
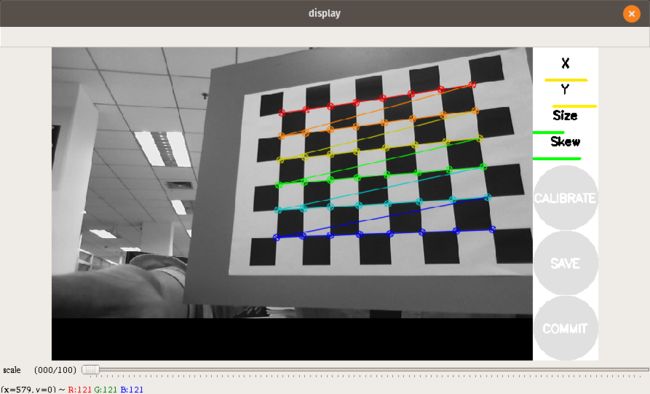
内参标定
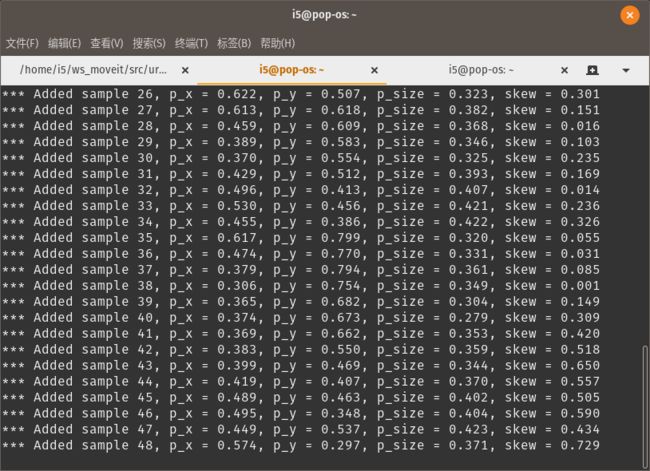
采样点

标定Ready
点击SAVE,程序将标定文件写入磁盘保存。
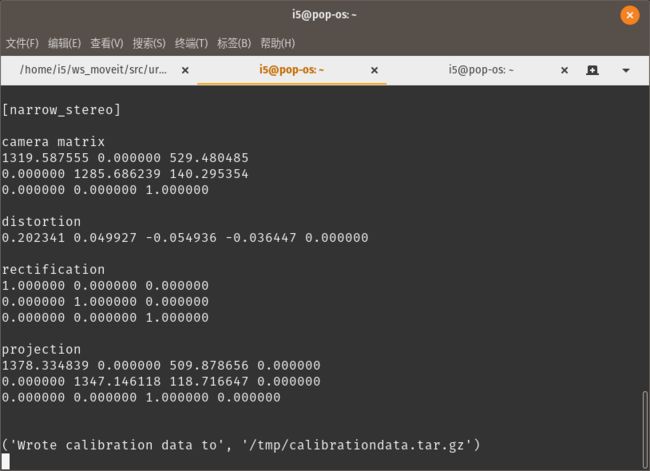
保存标定参数
解压后会得到一系列标定过程中获得的图片和一个yaml标定文件,这个标定文件即包含了摄像头的内参,可直接在usb_cam功能包中使用。

标定文件
得到标定文件后,在开头的usb_cam.lauch文件中加入tag:
再次启动摄像头后获得的图像即为标定后的图像了。如果启动过程中有警告:does not match name narrow_stereo in file,可尝试将yaml文件中的camera_name修改为head_camera后再重新启动。
三、ROS+OpenCV物体识别
在ROS中使用OpenCV,可以通过CvBridge功能包来实现ROS图像消息和OpenCV图像数据结构间的转换:
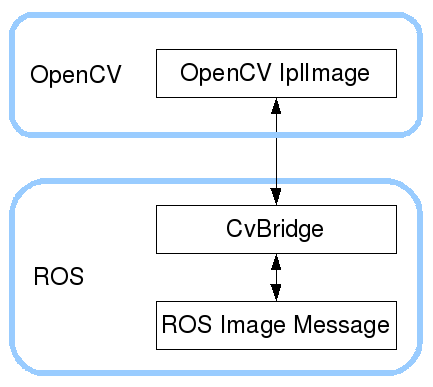
cv_bridge
在ROS中进行OpenCV物体识别开发一般经过如下的流程:
- ROS驱动摄像头,发布图像消息
- 将ROS图像消息转换成OpenCV图像数据
- OpenCV图像处理
- OpenCV图像转换成ROS消息
下面给出在ROS中使用OpenCV人脸识别API编写的程序示例:
头文件
#ifndef FACE_DETECTOR_HPP_
#define FACE_DETECTOR_HPP_
#include
#include
#include
#include
#include
#include
#include
#include "opencv2/highgui/highgui.hpp"
#include
#include
#include
////定义7种颜色,用于标记人脸
cv::Scalar colors[] =
{
// 红橙黄绿青蓝紫
CV_RGB(255,0,0),
CV_RGB(255, 97, 0),
CV_RGB(255, 255, 0),
CV_RGB(0, 255, 0),
CV_RGB(255, 97, 0),
CV_RGB(0, 0, 255),
CV_RGB(160, 32, 240),
};
class FaceDetector
{
public:
FaceDetector(ros::NodeHandle& nh);
~FaceDetector();
private:
void detectFace(const sensor_msgs::ImageConstPtr &msg);
void drawFace(cv::Mat &image, const std::vector &rect);
void imageCb(const sensor_msgs::ImageConstPtr &msg);
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::Publisher image_pub_;
cv_bridge::CvImagePtr cv_ptr_;
cv::Mat gray_img_;
cv::Mat process_img_;
cv::CascadeClassifier cascade_;
std::vector rect_;
};
#endif /* FACE_DETECTOR_HPP_ */
cpp文件
#include "face_detector.hpp"
FaceDetector::FaceDetector(ros::NodeHandle& nh) : it_(nh)
{
// 加载人脸分类器
cascade_.load("/usr/share/opencv/haarcascades/haarcascade_frontalface_alt2.xml");
image_sub_ = it_.subscribe("/usb_cam/image_raw", 1, &FaceDetector::imageCb, this);
image_pub_ = it_.advertise("/face_detect", 1);
}
FaceDetector::~FaceDetector()
{
ROS_INFO("Bye bye\n");
}
void FaceDetector::drawFace(cv::Mat &image, const std::vector &rect)
{
cv::Point center;
int radius;
for(int i = 0; i < rect.size(); i++)
{
center.x = cvRound((rect[i].x + rect[i].width * 0.5));
center.y = cvRound((rect[i].y + rect[i].height * 0.5));
radius = cvRound((rect[i].width + rect[i].height) *0.25);
cv::circle(image, center, radius, colors[i % 7], 2);
}
}
void FaceDetector::detectFace(const sensor_msgs::ImageConstPtr &msg)
{
try
{
cv_ptr_ = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception &e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
cv::Mat &image = cv_ptr_->image;
process_img_ = image.clone();
cv::cvtColor(image, gray_img_, CV_BGR2GRAY);
cascade_.detectMultiScale(gray_img_, rect_, 1.3, 4, 0);
ROS_INFO("%d face detected\n", static_cast(rect_.size()));
drawFace(process_img_, rect_);
cv_bridge::CvImage out_image;
out_image.encoding = cv_ptr_->encoding;
out_image.header = cv_ptr_->header;
out_image.image = process_img_;
image_pub_.publish(out_image.toImageMsg());
}
void FaceDetector::imageCb(const sensor_msgs::ImageConstPtr &msg)
{
detectFace(msg);
}
int main(int argc, char** argv )
{
ros::init(argc, argv, "simple_face_vision_detection");
ros::NodeHandle n_;
ros::WallDuration(0.1).sleep();
FaceDetector fd(n_);
while (ros::ok())
{
// Process image callback
ros::spinOnce();
ros::WallDuration(0.1).sleep();
}
return 0;
}
launch文件
启动后将看到标注人脸(如果有)的视频流,终端会打印检测到人脸的数目:
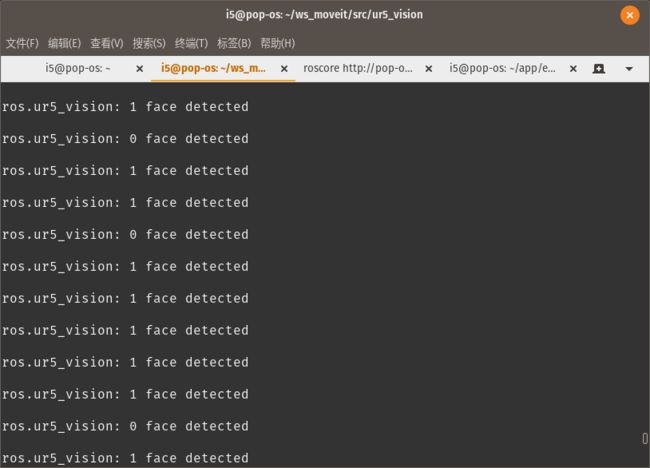
face detection