上节我们讲了 Python 的图像处理库 PIL 的基本图像处理功能,打开了 PIL 的神秘面纱。这节我们接着讲 PIL 的 Image 模块的常用方法。
Image 模块的方法
convert
Image.convert(mode=None, matrix=None, dither=None, palette=0, colors=256)
参数说明:
- mode:转换的模式
- matrix:可选转变矩阵。如果给出,必须为包含浮点值长为 4 或 12 的元组。
- dither:抖动方法。RGB 转换为 P;RGB 或 L 转换为 1 时使用。有 matrix 参数可以无 dither。参数值 NONE 或 FLOYDSTEINBERG(默认)。
- palette:调色板,在 RGB 转换为 P 时使用, 值为 WEB 或 ADAPTIVE 。
- colors:调色板的颜色值,默认 256.
转换图片模式,它支持每种模式转换为"L" 、 "RGB"和 "CMYK"。
有 matrix 参数只能转换为"L" 或 "RGB"。
当模式之间不能转换时,可以先转换 RGB 模式,然后在转换。
色彩模式转换为 L 模式计算公式
如下:
L = R * 299/1000 + G * 587/1000 + B * 114/1000
我们一般使用时,只用传需要转换的 mode 即可,其他的可选参数需要先理解图片深层次的原理后才可以理解,大家如果感兴趣可以去深入了解一下。下面我们来看一个简单实例:
from PIL import Image
im = Image.open('cat.png')
im.show()
# 将图像转换成黑白色并返回新图像
im1 = im.convert('L')
im1.show()
我们将一个图像转换成 L模式(灰色),转换结果如下图所示:

copy
Image.copy()
复制图像方法,该方法完全复制一个一模一样的图像,很好理解,我们就不举例说明了。
crop
Image.crop(box)
参数说明:
- box:相对图像左上角坐标为(0,0)的矩形坐标元组, 顺序为(左, 上, 右, 下)
该方法从图像中获取 box 矩形区域的图像,相当于从图像中抠一个矩形区域出来。我们来看例子:
from PIL import Image
im = Image.open('cat.jpg')
print(im.size)
im.show()
# 定义了图像的坐标位置,从左、上、右、下
box = (100, 100, 250, 250)
# 它会从左上角开始,同时向下和向右移动100像素的位置开始截取250-100的像素宽高,也就是150x150的图像
# 这里注意后两个数值要大于前两个数值,不然截取后的图像宽高为负数,会报错
region = im.crop(box)
print(region.size)
region.show()
# 输出结果
(451, 300)
(150, 150)
我们从 cat.jpg 这张图片中截取了 150x150 的图像,从打印结果可以看到截取前和截取后的图像大小。两张图像的对比如下图:
filter
Image.filter(filter)
参数说明:
- filter:过滤内核
使用给定的筛选器筛选此图像。有关可用筛选器的列表:
| 筛选器名称 | 说明 |
|---|---|
| BLUR | 模糊滤波,处理之后的图像会整体变得模糊。 |
| CONTOUR | 轮廓滤波,将图像中的轮廓信息全部提取出来。 |
| DETAIL | 细节增强滤波,会使得图像中细节更加明显。 |
| EDGE_ENHANCE | 边缘增强滤波,突出、加强和改善图像中不同灰度区域之间的边界和轮廓的图像增强方法。 |
| EDGE_ENHANCE_MORE | 深度边缘增强滤波,会使得图像中边缘部分更加明显。 |
| EMBOSS | 浮雕滤波,会使图像呈现出浮雕效果。 |
| FIND_EDGES | 寻找边缘信息的滤波,会找出图像中的边缘信息。 |
| SHARPEN | 锐化滤波,补偿图像的轮廓,增强图像的边缘及灰度跳变的部分,使图像变得清晰。 |
| SMOOTH | 平滑滤波,突出图像的宽大区域、低频成分、主干部分或抑制图像噪声和干扰高频成分,使图像亮度平缓渐变,减小突变梯度,改善图像质量。 |
| SMOOTH_MORE | 深度平滑滤波,会使得图像变得更加平滑。 |
看到这些,大家是不是联想到我们手机上一些 APP 的图像处理功能了,其实那些功能的实现方式跟我们这里讲的方法是一样的。我们来看个例子:
from PIL import Image
from PIL import ImageFilter
im = Image.open('flower.jpg')
im.show()
# 模糊
im2 = im.filter(ImageFilter.BLUR)
im2.show()
# 轮廓滤波
im3 = im.filter(ImageFilter.CONTOUR)
im3.show()
# 细节增强
im4 = im.filter(ImageFilter.DETAIL)
im4.show()
我们分别对原图了使用了模糊滤波、轮廓滤波、细节增强滤波的处理,大家运行程序就可以看到处理后的效果了,如下图所示:
getbands
Image.getbands()
返回一个包含此图像中每个通道名称的元组。直接看实例:
from PIL import Image
# 打开图像
im = Image.open('cat.jpg')
# 创建新图像
im1 = Image.new('L', (450, 450), 50)
# 获取图像的通道名称元组
print(im.getbands())
print(im1.getbands())
# 输出结果
('R', 'G', 'B')
('L',)
上例中,我们分别打开一个 RGB 图像和创建一个 L 模式的新图像,然后打印输出他们的通道名称。
getbbox
Image.getbbox()
计算图像中非零区域的边界框。将边界框作为定义左、上、右和下像素坐标的四元组返回。我们来看例子:
from PIL import Image
# 打开图像(451x300)
im = Image.open('cat.jpg')
# 创建新图像(450x450)
im1 = Image.new('L', (450, 450), 50)
# 打印图像中非零区域的边界框
print(im.getbbox())
print(im1.getbbox())
# 输出结果
(0, 0, 451, 300)
(0, 0, 450, 450)
这个方法很简单,很容易理解,那么这个方法有什么用处呢?最直接的一个用处就是迅速地获取图像的边界坐标。
getcolors
Image.getcolors(maxcolors=256)
参数说明:
- maxcolors:最大颜色数。默认限制为256色。
获取图像中颜色的使用列表,超过 maxcolors 设置值返回 None 。
返回值为 (count, pixel) 的列表,表示(出现的次数,像素的值)
from PIL import Image
im = Image.open('cat.png')
# 将彩色图像转换成灰度图
im2 = im.convert("L")
# 打印灰度图的颜色列表,返回的点数超过maxcolors就直接返回None
print(im2.getcolors(maxcolors=200))
print(im2.getcolors(maxcolors=255))
# 输出结果
None
[(1, 0), (69, 1), (275, 2), (518, 3), (165, 4), ... (6, 250), (1, 251)]
我们这个图像有252个像素值,所以第一次 maxcolors 设置为200时,由于 252>200,所以返回了 None。第二次设置255时,正常返回。
getdata
Image.getdata(band=None)
参数:
- band:获取对应通道值。如:RGB 图像像素值为 (r,g,b) 的元组,要返回单个波段,请传递索引值(例如0,从 RGB 图像中获取 R 波段)。
获取图像中每个像素的通道对象元组,像素获取从左至右,从上至下。
getextrema
Image.getextrema()
获取图像中每个通道的最小值与最大值。对于单波段图像,包含最小和最大像素值的2元组。对于多波段图像,每个波段包含一个2元组的元组。
getpixel
Image.getpixel(xy)
参数:
- xy:坐标,以(x,y)表示。
通过传入坐标返回像素值。如果图像是多层图像,则此方法返回元组。
point
Image.point(lut, mode=None)
参数说明:
lut:一个查找表,包含图像中每个波段的256个(或65536个,如果 self.mode==“I” 和 mode==“L”)值。可以改用函数,它应采用单个参数。对每个可能的像素值调用一次函数,结果表将应用于图像的所有带区。
mode:输出模式(默认与输入相同)。只有当源图像具有模式 “L” 或 “P” ,并且输出具有模式 “1” 或源图像模式为 “I” ,并且输出模式为 “L” 时,才能使用此选项。
对图像的的每个像素点进行操作,返回图像的副本。
from PIL import Image
im = Image.open('cat.png')
# 调整灰色图像的对比度
im_point=im.convert('L').point(lambda i: i < 80 and 255)
im_point.show()
source = im.split()
# 三通道分别处理对比度
band_r = source[0].point(lambda i: i < 80 and 255)
band_g = source[1].point(lambda i: i < 80 and 255)
band_b = source[2].point(lambda i: i < 80 and 255)
band_r.show()
band_g.show()
band_b.show()
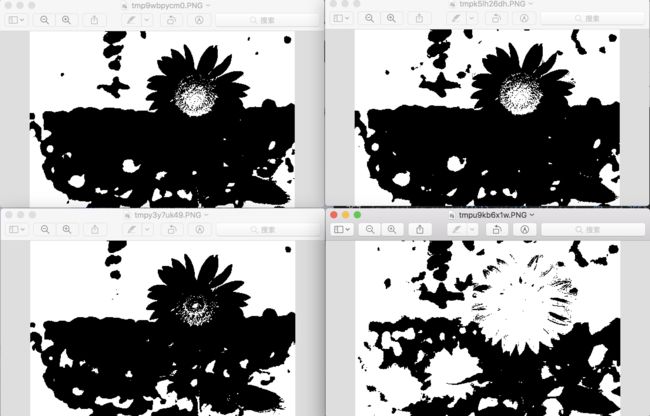
在例子中,我们先将图像转换成 L 模式,然后调整对比度,以及将图像的三个通道分别调整对比度。所谓调整对比度,我们这个例子的规则就是当像素值小于80时,将其调整为255,相当于将接近黑色的像素点加黑,使其与浅色对比更明显。运行效果如下图:
resize
Image.resize(size, resample=0, box=None)
参数说明:
- size:以像素为单位的请求大小,作为2元组:(宽度、高度)。
- resample:可选的重新采样滤波器。可以是 PIL.Image.NEAREST(最近滤波) , PIL.Image.ANTIALIAS (平滑滤波), PIL.Image.BILINEAR (双线性滤波), PIL.Image.HAMMING , PIL.Image.BICUBIC (双立方滤波)。如果省略,或者图像具有模式 “1” 或 “P” ,则设置为 PIL.Image.NEAREST 。
-box:一个可选的4元组的浮点数,给出了应该缩放的源图像区域。值应在(0,0,宽度,高度)矩形内。如果省略或没有,则使用整个源。
这个方法是获取调整大小后的图片。通俗地讲就是在原图中抠一个矩形区域(如果传入了 box 参数),然后对抠出来的区域进行滤波处理(如果传入了 resample 参数),最后以指定的 size 大小进行返回。
from PIL import Image
im = Image.open('flower.jpg')
img1 = im.resize((250, 250), Image.BILINEAR)
img2 = im.resize((250, 250), Image.BICUBIC)
img3 = im.resize((250, 250), Image.NEAREST)
im.show()
img1.show()
img2.show()
img3.show()
这几个滤波器的具体的原理比较理论,大家对照着程序运行返回自行去深入了解。
关于 PIL 的 Image 模块的方法我们只讲这么多,还有好多其他方法,大家可参照 https://www.osgeo.cn/pillow/reference/ 这个网站去尝试。
我们讲的 PIL 的 Image 模块只是 PIL 的一个基础模块而已,它还有好多其他的模块,诸如 ImageChops (通道操作模块)、ImageColor (颜色转换模块)、ImageDraw (二维图形模块)等,大家在需要的时候可以去查找 API 使用。
总结
pillow 库是一个非常强大的基础图像处理库,若不深入图像处理,运用这个库里面的方法组合,对图像进行各种常见的操作已经够用,这是计算机图片识别的基础。当然,如果需要更专业的操作,那么就直接上 opencv 吧。
参考
https://www.osgeo.cn/pillow/reference/