小波基函数的选择和小波构造
滤波器组完美重构与小波快速算法。
前面的分析可以知道Vj相当于在j分辨率的逼近,Vj-1相当于j-1分辨率的逼近,这样Wj-1相当于两个分辨率逼近的差。在高分辨率下,我们可以用f在(2^j*t)的采样值来代替向Vj空间的投影,但是这是需要说明的,否则成为“小波的罪恶”,本来在Vj上的投影需要函数对Vj上的基{2^(j/2)*m(2^j*t –n)}投影,用采样值来代替是因为当j足够大的时候,如一般情况下j=7~9时,尺度函数已经非常窄,以致用delta采样来表示误差可以忽略(其实数学推导中还因为尺度函数的消失矩有关),但是必须理解这个取代是近似的。
得到了第j层的系数,如何求得j-1层的逼近系数和两个逼近层次间的误差系数呢?这就是mallat由MRA得出的快速算法。这个算法由上面列出的几个空间和相应基的关系很容易得出。同样重构算法也可以推导得出。(具体可以查看任意一本小波书)
到这里是不是就结束了呢,那这样的话MRA也得不到这么大的名声了,它的伟大之处是与完美滤波器重构桥接上了,从而为小波构造提供了一个普遍的方法,个人认为双正交小波也是由滤波器组理论发展出来。
把快速算法的一级分解和重构结构画出来,这不就是一个完美滤波器重构么?之前对完美滤波器的重构的结论大都可以搬上来了,大家熟知的两个PR方程其实也可以通过MRA下的空间关系推出。当然单由这两个方程得到的h和g有很多解,并不是每个解都可以收敛到尺度函数和小波函数,必须附加其他条件,其中以Daubechies的p阶消失矩条件构造出的小波应用得最多(Daubechies系列小波)。
很遗憾,除了Haar小波以外(haar小波可由一阶消失矩条件构造出来),没有正交小波满足对称性条件,也就是不满足线性相位,这样在分解重构后会造成失真,在一些需要对称性的场合(如图像的分解重构,奇异点的检测等),结果是不能满足要求的。
为了构造具有光滑特性,一定消失矩,对称的小波,就不得不放弃正交条件,也就是前面提到的双正交多分辨分析
在正交情形下,我们只需要知道H0,就可以由共轭镜像滤波器条件推导得出其他滤波器为G0,H1,G1(是H0的逆序及调制),也就是我们只需要知道一个滤波器。在双正交情形下,由完美重构滤波器条件可从H0,G0推导出H1和G1(通过逆序及调制),这表示我们需要知道两组滤波器。{(H0,G0)(H1,G1)}这两组(双)正交滤波器是可以对调的,就是谁做分解另一组就做重构。由滤波器来造小波的步骤前面已经提及!四个滤波器之间的关系是相互交叉的,即G1由H0逆序调制,而H1由G0逆序调制。
当然我们希望尺度函数和小波是紧支的(暗含滤波器也是紧支的),否则在计算时需要进行截断,正交紧支小波的对偶为其自身,当然也是紧支的,但是有一个定理:紧支非正交小波,其对偶必然是无限支集的,可能你会很奇怪,我们平时用的双正交小波不都是紧支的么,其实这些紧支双正交小波是经过提升的,Daubechies有一个定理,任何双正交滤波器可通过对惰性滤波器不断做提升和对偶提升而生成!你只需要了解这一事实即可,深入的理解恐怕需要太多的数学知识。至于提升我也希望我能有时间写一个总结,从框架的角度来理解提升,恐怕会容易得多,只是这个愿望可能不太好实现,因为这必须要大量的推导来表述。
最后说说消失矩这个条件,Haar小波得不到应用是因为它的消失矩为1,也就是对大于一次多项式的函数的“消失”效果不好,所谓消失矩其实就是对多项式的抑制能力,消失矩越高,与信号做内积得到的系数越少越小,这在度量信号局部正则性和压缩方面是相当重要的。提升就是一种提高小波消失矩和正则性的及其重要的手段。
注:由mallat算法得到的快速算法不具有平移不变性,其中的原因是因为采样因子是不具有平移不变性的。如果需要保持平移不变性,则需要去掉抽取这一步(多孔算法),其实不是去掉,如果去掉了,就不是小波变换了,而是利用noble identity把抽样算子移到每一分支的分解完全结束之前而已。得到的是每次分解得到原来两倍长信号,而mallat算法是每次抽掉了其中的一部分,这样随着分解层次的增加,小波系数也越来越稀。多孔也抽,不过移到最后一起抽,然后在重构之前同数目的上采样。
注:实际编程实现的时候由于要做滤波器卷积,每次卷积完后要用wkeep保持原来的长度。
另外,如果觉得这里不好看的,可以上我的博客里面看看
http://blog.sina.com.cn/dingkeke
我觉得自己是用心写了的,还有几个就把小波的基础部分写玩了,不知道有没有写更深入的东西,毕竟马上就要进实验室了
(五)小波的性质及构造
很明显随附加条件不同,我们可以构造出无穷多的正交或双正交小波,Mallat说过,如果没有应用的刺激,小波的构造将变成聊的游戏,这里我们先分析小波具有的性质,然后谈谈如果根据应用来构造(更多情况是选择)小波。
前面虽然给出了小波构造的统一方法,但感觉太笼统,太灵活,这需要些著名的定理来逐步加强认识,既然是定理,大家就试着接受,记住,再理解好了。这里我们只谈紧支正交小波的构造,因为紧支双正交小波的构造已经涉及到了提升的概念。
性质1:消失矩(Vanishing Moment),这可以说是小波最具杀伤力的一个性质,压缩,去噪,快速计算等无不希望小波VM越高越好,虽然是通过滤波器卷积来求小波系数,但是思考上仍然用信号与小波的内积来表示,这样有助于理解小波的性质。由VM的定义可知具有p阶消失矩的小波与小于p次的多项式是正交的,也就是内积为0,这样若函数f是正则的且小波有足够的消失矩,则内积产生很小的系数。注,讨论函数的局部正则性其实是一个比较复杂的问题,在这里,姑且将f在某点附近想成一个k阶多项式和一个误差函数的逼近,这样当k
性质2:正则性,小波的正则性(光滑程度),即使理论上的完全重构,在计算机实施的时候会引起由于量化和截断造成的误差,这样在重构的时候,若小波基不够光滑,则引入的误差很容易被人察觉,如haar小波,若小波基足够正则,引入的光滑误差不容易被察觉。有结论说明,对重要的共轭镜像滤波器族,如样条和Dx系列,小波的正则性随消失矩提高而提高
性质3:紧支性,我们当然希望我们的滤波器越短越好,因为这意味着计算量的大大减少,同时考虑到小波滑动作内积时包含到函数奇异点的时候同样可能造成大幅值系数(支集越长,包含奇异点的小波次数越多),这样若想大幅值系数数目最小,必须尽可能减小支集长度。前面提到了,紧支与消失矩是矛盾的,为了得到更小的系数,需要高的消失矩,而要得到更少的系数,希望小的支集。有定理在给定的消失矩情形下,Dx系列小波具有最小支集
在这个意义上,这个系列小波是最优的。
注:紧支性和消失矩可以在多小波构造下得到更好的权衡,在实际情况中,我们更多是根据信号的奇异程度来权衡,若信号奇异点很少,则考虑高的消失矩,若奇异点很平凡,则考虑更短的支集。
性质4:对称性,对正交小波来说,除haar外不存在对称或反对称小波,这点daubechies已经严格证明了,而且由消失矩条件通过最小相位构造的小波是极不对称的,这在某些应用中是不好的性质,如奇异点的确定,图像的重构等等,至于symmlet滤波器虽然更对称,但是产生了复小波系数
双正交小波的性质与正交小波是类似的,但是可以做到完全对称,上面讨论的性质对双正交小波依然适用,前面提到双正交情形两组滤波器的位置是可以互调的,在这里我们一般选用消失矩高的小波来做内积,然后用另一个小波做重构(它通常都是最光滑的那个)
在了解了小波的各种性质之后,我们就可以根据不同的应用来构造或选择我们适合的小波了,这在后面具体的应用中会反复提到。
(六)再谈滤波器与小波的关系
大家肯定都熟知了小波构成了L^2的(双)正交基,我们习惯在脑海中把小波系数的幅度看成未被采样的函数和小波之间的相似性度量,这也是我们获得的清楚的物理意义,那么滤波器组的角色仅仅是提供一个快速计算?那就太浅显了,我们回忆下mallat的快速算法,对函数进行采样后近似表示系数,是不是可以考虑成l^2(Z)中的函数呢?当然可以!那l^2(Z)的基是什么呢?
再回头看看快速分解的公式:第j层的低频系数Aj(n)与滤波器h(n)卷积后做下采样得到j-1层低频系数Aj-1,这个过程可以写成第j层的系数Aj(n)与下采样的滤波器h(2n)做卷积,也可以写成Aj-1(k) = < Aj(n),h(2k-n)>,这个形式是不是很熟悉呢,仔细看是l^2(Z)中的函数在基h(2k-n)下投影,系数为Aj-1(k);同理可以得到第j-1层细节系数Dj-1(k) = < Aj(n),g(2k-n)>,同样是l^2(Z)中的函数Aj(n)在基g(2k-n)下投影,那这个h和g是不是就是我们要找的离散小波基呢?
可以由滤波器完美重构的条件推得如下结论:
如果h(-n),g(-n),h1,g1是完全重构滤波器组且傅立叶变换都有界,则{h(2k-n),g(2k-n)|k属于Z}和{h1(2k-n),g1(2k-n)|k属于Z}构成了l^2(Z)的双正交resize基
如果上面的h(n)=h1(n),g(n)=g1(n),则{h(2k-n),g(2k-n)|k属于Z}构成了l^2(Z)的规范正交基。
这个结论的含义是什么呢?我们找到了l^2(Z)的离散小波(双)正交基!而且这些滤波器基按照小波树形分解结构得到的基仍然是l^2(Z)的离散小波(双)正交基!
注,好好理解这两句话,可能你需要对正交基或者双正交基的好处有一些体会!其实同样的方法可以构造离散的小波包的基。
大家都知道我们计算机处理的都是离散信号,以前的快速算法似乎通过将采样数据离散来近似高分辨率数据,然后通过连续小波基之间的尺度关系来推出的快速算法,而现在我们可以完全在离散情况下来考虑这个问题了,因为我们从大自然采集离散数据本身就很方便,我们只需要满足采样定律来保存原信号的信息;同时我们把滤波器看成基,这对以后的提升理解是有帮助的(对这句话有兴趣的可以和我交流)。
那滤波器基和小波基有什么关系呢,考虑对尺度方程和小波方程两边做傅立叶变换,可以通过反复迭代取极限求得尺度函数和小波基的傅立叶变换,也就是我们把滤波器通过某种方式无穷迭代最后会收敛到尺度函数和小波基,这个就叫cascade算法吧,事实上我们经过三五次迭代的结果就与连续尺度函数和小波基非常相似了。
注:并不是所有的h,g都可以最后收敛的,必须加条件,但我认为这样的h,g同样也可以用来做分解的,这似乎决定了构造离散的基比连续情况的基要简单。至于用不能收敛的h,g来分析有什么后果我还没有深入研究过。
其实以前就接触到很多结论中就有尺度函数和小波与对应滤波器组之间的关系了,如消失矩,滤波器在pi处的零点重数与小波基的消失矩是对应的,这些都是通过尺度方程和小波方程联系起来的,可以说这两个方程为我们的连续与离散架起了一座桥梁!
小波变换的基本概念
基本概念,基本公式的推导:小波变换的定义。
给定一个基本函数ψ(t) ,令 (1)式中a,b均为常数,且a>0 。显然,
是基本函数ψ(t)先作移位再作伸缩以后得到的。若a,b不断地变化,我们可得到 一族函数 。给定平方可积的信号x(t),即,则x(t)的小波变换(Wavelet Transform,WT)定义为
式中a,b和t均是连续变量,因此该式又称为连续小波变换(CWT)。如无特别说明,式中及以后各式中的积分都是从-∞到+∞。信号x(t)的小波变换是a和b的函数, b是时移a是尺度因子。ψ(t)又称为基本小波,或母小波。是母小波经移位和伸缩所产生的一族函数,我们称之为小波基函数,或简称小波基。这样, (2)式的WT又可解释为信号x(t)和一族小波基的内积。母小波可以是实函数,也可以是复函数。若x(t)是实信号,ψ(t)也是实的,则也是实的,反之, 为复函数。在(1)式中,b的作用是确定对x(t)分析的时间位置,也即时间中心。尺度因子a的作用是把基本小波ψ(t)作伸缩。由ψ(t)变成 ,当a>1时,若a越大,则的时域支撑范围(即时域宽度)较之ψ(t)变得越大,反之,当a<1时, a越小,则 的宽度越窄。这样,a和b联合越来确定了对x(t)分析的中心位置及分析的时间宽度,如图1所示。
图1 基本小波的伸缩及参数a和b对分析范围的控制 (a)基本小波,(b)b>0,a=1,(c)b不变,a=2, (d)分析范围
这样,(2)式的WT可理解为用一族分析宽度不断变化的基函数对x(t)作分析,由下一节的讨论可知,这一变化正好适应了我们对信号分析时在不同频率范围所需要不同的分辨率这一基本要求。(1)式中的因子是为了保证在不同的尺度a时,始终能和母函数ψ(t)有着相同的能量,即
令,则,这样,上式的积分即等于。令x(t)的傅里叶变换为X(Ω),ψ(t)的傅里叶变换为Ψ(Ω),由傅里叶变换的性质, 的傅里叶变换为:
由Parsevals定理,(2)式可重新表为
此式即为小波变换的频域表达式。
讨论研究数据仓库构建理论与方法,分析已经实现的数据仓库模型及其实现过程,探索数据仓库架构与实施的机制。数据仓库的安全问题不容忽视,通过操作系统和数据库的安全机制,加强数据仓库操作权限的管理。对数据仓库中的相关数据要及时备份,并利用RAID配置备份数据仓库,以提高数据仓库的安全性和可用性。
5.2小波变换的特点
从小波变换的恒Q性质、时域及频率分辨率以及和其它变换方法的对比来讨论小波变换的特点,以帮助学生对小波变换有更深入的理解。从而得到小波变换在对信号分析时的特点,还可得到在不同尺度下小波变换所分析的时宽、带宽、时间中心和频率中心的关系。信号中的高频成份往往对应时域中的快变成份,如陡峭的前沿、后沿、尖脉冲等。对这一类信号分析时则要求时域分辨率要好以适应快变成份间隔短的需要,对频域的分辨率则可以放宽,当然,时、频分析窗也应处在高频端的位置。与此相反,低频信号往往是信号中的慢变成份,对这类信号分析时一般希望频率的分辨率要好,而时间的分辨率可以放宽,同时分析的中心频率也应移到低频处。显然,小波变换的特点可以自动满足这些客观实际的需要。总结小波变换的特点可以得到结论,当用较小的a对信号作高频分析时,实际上是用高频小波对信号作细致观察,当我们用较大的a对信号作低频分析时,实际上是用低频小波对信号作概貌观察。小波变换的这一特点即既符合对信号作实际分析时的规律,也符合人们的视觉特点。
小波变换的计算性质
基本公式的推导:小波变换的计算性质。
以时移性质为例,用公式推导的方法证明小波变换的计算性质。
1.时移性质
若的CWT是,那么的CWT是。该结论极易证明。记,则
尺度转换性质指出,当信号的时间轴按λ作伸缩时,其小波变换在a和b两个轴上同时要作相同比例的伸缩,但小波变换的波形不变。这是小波变换优点的又一体现。微分性质、两个信号卷积的CWT、两个信号和的CWT、小波变换的内积定理。
波反变换及小波容许条件(2学时)
基本公式的推导:小波反变换及小波容许条件。根据参考资料中的相关定理。
下述定理给出了连续小波反变换的公式及反变换存在的条件。
定理:设,记为的傅里叶变换,若
则可由其小波变换来恢复,即
(9.4.1)
证明:则
将它们分别代入(9.3.8)式的两边,再令,于是有
于是定理得证。
在定理9.1和定理9.2中,结论的成立都是以<为前提条件的。(9.3.9)式又称为“容许条件(admissibility condition)。该容许条件含有多层的意思:
并不是时域的任一函数都可以充当小波。其可以作为小波的必要条件是其傅里叶
变换满足该容许条件;
由(9.3.9)式可知,若,则必有,否则必趋于无穷。这等效地告诉我们,小波函数必然是带通函数;
由于,因此必有
(9.4.2)
这一结论指出,的取值必然是有正有负,也即它是振荡的。
以上三条勾画出了作为小波的函数所应具有的大致特征,即是一带通函数,它的时域波形应是
振荡的。此外,从时-频定位的角度,我们总希望是有限支撑的,因此它应是快速衰减的。这样,时域有限长且是振荡的这一类函数即是被称作小波(wavelet)的原因。
由上述讨论,自然应和一般的窗函数一样满足:
(9.4.3)
由后面的讨论可知,尺度常按来离散化,.由(9.1.3)式,对应的傅里叶变换,由于我们需要在不同的尺度下对信号进行分析,同时也需要在该尺度下由来重建,因此要求是有界的,当由时,应有
(9.4.4)
式中。该式称为小波变换的稳定性条件,它是在频域对小波函数提出的又一
要求。满足(9.4.4)式的小波称作“二进(dyadic)”小波。
小波的分类
作为一个小波的函数 ,它一定要满足容许条件,在时域一定要是有限支撑的,同时,也希望在频域也是有限支撑的,当然,若时域越窄,其频域必然是越宽,反之亦然。在时域和频域的有限支撑方面我们往往只能取一个折中。此外,我们希望由母小波形成的 是两两正交的,或是双正交的;进一步,我们希望 有高阶的消失矩,希望与 相关的滤波器具有线性相位,等等。根据上述要求对现已提出的大量的小波函数作一粗略地分类。第一类是所谓地“经典小波”,在MATLAB中把它们称作“原始(Crude)小波”。这是一批在小波发展历史上比较有名的小波;第二类是Daubecheis构造的正交小波,第三类是由Cohen,Daubechies构造的双正交小波。经典类小波又可以分为Haar小波、Morlet小波、 Mexican hat小波、Gaussian小波;正交小波又可以分为Daubechies小波、对称小波、Coiflets小波、 Meyer小波;以及双正交小波。
5.6小波研究发展趋势
事实上小波分析的应用领域十分广泛,它包括:数学领域的许多学科;信号分析、图象处理;量
子力学、理论物理;军事电子对抗与武器的智能化;计算机分类与识别;音乐与语言的人工合成;医学成像与诊断;地震勘探数据处理;大型机械的故障诊断等方面;例如,在数学方面,它已用于数值分析、构造快速数值方法、曲线曲面构造、微分方程求解、控制论等。在信号分析方面的滤波、去噪声、压缩、传递等。在图象处理方面的图象压缩、分类、识别与诊断,去污等。在医学成像方面的减少B超、CT、核磁共振成像的时间,提高分辨率等。
(1)小波分析用于信号与图象压缩是小波分析应用的一个重要方面。它的特点是压缩比高,压缩速度快,压缩后能保持信号与图象的特征不变,且在传递中可以抗干扰。基于小波分析的压缩方法很多,比较成功的有小波包最好基方法,小波域纹理模型方法,小波变换零树压缩,小波变换向量压缩等。
(2)小波在信号分析中的应用也十分广泛。它可以用于边界的处理与滤波、时频分析、信噪分离与提取弱信号、求分形指数、信号的识别与诊断以及多尺度边缘检测等。
(3)在工程技术等方面的应用。包括计算机视觉、计算机图形学、曲线设计、湍流、远程宇宙的研究与生物医学方面。
http://bcont.cuc.edu.cn/iip/kcnr/dssij.html
http://bcont.cuc.edu.cn/iip/kcnr/kcnr.html
对于双通道滤波器组来说,不管他们是一维还是两维,除了不连续的Harr小波,没有一个是可以同时具有对称 (线性相位)、紧支(FIR)和正交特性的[3]。然而,滤波器的对称性(线性相位)可以保证输入信号所导致的相位延迟不会造成其波形的失真;正交小波滤波器具有保持能量的优点,即具有正交性的线性系统输入和输出的能量相同;FIR滤波器实现不会引起截断误差,所以在实际的信号处理过程中,需要滤波器具有上述三个特性,这必然要求牺牲其中的某个特性。本文提出一种方法,在保证滤波器是对称的FIR滤波器的同时,使得它与正交性的偏差可以小于任意给定的ε。其基本思路是:对于一个给定的对称滤波器,在混叠频率处放置多个零点,使其与正交滤波器之间的偏差最小,从而获得准正交滤波器组。由于放置了多个零点,那么从最小化滤波器中可以产生一个尺度函数, 从而可以构造可准确重建的半正交小波滤波器组。对于这个半正交滤波器组,其小波函数在不同尺度进行的整数倍平移是完全正交的,而在同一尺度上不同整数倍平移是准正交的。半正交滤波器组非常接近准正交滤波器组,而且它能够通过相应的准正交滤波器组实现,准正交滤波器组中的每一个滤波器都是相应的半正交滤波器组的一个很好的近似实现。
一维与二维准正交对称小波滤波器组的分析与设计
姓名 孟彦杰
院系 北京大学信息科学技术学院 微电子学与固体电子学专业
学位类型 硕士
第一导师姓名 张天义 北京大学信息科学技术学院
第二导师姓名 赵勇 北京大学深圳研究生院
本人用小波作故障诊断,并进行一些调和分析研究。由于正交小波不能同时满足紧支集、连续性和对称性,尤其是不满足对称性使得信号处理时造成相位失真,故需要放宽正交条件来构造双正交小波(对偶正交基)。请问对称性与相位失真什么关系?为什么双正交就能消除相位失真?
你提到的对称确实是这样的
“小波的线性相位除了在信号重构时能保证重构信号不失真外,对突变信号时
刻准确地定位也要求小波具有线性相位。”
“一次Gauss_H小波(反对称小波)和二次B样条小波(对称小波)对突变点的定位
优于DB4小波,这是由于DB4小波不具有线性相位的原因。因此定位时应选择对称
或反对称小波,它的线性相位保证了对暂态信号定位的准确性”
因为只是拿来当作工具来用
我很少对小波的数学原理有过多了解
小波基选择及其优化
http://202.96.31.71:85/~kjqk/zzgxyxb/zzgx2003/0305pdf/030510.pdf
在利用小波变换方法对信号进行处理的过程中,小波基函数的选择十分重要,利用不同小波基函数对信号进行分解,可以突出不同特点的信号特征。在小波基函数的选择中Daubechies小波是紧支正交基,满足精确重建条件,但由于紧支小波不具有对称性,因而其边界效应会随尺度的增加而扩大,引起分解及重建误差。样条小波是一种非紧支正交的对称小波,具有较高的光滑性,频率特性好,分频能力强,频带相干小,且具有线性相位特性,由于对称性原因,只要采取合理的延拓方法,其边界效应引起的误差可忽略不计。因此在本文心电信号的分解及合成中选择了样条小波作为小波基函数。虽然非紧支小波会形成无限长滤波器,截断误差的产生是不可避免的,只要根据信号的特点及计算的复杂程度选择合适的滤波器长度,即可满足不同信号处理的要求。通常样条小波阶数越低,时域内衰减越快,但频域内截止性较差,阶数高,结果则相反。
http://www.hudong.com/wiki/基线拟合?prd=citiao_right_xiangguancitiao
双正交小波
双正交小波可以同时具备紧支撑、高消失矩和对称性,其构造理论得到了人们的广泛重视和研究。
基本概况
小波分析是纯粹数学和应用数学的完美结合,理论上它是刻画函数空间与研究算子作用的重要 方法,它的产生、发展和应用始终受益于计算机科学、信号处理、图像处理、应用数学和纯粹数学、等众多科学研究领域专家学者和工程师们的共同努力。
历史发展
1990年,崔锦泰和王建忠构造了基于样条的双正交小波函数,并讨论了具有最好局部化性质的尺度函数和小波函数; 1992年,Daubechies等人提出了具有紧支撑的双正交小波基; . 1992年,A Cohen等人又构造了具有线性相位的双正交小波,使小波分析更适用于信号处理; 1994年12月,Sweldens Wim提出了不依靠傅里叶变换,而运用提升算法构造的双正交小波(称之为第二代小波)变换; 1996年,SweldenS从一个全新的视角来讨论紧支集双正交小波函数的构造,提出了一种上升型方案。[1]
主要分类
双正交小波构造方法可大致分为两类:频谱分解和提升格式。传统的双正交小波构造方法基于频谱分解,其中有代表性的是Cohen等人提出的CDF方法。通过预先指定小波及其对偶的消失矩,再对相应的三角多项式进行频谱分解,他们构造出双正交样条小波(Biorthogonal Spline Wavelet,BSW)系列以及无理数系数的CDF9-7,CDF11-9等小波。然而,该类方法构造过程复杂、不易推广,且在构造高消失矩小波时需要分解高阶三角多项,这并不是一个平凡的数学过程。
构造方法
提升格式是一种完全基于时域的双正交小波构造方法,与频谱分解方法相比,,提升格式有固定的小波构造公式,其不仅简单易于理解,具有通用性和灵活性,而且有高效的小波变换实现方式。基于提升格式的小波理论与应用迅速吸引了众多专家的密切关注。具体到双正交小波构造方面:Sweldens给出了Deslauriers-Dubuc小波(D-DW)系列的提升构造过程。Li等人研究了提升格式与消失矩的关系,提出从任意小波出发,构造具有任意消失矩小波的方法。Cheng等人提出了和CDF9-7、CDF11-小波具有相同支撑长度双正交小波的提升构造算法,Averbuch和Zheludev从插值样条函数出发利用提升格式构造了部分D-DW和一系列IIR双正交小波.,He研究了样条类型小波构造,并指出部分高消失距BSW可通过相应的低消失矩BSW一步提升构造。[2]
主要优点
小波分析是纯粹数学和应用数学的完美结合,理论上它是刻画函数空间与研究算子作用的重要方法,它的产生、发展和应用始终受益于计算机科学、信号处理、图像处理、应用数学和纯粹数学、等众多科学研究领域专家学者和工程师们的共同努力。 [2]
- 参考资料
-
与双正交小波相关的历史事件
http://trend.cnki.net/more.php?searchword=双正交小波&type=history
学术论文——双正交小波的提升构造研究
http://d.wanfangdata.com.cn/Periodical_jsjxb200902013.aspx
l 提升原理
小波提升是一种构造紧支集双正交小波的新方法。
1)步骤
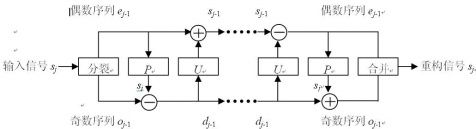
由提升构成第二代小波变换的过程分为如下3个步骤:
(1) 分裂
分裂(Split)是将原始信号sj = { sj,k }分为两个互不相交的子集和。每个子集的长度是原子集的一半。通常是将一个数列分为偶数序列ej-1和奇数序列oj-1,即
Split (sj) = (ej-1, oj-1 )
其中,ej-1 = { ej-1, k = sj, 2 k },oj-1 = { oj-1, k = sj, 2 k +1}。
(2) 预测
预测(Predict)是利用偶数序列和奇数序列之间的相关性,由其中一个序列(一般是偶序列ej-1)来预测另一个序列(一般是奇序列oj-1)。实际值oj-1与预测值P (ej-1)的差值dj-1反映了两者之间的逼近程度,称之为细节系数或小波系数,对应于原信号sj的高频部分。一般来说,数据的相关性越强,则小波系数的幅值就越小。如果预测是合理的,则差值数据集dj-1所包含的信息比原始子集oj-1包含的信息要少得多。预测过程如下:
dj-1 = oj-1 – P (ej-1)
其中,预测算子P可用预测函数Pk来表示,函数Pk可取为ej-1中的对应数据本身:
Pk (ej-1, k ) = ej-1, k = sj, 2 k
或ej-1中的对应数据的相邻数据的平均值:
Pk (ej-1) = (ej-1, k + ej-1, k+1) / 2 = (sj, 2 k + sj, 2 k +1) / 2
或其他更复杂的函数。
(3) 更新
经过分裂步骤产生子集的某些整体特征 (如均值)可能与原始数据并不一致,为了保持原始数据的这些整体特征,需要一个更新(Update)过程。将更新过程用算子U来代替,其过程如下:
sj-1 = ej-1 + U (d j-1)
其中,sj-1为sj的低频部分;与预测函数一样,更新算子也可以取不同函数,如
U k (dj-1) = dj-1, k / 2
或
U k (dj-1) = (dj-1, k -1 + dj-1, k) / 4 + 1 / 2。
P与U取不同的函数,可构造出不同的小波变换。
2) 分解与重构
经过小波提升,可将信号sj分解为低频部分sj-1和高频部分dj-1;对于低频数据子集sj-1 可以再进行相同的分裂、预测和更新,把sj-1 进一步分解成dj-2和 sj-2;…;如此下去,经过n次分解后,原始数据sj的小波表示为 {sj-n, dj-n, dj-n+1, …, dj-1}。其中sj-n代表了信号的低频部分 ,而{dj-n, dj-n+1, …, dj-1}则是信号的从低到高的高频部分系列。
每次分解对应于上面的三个提升步骤——分裂、预测和更新:
Split (sj) = (ej-1, oj-1 ),dj-1 = oj-1 – P (ej-1),sj-1 = ej-1 + U (d j-1)
小波提升是一个完全可逆的过程,其反变换的步骤如下:
ej-1 = sj-1 - U (d j-1 ),oj-1 = dj-1 + P (ej-1),sj = Merge (ej-1, oj-1 )
下图是用提升方法进行小波分解和重构的示意图。
分解的三个步骤可以用替代的方式来计算:先将奇数序列更新 (用偶数序列预测奇数序列),然后用更新的奇数序列更新偶数序列。大致过程如下:
Split (sj) = (ej-1, oj-1 ),oj-1 -= P (ej-1 ),ej-1 += U (oj-1)
其反变换过程也可以用替代的方式来计算:
ej-1 -= U (oj-1),oj-1 += P (ej-1 ),sj = Merge (ej-1, oj-1 )
4)例子
(1) 线性Haar小波变换
取预测函数
Pk (ej-1) = ej-1, k = sj, 2k
更新函数
Uk (d j-1) = dj-1, k / 2
则得到线性Haar小波变换。
分解式如下:
Split (sj) = (ej-1, oj-1 )
d j-1, k = oj-1, k – Pk (ej-1) = oj-1, k – ej-1, k = sj, 2k+1 - sj, 2k
sj-1, k = ej-1, k + Uk (d j-1) = sj, 2k + dj-1, k / 2 = (sj, 2k+1 + sj, 2k) / 2
重构式如下:
ej-1, k = sj-1, k - Uk (d j-1) = sj-1, k – dj-1, k / 2
oj-1, k = d j-1, k + Pk (ej-1) = d j-1, k + ej-1, k
sj = Merge (ej-1, oj-1 )
(2) 线性小波变换
取预测函数
Pk (ej-1) = (ej-1, k + ej-1, k+1) / 2 = (sj, 2k + sj, 2k +2) / 2
更新函数
Uk (d j-1) = (dj-1, k -1 + dj-1, k) / 4
则得到线性小波变换。
分解式如下:
Split (sj) = (ej-1, oj-1 )
d j-1, k = oj-1, k – Pk (ej-1) = oj-1, k – (ej-1, k + ej-1, k+1) / 2 = sj, 2k+1 - (sj, 2k + sj, 2k +2) / 2
sj-1, k = ej-1, k + Uk (d j-1) = sj, 2k + (dj-1, k -1 + dj-1, k) / 4
重构式如下:
ej-1, k = sj-1, k - Uk (d j-1) = sj-1, k – (dj-1, k -1 + dj-1, k) / 4
oj-1, k = d j-1, k + Pk (ej-1) = d j-1, k + (ej-1, k + ej-1, k+1) / 2
sj = Merge (ej-1, oj-1 )
实际上,提升算法是一种改善快速小波变换的方法。单步的提升算法并不能用于所有的小波构造过程,事实上只有一些特殊的小波变换很容易用它构造,比如双正交小波。不过,涉及有限滤波器(FIR)的所有小波或子带变换可用多个提升步骤来构造。Daubechies和 Sweldens等已经证明,借助于因子化小波变换,所有小波的构造都能够用提升模式实现。
l 整数小波变换
可以用提升方法来构造具紧支集的双正交小波,那么就可以通过对每一次滤波后的数据进行取整(用[·]表示)来实现整数小波变换,而且这种变换是完全可逆的,也就是完全重构数据。
Sweldens已经证明在提升的基础上可以进行整数集到整数集的小波变换,也就是说,一个整数集合通过小波变换得到的仍然是整数集合。这就给数字图象的压缩编码带来了好处,由于不需要对变换后的系数进行量化,因此提供了实现无损压缩的可能。
下面试几个典型的整数小波变换的例子:
1) S变换
最简单的整数小波变换是S变换(S transform, S = sequential),它是线性Haar小波变换的近似整数形式。
分解式如下:
d j-1, k = sj, 2k +1 - sj, 2k
sj-1, k = sj, 2k + [dj-1, k / 2]
相当于对原更新函数取整。
重构式如下:
sj, 2k = sj-1, k - [dj-1, k / 2]
sj, 2k +1 = d j-1, k + sj, 2k
2)S+P变换
S变换之后,在低通系数sj-1, k的基础上进行线性预测,以产生新的高通系数d j-1, k ,这就是S+P变换族(S+P family of transform , S+P = sequential plus prediction)。分解式如下:
sj-1, k = sj, 2k + [ vk / 2]
d j-1, k = vk + [tk + 1/2]
其中
vk = sj, 2k +1 - sj, 2k
tk =α-1 (sj-1, k -2 - sj-1, k -1) +α0 (sj-1, k -1 - sj-1, k ) +α1 (sj-1, k - sj-1, k +1) +β-1 v k +1
例如,取参数如下表所示。
| 变换 |
α-1 |
α0 |
α1 |
β-1 |
| S |
0 |
0 |
0 |
0 |
| 2/6 |
0 |
1/4 |
1/4 |
0 |
| B |
0 |
1/4 |
3/8 |
1/4 |
| C |
-1/16 |
1/4 |
1/2 |
3/8 |
其中
(1)S变换:
sj-1, k = sj, 2k + [ vk / 2] = sj, 2k + [(sj, 2k +1 - sj, 2k) / 2]
d j-1, k = vk = sj, 2k +1 - sj, 2k
其分解与重构式同上1)。
(2)2/6变换:
分解:
sj-1, k = sj, 2k + [ vk / 2] = sj, 2k + [(sj, 2k +1 - sj, 2k) / 2]
d j-1, k = vk + [(sj-1, k -1 - sj-1, k ) / 4 + (sj-1, k - sj-1, k +1) / 4 +1/2]
= (sj, 2k+1 - sj, 2k) +[(sj-1, k -1 - sj-1, k +1) / 4 + 1/2]
即:
vk = sj, 2k +1 - sj, 2k
sj-1, k = sj, 2k + [ vk / 2]
d j-1, k = vk + [(sj-1, k -1 - sj-1, k +1) / 4 + 1/2]
重构:
uk = [(sj-1, k -1 - sj-1, k +1) / 4 + 1/2]
sj, 2k = [(2 sj-1, k - d j-1, k + uk ) / 2] ?
sj, 2k +1 = sj, 2k + d j-1, k - uk
3)5/3变换
d j-1, k = sj, 2k +1 - [(sj, 2k +2 - sj, 2k) / 2]
sj-1, k = sj, 2k + [(dj-1, k + dj-1, k -1) / 4 + 1/2]
4)9/7-M变换
d j-1, k = sj, 2k +1 - [((sj, 2k +4 + sj, 2k -2) – 9 (sj, 2k +2 + sj, 2k)) / 16 + 1/2]
sj-1, k = sj, 2k + [(dj-1, k + dj-1, k -1) / 4 + 1/2]
小波变换与傅里叶变换
如果有人问我,如果傅里叶变换没有学好(深入理解概念),是否能学好小波。答案是否定的。如果有人还问我,如果第一代小波变换没学好,能否学好第二代小波变换。答案依然是否定的。但若你问我,没学好傅里叶变换,能否操作(编程)小波变换,或是没学好第一代小波,能否操作二代小波变换,答案是肯定的。
一、基的概念
我们要明确的是基的概念。两者都是基,信号都可以分成无穷多个他们的和(叠加)。而展开系数就是基与信号之间的内积,更通俗的说是投影。展开系数大的,说明信号和基,是足够相似的。这也就是相似性检测的思想。但我们必须明确的是,傅里叶是0-2pi标准正交基,而小波是-inf到inf之间的基。因此,小波在实轴上是紧的。而傅里叶的基(正弦或余弦),与此相反。而小波能不能成为Reisz基,或标准稳定的正交基,还有其它的限制条件。此外,两者相似的还有就是PARSEVAL定理。(时频能量守恒)。
二、离散化的处理
傅里叶变换,是一种数学的精妙描述。但计算机实现,却是一步步把时域和频域离散化而来的。第一步,时域离散化,我们得到离散时间傅里叶变换(DTFT),频谱被周期化;第二步,再将频域离散化,我们得到离散周期傅里叶级数(DFS),时域进一步被周期化。第三步,考虑到周期离散化的时域和频域,我们只取一个周期研究,也就是众所周知的离散傅里叶变换(DFT)。这里说一句,DFT是没有物理意义的,它只是我们研究的需要。借此,计算机的处理才成为可能。
下面我们谈谈小波。所有满足容许性条件(从-INF到+INF积分为零)的函数,都可以成为小波。小波作为尺度膨胀和空间移位的一组函数也就诞生了。但连续取值的尺度因子和平移因子,在时域计算量和频域的混叠来说,都是极为不便的。用更为专业的俗语,叫再生核。也就是,对于任何一个尺度a和平移因子b的小波,和原信号内积,所得到的小波系数,都可以表示成,在a,b附近生成的小波,投影后小波系数的线性组合。这就叫冗余性。这时的连续小波是与正交基毫无关系的东西,它顶多也只能作为一种积分变换或基。但它的显微镜特点和相似性检测能力,已经显现出来了。为了进一步更好的将连续小波变换离散化,以下步骤是一种有效方法。第一步,尺度离散化。一般只将a二进离散化,此时b是任意的。这样小波被称为二进小波。第二步,离散b。怎么离散化呢?b取多少才合适呢?于是,叫小波采样定理的东西,就这样诞生了。也就是小波平移的最小距离(采样间隔),应该大于二倍小波基的最高频率(好像类似,记不清了)。所以b取尺度的整数倍就行了。也就是越胖的小波,对应频谱越窄,平移量应该越大,采样间隔越大。当然,第一二两步的频域理解,即在满足频域窗口中心是3倍的频域窗口半径的前提下,频域就在统计上是完美二分的。(但很多小波满足不了这个条件,而且频域窗口能量不集中,所以只是近似二分的)。这时的小波变换,称为离散二进小波变换。第三步,引入稳定性条件。也就是经过变换后信号能量和原信号能量有什么不等式关系。满足稳定性条件后,也就是一个小波框架产生成了可能。他是数值稳定性的保证。一个稍弱的稳定条件,就是0
三、快速算法
如果说现代数字信号处理革命的算法,甚至是很多快速算法的老始祖,或者是满矩阵向量乘法一个几乎不可抗拒的最小计算量NlogN,那就是令我不得不佩服的快速傅里叶变换(FFT)。这里我不想解释过多的基2算法,和所谓的三重循环,还有那经典的蝶形单元,或是分裂基之类,我想说的就是一种时频对应关系。也就是算法的来源。我们首先明确,时域的卷积对应频域的相乘,因此我们为了实现卷积,可以先做傅里叶变换,接着在频域相乘,最后再做反傅里叶变换。这里要注意,实际我们在玩DSP。因此,大家要记住,圆周卷积和离散傅里叶变换,是一家子。快速傅里叶是离散傅里叶的快速算法。因此,我们实现离散线性卷积,先要补零。然后使得它和圆周卷积相等。然后就是快速傅里叶变换,频域相乘,最后反快速傅里叶变换。当然,如果我们就需要的是圆周卷积,那我们也就不需要多此一举的补零。这里,我们可以把圆周卷积,写成矩阵形式。这点很重要。Y=AX。这里的A是循环矩阵。但不幸的是A仍然是满阵。
小波的快速算法。MALLET算法,是一个令人振奋的东西。它实质给了多分辨率分析(多尺度分析)一个变得一发而不可收的理由。它实质上,讲了这样一个意思。也就是。我在一个较高的尺度(细节)上作离散二进稳定的小波变换,得到了一个结果(小波系数),我若是想得到比它尺度低的小波系数(概貌),我不用再计算内积,只是把较高尺度的小波系数和低通或高通滤波器卷积再抽取即可。但是,所有这些证明的推导是在整个实轴上进行的。即把信号看成无限长的。但这仍不是我们想要的。还有,我们还必须在较高尺度上作一次内积,才可以使用此算法。因此,我们开始简化,并扩展此理论。第一,我们把信号的采样,作为一个较高层的小波系数近似初始值。(这是可以的,因为小波很瘦时,和取样函数无异)。第二,我们把原来的卷积,换为圆周卷积。这和DSP何尝不一样呢?他的物理意义,就是把信号作周期延拖(边界处理的一种),使之在整个实轴上扩展。这种算法令我为之一贯坚持的是,它是完全正交的,也就是说是正交变换。正变换Y=AX;反变换X=A’Y;一般对于标准正交基,A’是A的共轭转置,对于双正交A’是A的对偶矩阵。但不管如何,我们可以大胆的写,AA’=A’A=I。这里I是单位矩阵。
那怎样操作才是最快的呢?我们来分析A的特点,首先A是正交阵,其次A是有循环矩阵特点,但此时A上半部分是由低通滤波器构成的循环子矩阵,下半部分是由高通滤波器构成的子矩阵,但却是以因子2为循环的。为什么,因为你做了2抽取。所以我们可以,实现小波变换用快速傅里叶变换。这时如果A是满阵的,则复杂度由O(N.^2)下降到O(NlogN)。(这个程序我已经传在了研学上,在原创区)。但还有一点,我们忘了A是稀疏的,因为信号是很长的,而滤波器确实很短的,也就是这个矩阵是个近似对角阵。所以,快速傅里叶是不快的,除非你傻到含有零的元素,也作了乘法。因此,小波变换是O(N)复杂度的。这是它的优势。但要实现,却不是那么容易,第一个方法,稀疏矩阵存储和稀疏矩阵乘法。第二个方法,因子化。因子化,是一个杰出的贡献。它在原有的O(N)的复杂度基础上,对于长滤波器,又把复杂度降低一半。但量级仍然是O(N)。
四、时频分析
对于平稳信号,傅里叶再好不过了。它反映的是信号总体的整个时间段的特点。在频率上,是点频的。而对于非平稳信号,它就无能为力了。而小波恰好对此派上用场。小波是反映信号,某个时间段的特点的。在频域上,是某个频率段的表现。但小波,作为频谱分析确实存在很多问题。但我们确实可以做出很多的小波满足这个特点。大家可以看冉启文的《小波变换与分数傅里叶变换》书,这里我不再赘述。还有,我们老是说小波是近似频域二分的,这在DSP上是怎样的,最近我也在思考。
五、压缩、消噪、特征提取
傅里叶变换的压缩,已经广泛应用了。它的简化版本就是DCT变换。而小波包的提出,也就使DCT有些相形见拙。首先,它提出代价函数,一般就是熵准则。其次,一个自适应树分解。再次,基于矩阵范数或较少位编码的稀疏化策略。这些使小波包的压缩近乎完美。小波包是从频域上实现的。从时域上,我们也可采用类似的分裂和并算法,来实现信号最优的表达,这种可变窗小波成为MALVAR小波。记住,压缩是小波最大的优势。
消噪,一般的傅里叶算法,一般可以是IIR滤波和FIR滤波。两者各有优缺点。而小波的消噪,一般也是由多层分解和阈值策略组成。我们需要的是信号的特点,噪声的特点,然后确定用不用小波,或用什么小波。这点上,小波的优势并不是很明显。
特征提取。这是小波的显微镜特点很好地运用。利用模极大值和LIPSCHITZ指数,我们可以对信号的突变点做分析。但这里面的问题也是很多。首先,在不同尺度上,噪声和信号的模极大值变化不同。再次,一般我们用求内积方法,求模极大值,而不用MALLET算法,或者改用叫多孔算法的东西来做。这点,我没任何体会,希望大家多讨论吧。
这里,我不能谈应用很多的细节。但我们必须明确:1。你要对小波概念有着明确的理解。对诸如多分辨率,时频窗口与分析,框架,消失矩,模极大值,LIPSCHITZ指数等有着清醒地认识。2。你必须考虑小波在此问题上的可行性,这点尤为重要,小波不是万能的。
小波函数与尺度函数的关系,框架,低频粗略部分和高频细节部分
看看多尺度(多分辨)分析部分的内容
尺度函数可以用来生成小波函数,有的人称之为父小波函数
尺度函数和小波函数分别是尺度空间(近似空间)和细节空间的基函数,两者通过双尺度方程联系
以多尺度分析或者多分辨分析为例。尺度函数一般是整个框架的生成元,它生成整个框架,也生成小波函数,另外,尺度函数的傅立叶变换一般可做低通滤波器,而小波函数的傅立叶变换一般是用作带通或高通滤波器!
可以通过尺度函数来构造小波函数,这是构造小波函数的一种方法,两者通过双尺度方程相联系,但是,并不是说每一种小波函数都有相应的尺度函数,有的小波是没有对应的尺度函数的。
其实就我自己理解的话,框架就是一套对信号进行小波分解的方法,它就像一个固定的模式。比如多分辨分析,它所构造的小波分析框架就是把信号分解成一个个互相不交叉的子频带,但所有的子频带的直和又是信号的频带,如果尺度函数选得好,各个子空间还可以是正交的(好像是这样)!
尺度函数和小波函数构成j+1空间,也就是V空间中尺度函数的正交补,
框架是比正交基更广的一个概念,打个比喻,一个平面直角坐标系,x、y轴就是坐标系的正交基,它们是相互垂直的,而框架则不一定垂直,例如夹角为120度的三个向量就构成了坐标系的一个框架。
正交基只是框架中的一个特例。
不知我这样理解对不对,大家指正
尺度函数又称为小波父函数.根据双尺度方程,可以由尺度函数生成小波.进行信号处理时,先要对信号进行副近.也就是用尺度函数对信号进行分解.尺度函数的频带与待分析信号的频带相同,然后将逼近函数分别在尺度空间和小波空间中进行分解.就得到了信号的低频粗略部分和高频细节部分.此时新的尺度函数频带是原信号频带的一半.小波函数的频带是另一半(高频部分).由此实现了对原信号的按频带分解!
这个问题不好说,简单的说你得从小波的多分辨率分析开始理解,多分辨率分析又得从映射来理解,映射又得从向量的投影来理解,所以我就从向量的投影来说:假设是在三维空间里表达一个向量,我们需要建立一个三维的坐标系,只要坐标系建立我们就可以用三个点(x,y,z)来简单的表示一个向量,同样的在一个信号我们设为f(t),要想表示它,我们可以用一个个正交的简单函数来构建坐标系,然后将f(t),映射与这些简单的正交函数上,产生一个系数,这些系数我们就可以等同于(x,y,z),只是由于它的维数是超过3维的所以你不好想象,总之就是利用相互正交的简单函数,构建一个表达信号的空间“坐标系”,然后就可以用这些系数和正交函数来表示f(t),
借就是小波的核心思想,在小波分析中这个构建坐标系的函数,就是小波函数,但是在小波函数来表示一个信号的时候,它其实是将信号映射在了时频平面内的,这里面就有一个问题,在实现过程中需要对需要一个频域的底座和平台,来让信号f(t)与之做映射后是在一定的频率分辨率上进行的,这个起到底座的函数就是尺度函数,在尺度函数的平台下对频率的分析,或者说对信号的f(t)的表达就是在小波函数的作用了。在滤波实现中低频滤波就相当于尺度函数的作用,小波函数的实现就是高频滤波器的使用。
从小波分解的近似系数和细节系数能看出什么信息?
1 间断点检测
2 波形未来发展趋势检测
3 各分量信号的频率识别
4分离信号
etc.
比如说间断点检测,间断点有两种类型,在信号某点处有跃变和一阶导数有跃变。当你用小波对信号分解后,就能从分解的粗节和细节的某一层中看出跃变点的位置了。在探测第二类间断点时,要用具有正则性的小波。
你可以看下<
(一)傅立叶变换:
(1)感觉学习小波最大的困难就在于充分地去理解那些公式背后的意义,由于知识背景上的差异,同一个公式不同的人得到的信息量是不一样的。就拿最普通的内积公式来说,< f, g>=……,最初接触是用来刻画信号之间的相关性,两个信号内积归一化后就得到相关系数,也就是两个信号越相似,内积就越大,这是第一个理解;然后我们会在Hilbert空间里看到这个东西,用来刻画两个向量的夹角,当内积为0时,两个向量正交,若g为Hilbert空间里的正交基的时候,内积为f向基上的正交投影,这是第二个理解;(Hilbert空间是一个很直观的空间,我一直都理解为欧氏空间去理解定义在其上的东西,L^2和l^2同样为Hilbert空间)。
(2)接下来不得不提的就是基和框架的概念:
基的概念大家都有,也很常见,只是很少涉及到数学的严格性,大家都知道颜色的RGB分解法,其实就是基的一种表示,取定RGB各自的比重就可以条配出任何一种颜色,信号和函数的表达也是如此。人们一直渴望找到一组基来表示所有信号,从三角基,DCT,小波,脊波,曲波,基越来越复杂,表示能力也越来越强,当然计算复杂度也大幅度增加,似乎这已经逐渐成为一个不可调和的矛盾,好在计算机的能力也在按摩尔定律增长。
基具有非冗余性,即使基不是正交的,有相关性,但若去掉其中任何一个,则不成为基,这一点也叫完备性;基的表示有唯一性,即给定一族基对一个函数的表达是唯一的;一般情况下基非正交,也称为为exact frame(Resize basis),这个时候要表示信号可以将基正交化成唯一的正交基(对偶为其自身);也可以求其对偶框架(dual frame),其对应了小波变换中的双正交情形!信号可以依框架分解,然后用对偶框架重构。
若在基集里添加一些新的向量,并随意调整空间位置,则有可能成为框架。把函数与基或框架作内积,也可以说成是一种函数空间到系数空间的变换。若某种变换后的能量(内积的平方和度量)仍然有一个大于0的上下界,才可以成为框架,由于框架的冗余性,所以系数的表达也不具有唯一性。若上下界相等,则为紧框架,且界表示冗余度。若上下界相等为且为1,称为pasval identity frame,此时不一定为正交基(想象把一组正交基中某一个拆成两个同方向的基之和,则pasval identity仍然成立),此时若加上基的长度均为一的条件,则框架退化为正交基。可能你会问我们用基来表示信号就行了啊,为什么还要框架呢?其实很多信号表示方法不能构成基,却能构成框架,如短时傅立叶变换中如要求窗函数满足基条件,则可推出该函数有很差的时频局部化性质(事实上退化为了傅立叶变换),框架的冗余性为我们提供了很多自由度,如果有时间的话会专门写一篇框架应用的总结。
(3)傅立叶变换
傅立叶变换将函数投影到三角波上,将函数分解成了不同频率的三角波,这不能不说是一个伟大的发现,但是在大量的应用中,傅立叶变换的局限性却日趋明显,事实上在光滑平稳信号的表示中,傅立叶基已经达到了近似最优表示,但是日常生活中的信号却并不是一直光滑的,而且奇异是平凡的,傅立叶在奇异点的表现就着实让人不爽,从对方波的傅立叶逼近就可以看出来,用了大量不同频率的三角波去逼近其系数衰减程度相当缓慢,而且会产生Gibbs效应。其内在的原因是其基为全局性基,没有局部化能力,以至局部一个小小的摆动也会影响全局的系数。实际应用中很需要时频局部化,傅立叶显然缺乏此能力了。即使如此,由于其鲜明的物理意义和快速计算,在很多场合仍然应用广泛。
傅立叶变换在从连续到离散的情形是值得借鉴与学习的,大家都知道,时间周期对应频域离散,时间离散对应频域周期,时间离散+周期对应频域离散+周期,DFT其实是将离散信号做周期延拓然后做傅立叶变换再截取一个周期,反变换同样如此,所以DFT用的是块基的概念,这样如果信号两端的信号连接后不再光滑(即使两边都光滑),同样会在边界上产生大幅值系数(边界效应),延伸到图像中就是块效应。
当对信号做对称+周期延拓后再做傅立叶变换得到的正弦系数全部为0,也就是任何对称函数可以写成余弦的线性组合,同样按照离散的思路构造得到的是离散块余弦基,即DCT变换,虽然DCT可以通过对称后周期延拓再变换减少了边界效应(两边信号接上了,但不一定平滑),但任不能消除块效应,尤其是图像变换中人为将图像分成8*8处理后块效应更加明显。但是DCT很好的能量聚集效应让人惊奇,加之快速计算方法使它替代DFT成为图像的压缩的标准了很长时间(JPEG)。
(二)短时傅立叶变换到小波变换
三角基的局部化性质这么差,但是很多应用场合又要求比较精确的时频定位,傅立叶的缺点就越来越突出了,窗口傅立叶变换将信号乘上一个局部窗,然后再做傅立叶变换,获得比较好的时频定位特性,再沿时间轴滑动窗口,得到整个时间轴上的频率分布,似乎到这里就应该结束了,因为我们可以把窗设计小点获得较高的时间分辨率,并期望有同样高的频率分辨率,但测不准原理无情的告诉我们,没有这么好的窗能在时间和频率都任意小的,最优的就是gaussian window了(窗的选取还需满足频率域也为窗函数,并不是每个时窗都满足这个条件的)。
通过短时傅立叶变换我们可以画出时频图,但是存在问题:当我们分析频率较高部分信号时应该用更窄的窗,反之用宽窗,但STFT一旦选定窗过后,分辨率就固定了,若要其他分辨率则需要更换窗。接下来用于分析窗函数的平移本身不能构成基,没有简化计算的可能性,使得时频分析的计算量一直很大(若为正交基,系数的计算相当方便)。另外一个问题:由于时间和频率都使用连续表达,连续窗口傅立叶变换具有极大的冗余性,怎样去离散时间和频率参数以减少冗余,而又不导致信息丢失,一个明显的要求就是时频盒子一致时间和频率平移必须完全覆盖整个时频平面。由前面的框架分析可以得知,离散窗口调制不能成为基,但可构成框架(时频采样密度大于临界值,即盒子的有效铺叠刚好邻接并充满整个时频空间),并当时频采样密度为临界采样率一半的时候(盒子有大量重叠),框架差不多是紧的,并可证实冗余因子为4。
针对短时傅立叶变换的第一个问题,马上想到我们能不能用一个窗函数的伸缩(S)和平移(以前只有平移b)来分析信号,要求这个变换是可以完全重构的且保持能量守恒,如果存在,这样的窗函数应满足什么条件呢?答案当然是能,这个窗函数就是连续小波,其应满足容许条件即可达到完全重构。容许条件暗含该函数在0点的傅立叶变换为0,这也解释了小波为什么必须有零值平均。由重构公式可以看到尺度s的积分范围为(-inf,+inf),而我们分析一般只取(1,So)对于大于So以上的信息(对应实际应用的过高频率),我们认为已经不重要了,予以丢弃也不会对我们的分析造成太大的影响,对于尺度小于等于1的信息(低频成分),我们需要对其截断保留,以便恢复信号。这可通过引入尺度函数(低通滤波)来做到。这样连续小波变换就得到一个在不同尺度和不同时间的系数图,系数较大的地方说明信号在该时间与该尺度的窗有很大的相似性(由变换公式和前面提到的内积的含义可知)。这样我们就可以根据系数图来分析信号的特性了。
但是连续小波变换存在很大的冗余性,事实上由连续小波变换的模极大值就可完全稳定重构信号(mallat的模极大迭代投影重构),很自然就就可以想到对尺度和平移的离散,这一想法导致了小波框架,离散要求满足时频窗完全覆盖整个时频平面,Daubechies提供了在给定离散参数s和b的情况下估计小波框架的上下界的定理,在满足一定条件的小波函数和一定离散参数选择下,框架界可近似达到1(当为二进离散正交基时为1),即最大程度上消除了冗余性,此即二进离散小波;但是此举将小波的(任意)平移不变性去掉了(信号平移与采样网格未必一致),即信号移动后再做小波变换后系数发生了很大的变化。如果想保持小波的平移不变性,可以只对尺度进行离散化但平移参数不离散,取尺度序列为二进序列{2^j}即为具有平移不变性的二进小波变换,但得到一个高冗余度的信号表示(时间未被离散)。怎样继续较少冗余而又保持平移不变性呢?这就要求将采样网格自适应地作与信号相同的平移,也就是信号的平移必须以采样网格为参考。后面我们看到非抽取小波变换在离散了平移参数情况仍然保持了平移不变性,这是因为信号和小波均离散化后采样网格与信号平移是一致的。
注:在对离散二进小波做重构的时候,需要求其对偶框架,而不是用离散二进小波框架本身来做重构(双正交情形,参看框架部分),但是框架为二进离散正交小波时,对偶为其自身。
到这里,短时傅立叶分析中存在的毛病在这里已经全部解决了,新问题产生了,满足允许条件的离散二进小波怎么构造,其对偶框架又怎么获得,理论上非正交二进小波有无穷多对偶,这带来的是不确定性还是灵活性?幸而MRA和完全重构滤波器组理论为二进(正交)小波提供了构造方法和快速实现。
在MRA分析出现以前,滤波器组与小波理论是没有融合到一起的,没有人注意到完全重构滤波器中的HG的某种迭代竟是小波的构造和变换的快速实现方法,以至于小波和完全重构滤波器的构造走在两条不相干的路上。最简单的Harr小波因为其连续性太差得不到好的应用,Meyer试图证明光滑连续的小波不存在,却意外的得到了具有一定衰减性的光滑函数,其二进伸缩和平移构成了L^2空间的标准正交基! Mallat于同年提出了多分辨分析,为小波的构造提供了统一框架,并提供了函数分解与重构的快速算法。
(三)MRA(多分辨分析)
我们先来考虑下任何函数的二进网格采样f(2^j*t),随着j的增大,采样网格越来越密,由采样值重构函数的空间也越来越大(频域范围越来越大),可以想象当j趋于+inf时,L^2中的任何函数都可以由其采样值重构。j趋于-inf时,这个空间只能包含零空间。直观理解f(2^j*t)就是在分辨率j上的逼近,也可以理解成f(t)在空间Vj上的正交投影。
注:可以这样想象,每个采样点是空间中的一个坐标轴,Vj就是由这些坐标轴张成的一个空间,j每增大一次,坐标轴就越来越多,坐标张成的空间也越来越大,且原来的坐标轴也包含在更大的空间里面,一般的连续函数f是在一个很大的空间里面的,这样把f向Vj垂直投影,得到的是在Vj空间上对函数的最佳逼近,可以拿三维的情况想象,再进行扩展。
若Vj空间的有以下几个性质,就称为MRA:
a)属于Vj的函数随网格平移仍属于Vj。(这个条件暗含了平移不变性)
b)空间是随j的增大二进膨胀的且严格包含(一个比一个大,且逐层包含),表明Vj-1的信息完全包含在Vj中且比Vj包含信息要少
c)若f(t)属于Vj,则f(2t)属于Vj+1,
d)j趋于+inf,Vj能逼近属于L^2的所有函数,j趋于-inf时,Vj丢失所有细节信息,成为零空间。
e)V0存在riesz基{m(t –n)},即属于V0的f都可以由{m(t –n)}线性组合构成。
则称m为尺度函数,并称m生成了一个多分辨分析{Vj}。可以预见,不同的m张成的多分辨分析性质是不一样的,如由Haar函数张成的空间连续性非常差(分段线性函数空间),用这个空间去逼近连续函数的效果是很差的。理所当然想找到好的m使得张成的空间有更好的性质,更适合逼近一般的函数。
前面的讨论要求我们构造小波函数,使其二进伸缩平移函数族构成L^2的一组基。怎么构造呢?在MRA背景下,我们可以先找到V0的riesz基{m(t –n)}(可以证明Vj空间的riesz基是{2^(j/2)*m(2^j*t –n)})。MRA框架下,Vj是一系列嵌套且随j不断(二进)膨胀的空间,Vj与Vj-1的差空间记为Wj-1空间,很显然,Wj-1空间的任何函数(包括基)可由Vj的基构成,这样,我们就找到了每个Wj空间的基,把所有Wj空间的基合起来就构成了整个L^2的Riesz基(而且不同空间的Wj是正交的,空间不相交)。实际上,我们一般从V0开始,把V0的基和的Wj(j>0)空间的基合起来作为L^2空间的Riesz基。
与Vj的基类似,我们当然希望由一个函数g(t)的二进伸缩平移构成整个W空间的基,当然MRA保证了有这样的函数存在,它就是小波函数。如果m(t)二进伸缩平移构成的是V0规范正交基,则可以得到L^2的规范正交基。
由空间的关系和我们的希望可以写出几个关系:
a)Vj中的基函数可以由Vj+1的基线性组合构成(尺度方程)
b)Wj的基函数可以由Vj+1的基线性组合构成(小波方程)
c)不同尺度的小波基是正交的(不同尺度空间分割关系)
d)同一尺度上的小波基与尺度函数是正交的(同一尺度空间分割关系)
e)同一尺度中的不同的基之间是正交的(正交基关系),若无此条件则为双正交情形。
到这里就有两条路摆在面前,一是找尺度函数,然后得到小波函数,迭代求极限可得到尺度函数和小波函数。对于第一条路,我们根据关系(a)找到h,然后由(d)找到g,再由(b)求得小波函数。但是一般情况下可供选择的尺度函数都太少,而且求得的小波函数性质都比较差。
第二条路是滤波器组,通过找到满足条件的h,g,迭代求极限可得到尺度函数和小波函数。
可以说滤波器组完美重构理论为我们提供了小波构造的一般方法。
一维小波多尺度分解及重构的MATLAB实现
MATLAB 小波工具箱提供了以下几个实现一维小波分解和重构的函数[3]:
[C,L] = wavedec(X,N,’wname’),多尺度一维小波分解函数。其中C为分解结构变量,L为个分解结构以及原始信号长度变量,X为原始信号,N为分解层度,’wname’为小波类型。
X = waverec(C,L,’wname’),多尺度一维小波重构函数。其中C,L为多尺度一维小波分解函数WAVEDEC的计算结果。
D = detcoef(C,L,N),一维小波变换细节序列提取函数。其中C,L为多尺度一维小波分解函数WAVEDEC的计算结果。’wname’为小波类型。
A =appcoef(C,L,’wname’,N),一维小波变换近似序列提取函数。其中C,L为多尺度一维小波分解函数WAVEDEC的计算结果。
Y = wrcoef(’type’,C,L,’wname’,N),一维小波系数单支重构函数。其中,当’type’ = ’a’时重构近似序列,当’type’ = ’d’时重构高频系数;C,L,’wname’,N含义同上。
Y = upcoef(’type’,S,’wname’,N),一维系数的直接小波重构函数。其中’type’,’wname’,N含义同上。S为小波分解系数变量。
小波分析是当前应用数学和工程学科中一个迅速发展的新领域,经过近10 年的探索研究,重要的数学形式化体系已经建立,理论基础更加扎实。与Fourier变换相比,小波变换是空间(时间)和频率的局部变换,因而能有效地从信号中提取信息。通过伸缩和平移等运算功能可对函数或信号进行多尺度的细化分析,解决了Fourier变换不能解决的许多困难问题。小波变换联系了应用数学、物理学、计算机科学、信号与信息处理、图像处理、地震勘探等多个学科。数学家认为,小波分析是一个新的数学分支,它是泛函分析、Fourier分析、样调分析、数值分析的完美结晶;信号和信息处理专家认为,小波分析是时间—尺度分析和多分辨分析的一种新技术,它在信号分析、语音合成、图像识别、计算机视觉、数据压缩、地震勘探、大气与海洋波分析等方面的研究都取得了有科学意义和应用价值的成果。
小波(Wavelet)这一术语,顾名思义,“小波”就是小的波形。所谓“小”是指它具有衰减性;而称之为“波”则是指它的波动性,其振幅正负相间的震荡形式。与Fourier变换相比,小波变换是时间(空间)频率的局部化分析,它通过伸缩平移运算对信号(函数)逐步进行多尺度细化,最终达到高频处时间细分,低频处频率细分,能自动适应时频信号分析的要求,从而可聚焦到信号的任意细节,解决了Fourier变换的困难问题,成为继Fourier变换以来在科学方法上的重大突破。有人把小波变换称为“数学显微镜”。
时—频分析
信号分析的主要目的是寻找一种简单有效的信号变换方法,以便突出信号中的重要特性,简化运算的复杂度。大家熟知的Fourier变换就是一种刻画函数空间,求解微分方程,进行数值计算的主要方法和有效的数学工具。它可把许多常见的微分、积分和卷积运算简化为代数运算。从物理意义上理解,一个周期振动信号可看成是具有简单频率的简谐振动的叠加。Fourier展开正是这一物理过程的数学描述(见Fourier 变换一节)。
Fourier变换的特点是域变换,它把时域和频域联系起来,把时域内难以显现的特征在频域中十分清楚地显现出来。频谱分析的本质就是对F(ω)的加工和处理。基于这一基本原理,现代谱分析已研究与发展了多种行之有效的高效、多分辨率的分析算法。
在实际过程中,时变信号是常见的,如语音信号、地震信号、雷达回波等。在这些信号的分析中,希望知道信号在突变时刻的频率成份,显然利用Fourier变换处理这些信号,这些非平稳的突变成份往往被Fourier变换的积分作用平滑掉了。由于,因此,频谱F(ω)的任一频率成份的值是由时域过程f(t)在(-∞,+∞)上的贡献决定的,而过程f(t)在任一时刻的状态也是由F(ω)在整个频域 (-∞,+∞)的贡献决定的。该性质可由δ(t)函数来理解,即时域上的一个冲激脉冲在频域中具有无限伸展的均匀频谱。f(t)与F(ω)间的彼此的整体刻画,不能反映各自在局部区域上的特征。因此,不能用于局部分析。在实际应用中,也不乏不同的时间过程却对应着相同的频谱的例子。
以上我们从各个方面论述了Fourier变换与小波变换的异同。虽然小波变换在某些方面优于Fourier变换,但小波函数的存在性的证明依赖于 Fourier分析,其思想也来源于Fourier分析。更进一步的研究还表明:在处理渐变信号时,Fourier分析或加窗Fourier 分
析更为有效。因此小波分析不能取代Fourier分析,它只是Fourier分析的新发展,与Fourier分析相辅相成。
现在对小波分解层数与尺度的关系作如下解释:
是不是小波以一个尺度分解一次就是小波进行一层的分解?
比如:[C,L]=wavedec(X,N,'wname')中,N为尺度,若为1,就是进行单尺度分解,也就是分解一层。但是W=CWT(X,[2:2:128],'wname','plot')的分解尺度又是从2~128以2为步进的,这里的“分解尺度”跟上面那个“尺度”的意思一样吗?
[C,L]=wavedec(X,N,'wname')中的N为分解层数, 不是尺度,'以wname'是DB小波为例, 如DB4, 4为消失矩,则一般滤波器长度为8, 阶数为7.
wavedec针对于离散,CWT是连续的。
多尺度又是怎么理解的呢?
多尺度的理解: 如将0-pi定义为空间V0, 经过一级分解之后V0被分成0-pi/2的低频子空间V1和pi/2-pi的高频子空间W1, 然后一直分下去....得到 VJ+WJ+....W2+W1. 因为VJ和WJ是正交的空间, 且各W子空间也是相互正交的. 所以分解得到了是相互不包含的多个频域区间,这就是多分辩率分析, 即多尺度分析.
当然多分辨率分析是有严格数学定义的,但完全可以从数字滤波器角度理解它.当然,你的泛函学的不错,也可以从函数空间角度理解.
是不是说分解到W3、W2、W1、V3就是三尺度分解?
简单的说尺度就是频率,不过是反比的关系.确定尺度关键还要考虑你要分析信号的采样频率大小,因为根据采样频率大小才能确定你的分析频率是多少.(采样定理).然后再确定你到底分多少层.
假如我这有一个10hz和50hz的正弦混合信号,采样频率是500hz,是不是就可以推断出10hz和50hz各自对应的尺度了呢?我的意思是,是不是有一个频率和尺度的换算公式?
实际频率=小波中心频率×采样频率/尺度
在小波分解中,若将信号中的最高频率成分看作是1,则各层小波小波分解便是带通或低通滤波器,且各层所占的具体频带为(三层分解)a1:0~0.5 d1: 0.5~1; a2:0~0.25 d2: 0.25~0.5; a3: 0~0.125; d3:0.125~0.25 可以这样理解吗?如果我要得到频率为0.125~0.25的信号信息,是不是直接对d3的分解系数直接重构之后就是时域信息了?这样感觉把多层分解纯粹当作滤波器来用了,又怎么是多分辨分析??怎样把时频信息同时表达出来??
这个问题非常好,我刚开始的时候也是被这个问题困惑住了,咱们确实是把它当成了滤波器来用了,也就是说我们只看重了小波分析的频域局部化的特性。但是很多人都忽略其时域局部化特性,因为小波是变时频分析的方法,根据测不准原理如果带宽大,则时窗宽度就要小。那么也就意味着如果我们要利用其时域局部化特性就得在时宽小的分解层数下研究,也就是低尺度下。这样我们就可以更容易看出信号在该段时间内的细微变化,但是就产生一个问题,这一段的频率带很宽,频率局部化就体现不出来了。
对d3进行单支重构就可以得到0.125-0.25的信号了,当然频域信息可能保存的比较好,
但如果小波基不是对称的话,其相位信息会失真。
小波变换主要也是用在高频特征提取上。
层数不是尺度,小波包分解中,N应该是层数,个人理解对应尺度应该是2^N
小波分解的尺度为a,分解层次为j。如果是连续小波分解尺度即为a。离散小波分解尺度严格意义上来说为a=2^j,在很多书上就直接将j称为尺度,因为一个j就对应者一个尺度a。其实两者是统一的。
现在对小波分解层数与尺度的关系作如下解释:
是不是小波以一个尺度分解一次就是小波进行一层的分解?
比如:[C,L]=wavedec(X,N,'wname')中,N为尺度,若为1,就是进行单尺度分解,也就是分解一层。 但是W=CWT(X,[2:2:128],'wname','plot')的分解尺度又是从2~128以2为步进的,这里的“分解尺度”跟上面那个“尺度”的意思一样吗?
[C,L]=wavedec(X,N,'wname')中的N为分解层数, 不是尺度,'以wname'是DB小波为例, 如DB4, 4为消失矩,则一般滤波器长度为8, 阶数为7.
wavedec针对于离散,CWT是连续的。
多尺度又是怎么理解的呢?
多尺度的理解: 如将0-pi定义为空间V0, 经过一级分解之后V0被分成0-pi/2的低频子空间V1和pi/2-pi的高频子空间W1, 然后一直分下去....得到 VJ+WJ+....W2+W1. 因为VJ和WJ是正交的空间, 且各W子空间也是相互正交的. 所以分解得到了是相互不包含的多个频域区间,这就是多分辩率分析, 即多尺度分析.
当然多分辨率分析是有严格数学定义的,但完全可以从数字滤波器角度理解它.当然,你的泛函学的不错,也可以从函数空间角度理解.
是不是说分解到W3、W2、W1、V3就是三尺度分解?
简单的说尺度就是频率,不过是反比的关系.确定尺度关键还要考虑你要分析信号的采样频率大小,因为根据采样频率大小才能确定你的分析频率是多少.(采样定理).然后再确定你到底分多少层.
假如我这有一个10hz和50hz的正弦混合信号,采样频率是500hz,是不是就可以推断出10hz和50hz各自对应的尺度了呢?我的意思是,是不是有一个频率和尺度的换算公式?
实际频率=小波中心频率×采样频率/尺度
在小波分解中,若将信号中的最高频率成分看作是1,则各层小波小波分解便是带通或低通滤波器,且各层所占的具体频带为(三层分解)a1:0~0.5 d1: 0.5~1; a2:0~0.25 d2: 0.25~0.5; a3: 0~0.125; d3:0.125~0.25 可以这样理解吗?如果我要得到频率为0.125~0.25的信号信息,是不是直接对d3的分解系数直接重构之后就是时域信息了?这样感觉把多层分解纯粹当作滤波器来用了,又怎么是多分辨分析??怎样把时频信息同时表达出来??
这个问题非常好,我刚开始的时候也是被这个问题困惑住了,咱们确实是把它当成了滤波器来用了,也就是说我们只看重了小波分析的频域局部化的特性。但是很多人都忽略其时域局部化特性,因为小波是变时频分析的方法,根据测不准原理如果带宽大,则时窗宽度就要小。那么也就意味着如果我们要利用其时域局部化特性就得在时宽小的分解层数下研究,也就是低尺度下。这样我们就可以更容易看出信号在该段时间内的细微变化,但是就产生一个问题,这一段的频率带很宽,频率局部化就体现不出来了。
对d3进行单支重构就可以得到0.125-0.25的信号了,当然频域信息可能保存的比较好,
但如果小波基不是对称的话,其相位信息会失真。
小波变换主要也是用在高频特征提取上。
层数不是尺度,小波包分解中,N应该是层数,个人理解对应尺度应该是2^N
小波分解的尺度为a,分解层次为j。如果是连续小波分解尺度即为a。离散小波分解尺度严格意义上来说为a=2^j,在很多书上就直接将j称为尺度,因为一个j就对应者一个尺度a。其实两者是统一的。
小波分析于八十年代末取得突破性成就---Daubechies提出结构具有紧支集的光滑小波和Mallat的多分辨率分析及快速小波变换,其发展历史不过十余年。但在这十多年中,有关小波的研究不断取得重大突破,小波分析已经成为目前发展最快和最引人注目的学科之一,几乎涉及或者应用到信息领域的所有学科。小波在其第一应用阶段--八十年代末到九十年代初---取得巨大的成功,因此也促进了人们继续探索其新理论,其中引人注意的是九十年代中期提出的提升方法和多小波理论。提升小波已经被国际标准ISO所采纳,JPEG2000采用的小波变换是完全基于提升方法的。自从构造出第一对称,紧支撑的正交小波--GHM多小波之后,多小波因为其自身的优点吸引了很多学者。
http://guohanwei.51.net/wavelet.htm
傅里叶变换和拉普拉斯变换的意义
傅里叶变换和拉普拉斯变换的意义。在这里我就自己的一些见解,以及结合别人的观点描述如下,希望大家对此有所了解。
傅里叶变换(Transformée de Fourier)在物理学、数论、组合数学、信号处理、概率论、统计学、密码学、声学、光学、海洋学、结构动力学等领域都有着广泛的应用(例如在信号处理中,傅里叶变换的典型用途是将信号分解成幅值分量和频率分量)。
傅里叶变换能将满足一定条件的某个函数表示成三角函数(正弦和/或余弦函数)或者它们的积分的线性组合。在不同的研究领域,傅里叶变换具有多种不同的变体形式,如连续傅里叶变换和离散傅里叶变换。
傅里叶变换是一种解决问题的方法,一种工具,一种看待问题的角度。理解的关键是:一个连续的信号可以看作是一个个小信号的叠加,从时域叠加与从频域叠加都可以组成原来的信号,将信号这么分解后有助于处理。
我们原来对一个信号其实是从时间的角度去理解的,不知不觉中,其实是按照时间把信号进行分割,每一部分只是一个时间点对应一个信号值,一个信号是一组这样的分量的叠加。傅里叶变换后,其实还是个叠加问题,只不过是从频率的角度去叠加,只不过每个小信号是一个时间域上覆盖整个区间的信号,但他确有固定的周期,或者说,给了一个周期,我们就能画出一个整个区间上的分信号,那么给定一组周期值(或频率值),我们就可以画出其对应的曲线,就像给出时域上每一点的信号值一样,不过如果信号是周期的话,频域的更简单,只需要几个甚至一个就可以了,时域则需要整个时间轴上每一点都映射出一个函数值。
傅里叶变换就是将一个信号的时域表示形式映射到一个频域表示形式;逆傅里叶变换恰好相反。这都是一个信号的不同表示形式。它的公式会用就可以,当然把证明看懂了更好。
对一个信号做傅立叶变换,可以得到其频域特性,包括幅度和相位两个方面。幅度是表示这个频率分量的大小,那么相位呢,它有什么物理意义?频域的相位与时域的相位有关系吗?信号前一段的相位(频域)与后一段的相位的变化是否与信号的频率成正比关系。
傅立叶变换就是把一个信号,分解成无数的正弦波(或者余弦波)信号。也就是说,用无数的正弦波,可以合成任何你所需要的信号。
想一想这个问题:给你很多正弦信号,你怎样才能合成你需要的信号呢?答案是要两个条件,一个是每个正弦波的幅度,另一个就是每个正弦波之间的相位差。所以现在应该明白了吧,频域上的相位,就是每个正弦波之间的相位。
傅立叶变换用于信号的频率域分析,一般我们把电信号描述成时间域的数学模型,而数字信号处理对信号的频率特性更感兴趣,而通过傅立叶变换很容易得到信号的频率域特性
傅里叶变换简单通俗理解就是把看似杂乱无章的信号考虑成由一定振幅、相位、频率的基本正弦(余弦)信号组合而成,傅里叶变换的目的就是找出这些基本正弦(余弦)信号中振幅较大(能量较高)信号对应的频率,从而找出杂乱无章的信号中的主要振动频率特点。如减速机故障时,通过傅里叶变换做频谱分析,根据各级齿轮转速、齿数与杂音频谱中振幅大的对比,可以快速判断哪级齿轮损伤。
拉普拉斯变换(Laplace Transform),是工程数学中常用的一种积分变换。
它是为简化计算而建立的实变量函数和复变量函数间的一种函数变换。对一个实变量函数作拉普拉斯变换,并在复数域中作各种运算,再将运算结果作拉普拉斯反变换来求得实数域中的相应结果,往往比直接在实数域中求出同样的结果在计算上容易得多。拉普拉斯变换的这种运算步骤对于求解线性微分方程尤为有效,它可把微分方程化为容易求解的代数方程来处理,从而使计算简化。在经典控制理论中,对控制系统的分析和综合,都是建立在拉普拉斯变换的基础上的。
引入拉普拉斯变换的一个主要优点,是可采用传递函数代替微分方程来描述系统的特性。这就为采用直观和简便的图解方法来确定控制系统的整个特性(见信号流程图、动态结构图)、分析控制系统的运动过程(见奈奎斯特稳定判据、根轨迹法),以及综合控制系统的校正装置(见控制系统校正方法)提供了可能性。
拉普拉斯变换在工程学上的应用:应用拉普拉斯变换解常变量齐次微分方程,可以将微分方程化为代数方程,使问题得以解决。在工程学上,拉普拉斯变换的重大意义在于:将一个信号从时域上,转换为复频域(s域)上来表示;在线性系统,控制自动化上都有广泛的应用。
【标题】多-尺度加细函数及其性质的研究
【作者】杨守志 李继彬(推荐)
【关键词】多-尺度加细函数 伸缩因子 多-尺度加细方程
【刊名】应用数学和力学 2006-27-12
【ISSN】1000-0887
【机构】[1]汕头大学数学系,广东汕头515063 [2]不详
【摘要】引入伸缩因子为α的多-尺度加细函数和平移不变子空间的概念.研究了多-尺度加细方程解存在的条件.特别地,给出这种方程的解是正交的充分必要条件.建立了多-尺度加细函数与两尺度加细函数之间的关系.并讨论了它们的一些性质.最后给出相应的构造算例.
【标题】多-尺度加细函数及其性质的研究
【作者】杨守志[1] 李继彬(推荐)[2]
【关键词】多-尺度加细函数 伸缩因子 多-尺度加细方程
【刊名】应用数学和力学 2006-27-12
【ISSN】1000-0887
【机构】[1]汕头大学数学系,广东汕头515063 [2]不详
【摘要】引入伸缩因子为α的多-尺度加细函数和平移不变子空间的概念.研究了多-尺度加细方程解存在的条件.特别地,给出这种方程的解是正交的充分必要条件.建立了多-尺度加细函数与两尺度加细函数之间的关系.并讨论了它们的一些性质.最后给出相应的构造算例.
【标题】同样对称性质的2重尺度函数及其多小波构造
【作者】唐春明[1] 高协平[2]
【关键词】2重尺度函数 多小波函数 对称性 正交性 紧支撑集 平衡性 滤波器组
【刊名】系统工程与电子技术 2002-24-9
【ISSN】1001-506X
【机构】[1]中国科学院数学与系统科学研究院,北京100080 [2]湘潭大学计算数学与应用研究所,湖南湘潭411105
【摘要】提出了2重尺度函数及其相应多小波的构造步骤。该尺度函数满足如下性质:(1)各分量具有不同的紧支撑区间;(2)各分量对称性相同;(3)正交。得出了不存在各分量满足反对称性的具有实用价值的2重尺度函数的结果。讨论了构造过程中参数与尺度函数及其小波性质的关系,最后根据该类尺度函数及多小波的性质,构造了两种尺度函数和多小波。
【标题】完全分配格上拓扑生成序的加细及其性质
【作者】汪红
【关键词】序 拓扑生成序 完全分配格 加细 共生结构
【刊名】模糊系统与数学 1999-13-4
【ISSN】1001-7402
【机构】绵阳师范高等专科学校数学系
【摘要】在文(1)中,作者建立了完全分配格上的共生结构的一般理论,研究了余拓扑,拟一致和T结构的一致化结构。本文引进了完全分配格L上半拓扑生成序加细的概念,研究了其性质,得到了一系列重要的结论,为进一步研究完全分配格上拓扑共生结构的加细奠定了基础。
曲线设计的几何细分法
细分曲线是通过对初始控制多边形进行重复逼近或插值得到的,提出了一种新的构造曲线的逼近型细分法??曲线设计的几何细分法,该方法用折线割角代替传统的直线割角产生新点和新边,得到的曲线具有保凸性、凸包性等与Bezier方法类似的性质,引入了一些参数来控制细分过程,且参数对曲线形状的影响是局部的,另外,本文中的方法可以用来生成圆,这是Bezier方法所不具备的,当参数在一定范围内取值时,用这种方法可以构造出C1连续的逼近曲线。
Loop细分小波
曲面细分是一种有效的几何造型生成方法.常用的基于三角网格的细分模式有:逼近型的Loop 细分[10]和插值型的Butterfly 细分[9]等.它们都是对三角形进行1-4 面分裂操作,按照不同的规则在粗网格的每条边上增加一个新顶点,逐层加细,在极限情况下分别生成具有C2 和C1 阶光滑的曲面.曲面细分与网格简化有着密切的联系,如图1 所示,网格简化是曲面细分的逆过程,也称逆细分
控制网格的压缩
控制网格仅包含少量的顶点和三角面片, 却包含模型的重要信息, 描述了模型的大致形状。而以下的渐进码流也只能在已知控制网格的条件下才能够正确解码。所以笔者采用了压缩效率高的单码率几何压缩算法[ 2]对其压缩。压缩后得到的基本信息块的数据量很小, 不会对网络带宽造成负担。1. 2 ? 重新网格化与小波变换实际应用中, 大多数的网格是不规则的网格, 需要重新网格化, 转换成半规则网格。半规则网格主要有2 个作用: 一是支持小波变换, 二是模型表达紧凑。文中采用MAPS 方法[ 14] 来重新网格化。
通过小波变换可以将一个多次细分的半规则网格分解成为基网格上的尺度函数系数及一系列的小波系数。文中采用的小波变换为Loop 小波[ 8] 。