STM32F4系统时基使用SysTick还是TIM1
一、SysTick选择时钟源SysTick
1. SysTick选择时钟源SysTick
. 
2. 默认优先级,可以按需修改

3. 自动生成的代码如下
//stm32f4xx_hal_conf.h
#define TICK_INT_PRIORITY ((uint32_t)0U) /*!< tick interrupt priority */
//stm32f4xx_hal_cortx.h
/** @defgroup CORTEX_Preemption_Priority_Group CORTEX Preemption Priority Group
* @{
*/
#define NVIC_PRIORITYGROUP_0 0x00000007U /*!< 0 bits for pre-emption priority
4 bits for subpriority */
#define NVIC_PRIORITYGROUP_1 0x00000006U /*!< 1 bits for pre-emption priority
3 bits for subpriority */
#define NVIC_PRIORITYGROUP_2 0x00000005U /*!< 2 bits for pre-emption priority
2 bits for subpriority */
#define NVIC_PRIORITYGROUP_3 0x00000004U /*!< 3 bits for pre-emption priority
1 bits for subpriority */
#define NVIC_PRIORITYGROUP_4 0x00000003U /*!< 4 bits for pre-emption priority
0 bits for subpriority */
//stm32f4xx_hal_msp.c
void HAL_MspInit(void)
{
/* USER CODE BEGIN MspInit 0 */
/* USER CODE END MspInit 0 */
__HAL_RCC_SYSCFG_CLK_ENABLE();
__HAL_RCC_PWR_CLK_ENABLE();
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);
/* System interrupt init*/
/* MemoryManagement_IRQn interrupt configuration */
HAL_NVIC_SetPriority(MemoryManagement_IRQn, 0, 0);
/* BusFault_IRQn interrupt configuration */
HAL_NVIC_SetPriority(BusFault_IRQn, 0, 0);
/* UsageFault_IRQn interrupt configuration */
HAL_NVIC_SetPriority(UsageFault_IRQn, 0, 0);
/* SVCall_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SVCall_IRQn, 0, 0);
/* DebugMonitor_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DebugMonitor_IRQn, 0, 0);
/* PendSV_IRQn interrupt configuration */
HAL_NVIC_SetPriority(PendSV_IRQn, 0, 0);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
/* USER CODE BEGIN MspInit 1 */
/* USER CODE END MspInit 1 */
}
//stm32f4xx_hal.c
HAL_StatusTypeDef HAL_Init(void)
{
/* Configure Flash prefetch, Instruction cache, Data cache */
#if (INSTRUCTION_CACHE_ENABLE != 0U)
__HAL_FLASH_INSTRUCTION_CACHE_ENABLE();
#endif /* INSTRUCTION_CACHE_ENABLE */
#if (DATA_CACHE_ENABLE != 0U)
__HAL_FLASH_DATA_CACHE_ENABLE();
#endif /* DATA_CACHE_ENABLE */
#if (PREFETCH_ENABLE != 0U)
__HAL_FLASH_PREFETCH_BUFFER_ENABLE();
#endif /* PREFETCH_ENABLE */
/* Set Interrupt Group Priority */
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);
/* Use systick as time base source and configure 1ms tick (default clock after Reset is HSI) */
HAL_InitTick(TICK_INT_PRIORITY);
/* Init the low level hardware */
HAL_MspInit();
/* Return function status */
return HAL_OK;
}
//stm32f4xx_hal.c
/**
* @brief This function configures the source of the time base.
* The time source is configured to have 1ms time base with a dedicated
* Tick interrupt priority.
* @note This function is called automatically at the beginning of program after
* reset by HAL_Init() or at any time when clock is reconfigured by HAL_RCC_ClockConfig().
* @note In the default implementation, SysTick timer is the source of time base.
* It is used to generate interrupts at regular time intervals.
* Care must be taken if HAL_Delay() is called from a peripheral ISR process,
* The SysTick interrupt must have higher priority (numerically lower)
* than the peripheral interrupt. Otherwise the caller ISR process will be blocked.
* The function is declared as __weak to be overwritten in case of other
* implementation in user file.
* @param TickPriority Tick interrupt priority.
* @retval HAL status
*/
__weak HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
/* Configure the SysTick to have interrupt in 1ms time basis*/
if (HAL_SYSTICK_Config(SystemCoreClock / (1000U / uwTickFreq)) > 0U)
{
return HAL_ERROR;
}
/* Configure the SysTick IRQ priority */
if (TickPriority < (1UL << __NVIC_PRIO_BITS))
{
HAL_NVIC_SetPriority(SysTick_IRQn, TickPriority, 0U);
uwTickPrio = TickPriority;
}
else
{
return HAL_ERROR;
}
/* Return function status */
return HAL_OK;
}
4. SysTick函数
//main.c
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
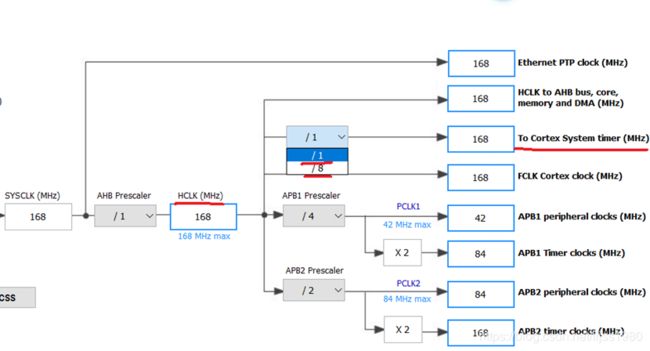
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
//stm32f4xx_hal_cortx.c
uint32_t HAL_SYSTICK_Config(uint32_t TicksNumb)
{
return SysTick_Config(TicksNumb);
}
/**
* @brief Configures the SysTick clock source.
* @param CLKSource specifies the SysTick clock source.
* This parameter can be one of the following values:
* @arg SYSTICK_CLKSOURCE_HCLK_DIV8: AHB clock divided by 8 selected as SysTick clock source.
* @arg SYSTICK_CLKSOURCE_HCLK: AHB clock selected as SysTick clock source.
* @retval None
*/
void HAL_SYSTICK_CLKSourceConfig(uint32_t CLKSource)
{
/* Check the parameters */
assert_param(IS_SYSTICK_CLK_SOURCE(CLKSource));
if (CLKSource == SYSTICK_CLKSOURCE_HCLK)
{
SysTick->CTRL |= SYSTICK_CLKSOURCE_HCLK;
}
else
{
SysTick->CTRL &= ~SYSTICK_CLKSOURCE_HCLK;
}
}
//core_cm4.h
#if (__Vendor_SysTickConfig == 0U)
/**
\brief System Tick Configuration
\details Initializes the System Timer and its interrupt, and starts the System Tick Timer.
Counter is in free running mode to generate periodic interrupts.
\param [in] ticks Number of ticks between two interrupts.
\return 0 Function succeeded.
\return 1 Function failed.
\note When the variable __Vendor_SysTickConfig is set to 1, then the
function SysTick_Config is not included. In this case, the file device.h
must contain a vendor-specific implementation of this function.
*/
__STATIC_INLINE uint32_t SysTick_Config(uint32_t ticks)
{
if ((ticks - 1UL) > SysTick_LOAD_RELOAD_Msk)
{
return (1UL); /* Reload value impossible */
}
SysTick->LOAD = (uint32_t)(ticks - 1UL); /* set reload register */
NVIC_SetPriority (SysTick_IRQn, (1UL << __NVIC_PRIO_BITS) - 1UL); /* set Priority for Systick Interrupt */
SysTick->VAL = 0UL; /* Load the SysTick Counter Value */
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk; /* Enable SysTick IRQ and SysTick Timer */
return (0UL); /* Function successful */
}
#endif
二、SysTick选择时钟源TIM1
1. SysTick选择时钟源TIM1

使用TIM1,只需选择就可以,并不会要用户配置

2. 自动生成的代码会出现“stm32f4xx_hal_timebase_TIM.c”文件
完整代码如下:
//stm32f4xx_hal_conf.h
#define TICK_INT_PRIORITY ((uint32_t)0U) /*!< tick interrupt priority */
//stm32f4xx_hal.c
HAL_StatusTypeDef HAL_Init(void)
{
/* Configure Flash prefetch, Instruction cache, Data cache */
#if (INSTRUCTION_CACHE_ENABLE != 0U)
__HAL_FLASH_INSTRUCTION_CACHE_ENABLE();
#endif /* INSTRUCTION_CACHE_ENABLE */
#if (DATA_CACHE_ENABLE != 0U)
__HAL_FLASH_DATA_CACHE_ENABLE();
#endif /* DATA_CACHE_ENABLE */
#if (PREFETCH_ENABLE != 0U)
__HAL_FLASH_PREFETCH_BUFFER_ENABLE();
#endif /* PREFETCH_ENABLE */
/* Set Interrupt Group Priority */
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);
/* Use systick as time base source and configure 1ms tick (default clock after Reset is HSI) */
HAL_InitTick(TICK_INT_PRIORITY);
/* Init the low level hardware */
HAL_MspInit();
/* Return function status */
return HAL_OK;
}
//stm32f4xx_hal_timebase_TIM.c
/* Includes ------------------------------------------------------------------*/
#include "stm32f4xx_hal.h"
#include "stm32f4xx_hal_tim.h"
/** @addtogroup STM32F7xx_HAL_Examples
* @{
*/
/** @addtogroup HAL_TimeBase
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim1;
uint32_t uwIncrementState = 0;
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/**
* @brief This function configures the TIM1 as a time base source.
* The time source is configured to have 1ms time base with a dedicated
* Tick interrupt priority.
* @note This function is called automatically at the beginning of program after
* reset by HAL_Init() or at any time when clock is configured, by HAL_RCC_ClockConfig().
* @param TickPriority: Tick interrupt priorty.
* @retval HAL status
*/
HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
RCC_ClkInitTypeDef clkconfig;
uint32_t uwTimclock = 0;
uint32_t uwPrescalerValue = 0;
uint32_t pFLatency;
/*Configure the TIM1 IRQ priority */
HAL_NVIC_SetPriority(TIM1_UP_TIM10_IRQn, TickPriority ,0);
/* Enable the TIM1 global Interrupt */
HAL_NVIC_EnableIRQ(TIM1_UP_TIM10_IRQn);
/* Enable TIM1 clock */
__HAL_RCC_TIM1_CLK_ENABLE();
/* Get clock configuration */
HAL_RCC_GetClockConfig(&clkconfig, &pFLatency);
/* Compute TIM1 clock */
uwTimclock = 2*HAL_RCC_GetPCLK2Freq();
/* Compute the prescaler value to have TIM1 counter clock equal to 1MHz */
uwPrescalerValue = (uint32_t) ((uwTimclock / 1000000) - 1);
/* Initialize TIM1 */
htim1.Instance = TIM1;
/* Initialize TIMx peripheral as follow:
+ Period = [(TIM1CLK/1000) - 1]. to have a (1/1000) s time base.
+ Prescaler = (uwTimclock/1000000 - 1) to have a 1MHz counter clock.
+ ClockDivision = 0
+ Counter direction = Up
*/
htim1.Init.Period = (1000000 / 1000) - 1;
htim1.Init.Prescaler = uwPrescalerValue;
htim1.Init.ClockDivision = 0;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
if(HAL_TIM_Base_Init(&htim1) == HAL_OK)
{
/* Start the TIM time Base generation in interrupt mode */
return HAL_TIM_Base_Start_IT(&htim1);
}
/* Return function status */
return HAL_ERROR;
}
/**
* @brief Suspend Tick increment.
* @note Disable the tick increment by disabling TIM1 update interrupt.
* @param None
* @retval None
*/
void HAL_SuspendTick(void)
{
/* Disable TIM1 update Interrupt */
__HAL_TIM_DISABLE_IT(&htim1, TIM_IT_UPDATE);
}
/**
* @brief Resume Tick increment.
* @note Enable the tick increment by Enabling TIM1 update interrupt.
* @param None
* @retval None
*/
void HAL_ResumeTick(void)
{
/* Enable TIM1 Update interrupt */
__HAL_TIM_ENABLE_IT(&htim1, TIM_IT_UPDATE);
}