图像滤波----低通滤波,中值滤波,高通滤波,方向滤波(Sobel),拉普拉斯变换
①观察灰度分布来描述一幅图像成为空间域,观察图像变化的频率被成为频域。
②频域分析:低频对应区域的图像强度变化缓慢,高频对应的变化快。低通滤波器去除了图像的高频部分,高通滤波器去除了图像的低频部分。
(1)低通滤波
①栗子:
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
int main()
{
// Read input image
cv::Mat image= cv::imread("boldt.jpg",0);
if (!image.data)
return 0;
// Display the image
cv::namedWindow("Original Image");
cv::imshow("Original Image",image);
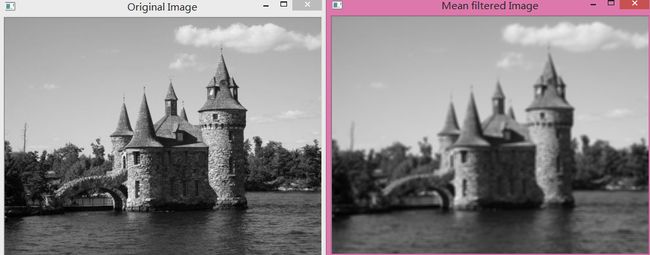
// Blur the image with a mean filter
cv::Mat result;
cv::blur(image,result,cv::Size(5,5));
// Display the blurred image
cv::namedWindow("Mean filtered Image");
cv::imshow("Mean filtered Image",result);结果:每个像素变为相邻像素的平均值, 快速的强度变化转化为平缓的过度
②栗子:近的像素添加更多的权重。:高斯滤波器
cv::GaussianBlur(image,result,cv::Size(5,5),1.5);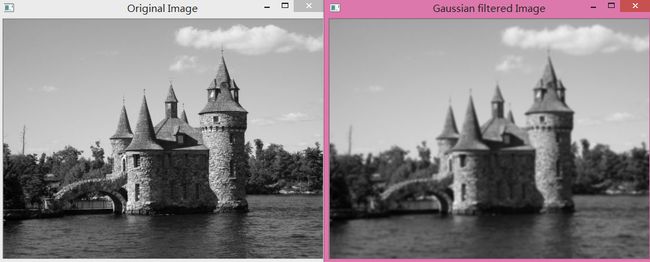
(2)中值滤波 :非线性滤波
有效去除椒盐噪点
cv::medianBlur(image,result,5);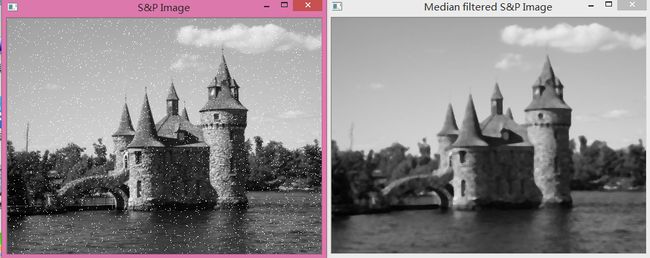
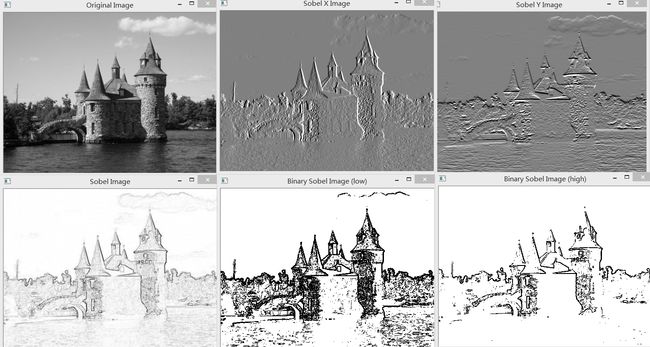
(3)方向滤波(Sobel)
强调图像中的高频分量,使用高通滤波器进行边缘检测。
Sobel算子是一种经典的边缘检测线性滤波器,可被认为是图像在垂直和水平方向变化的测量。
#include 结果:
(4)图像的拉普拉斯变换
是一种基于图像导数的高通线性滤波器,计算二阶倒数已衡量图像的弯曲度。
// Compute Laplacian 3x3
cv::Mat image = cv::imread("boldt.jpg", 0);
cv::Mat laplace;
cv::Laplacian(image,laplace,CV_8U,1,1,128);
// Display the image
cv::namedWindow("Laplacian Image");
cv::imshow("Laplacian Image",laplace);
// Print window pixel values
for (int i=0; i<12; i++) {
for (int j=0; j<12; j++)
std::cout << std::setw(5) << static_cast<int>(laplace.at(i+135,j+362))-128 << " ";
std::cout << std::endl;
}
std::cout << std::endl;
std::cout << std::endl;
std::cout << std::endl;
// Compute Laplacian 7x7
cv::Laplacian(image,laplace,CV_8U,7,0.01,128);
// Display the image
cv::namedWindow("Laplacian Image");
cv::imshow("Laplacian Image",laplace);
// Print window pixel values
for (int i=0; i<12; i++) {
for (int j=0; j<12; j++)
std::cout << std::setw(5) << static_cast<int>(laplace.at(i+135,j+362))-128 << " ";
std::cout << std::endl;
}
// Extract small window
cv::Mat window(image,cv::Rect(362,135,12,12));
cv::namedWindow("Image window");
cv::imshow("Image window",window);
cv::imwrite("window.bmp",window);
// Compute Laplacian using LaplacianZC class
LaplacianZC laplacian;
laplacian.setAperture(7);
cv::Mat flap= laplacian.computeLaplacian(image);
double lapmin, lapmax;
cv::minMaxLoc(flap,&lapmin,&lapmax);
std::cout << "Laplacian value range=[" << lapmin << "," << lapmax << "]\n";
laplace= laplacian.getLaplacianImage();
cv::namedWindow("Laplacian Image (7x7)");
cv::imshow("Laplacian Image (7x7)",laplace);
// Print Laplacian values
std::cout << std::endl;
for (int i=0; i<12; i++) {
for (int j=0; j<12; j++)
std::cout << std::setw(5) << static_cast<int>(flap.at<float>(i+135,j+362)/100) << " ";
std::cout << std::endl;
}
std::cout << std::endl;
// Compute and display the zero-crossing points
cv::Mat zeros;
zeros= laplacian.getZeroCrossings(lapmax);
cv::namedWindow("Zero-crossings");
cv::imshow("Zero-crossings",zeros);
// Compute and display the zero-crossing points (Sobel version)
zeros= laplacian.getZeroCrossings();
zeros= laplacian.getZeroCrossingsWithSobel(50);
cv::namedWindow("Zero-crossings (2)");
cv::imshow("Zero-crossings (2)",zeros);
// Print window pixel values
for (int i=0; i<12; i++) {
for (int j=0; j<12; j++)
std::cout << std::setw(2) << static_cast<int>(zeros.at(i+135,j+362)) << " ";
std::cout << std::endl;
}
// Display the image with window
cv::rectangle(image,cv::Point(362,135),cv::Point(374,147),cv::Scalar(255,255,255));
cv::namedWindow("Original Image with window");
cv::imshow("Original Image with window",image);
cv::waitKey();
return 0;
}
