OpenCV - 图像阈值(Python实现)
- 简单阈值分割
与名字一样,这种方法非常简单。但像素值高于阈值时(大部分情况为127),我们给这个像素
赋予一个新值(可能是白色),否则我们给它赋予另外一种颜色(也许是黑色)。
这个函数就是 cv2.threshhold()。
cv2.threshold (src, thresh, maxval, type)
| 参数 | 解释 |
|---|---|
| src | 源图片,必须是单通道 |
| thresh | 阈值,取值范围0~255 |
| maxval | 填充色,取值范围0~255 |
| type | 阈值类型,见下表 |
| type | 解释 |
|---|---|
| cv2.THRESH_BINARY | 二进制阈值化,非黑即白 |
| cv2.THRESH_BINARY_INV | 反二进制阈值化,非白即黑 |
| cv2.THRESH_TRUNC | 截断阈值化 ,大于阈值设为阈值 |
| cv2.THRESH_TOZERO | 阈值化为0 ,小于阈值设为0 |
| cv2.THRESH_TOZERO_INV | 反阈值化为0 ,大于阈值设为0 |
import cv2
import numpy as np
from matplotlib import pyplot as plt
img=cv2.imread('image.jpg',0)#必须为灰度图,单通道
ret,thresh1=cv2.threshold(img,127,255,cv2.THRESH_BINARY)
ret,thresh2=cv2.threshold(img,127,255,cv2.THRESH_BINARY_INV)
ret,thresh3=cv2.threshold(img,127,255,cv2.THRESH_TRUNC)
ret,thresh4=cv2.threshold(img,127,255,cv2.THRESH_TOZERO)
ret,thresh5=cv2.threshold(img,127,255,cv2.THRESH_TOZERO_INV)
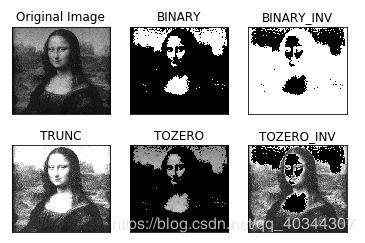
titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in range(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
- 自适应阈值
简单阈值算法使用全局阈值,但一副图像中不同位置的光照情况可能不同,全局阈值会失去很多信息。这种情况下我们需要采用自适应阈值。自适应阈值二值化函数根据图片一小块区域的值来计算对应区域的阈值,从而得到也许更为合适的图片。
dst = cv2.adaptiveThreshold(src, maxval, thresh_type, type, Block Size, C)
| 参数 | 解释 |
|---|---|
| src | 源图片,必须是单通道 |
| dst | 输出图 |
| maxval | 填充色,取值范围0~255 |
| thresh_type | 阈值的计算方法,见下表 |
| type | 阈值类型 |
| Block Size | 图片中分块的大小 |
| C | 阈值计算方法中的常数项 |
| thresh_type | 解释 |
|---|---|
| cv2.ADAPTIVE_THRESH_MEAN_C | 通过平均的方法取得平均值 |
| cv2.ADAPTIVE_THRESH_GAUSSIAN_C | 通过高斯取得高斯值 |
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('image2.jpg',0)
# 中值滤波
img = cv2.medianBlur(img,5)
ret,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
#11 为 Block size, 2 为 C 值
th2 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_MEAN_C,\
cv2.THRESH_BINARY,11,2)
th3 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY,11,2)
titles = ['Original Image', 'Global Thresholding (v = 127)',
'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
images = [img, th1, th2, th3]
for i in range(4):
plt.subplot(2,2,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()

3. Otsu’s 二值化(大津阈值分割法)
Otsu’s 二值化是对一副双峰图像自动根据其直方图计算出一个阈值。(对于非双峰图像,这种方法得到的结果可能会不理想)。这里用到到的函数还是 cv2.threshold(),但是需要多传入一个参数
(flag): cv2.THRESH_OTSU。这时要把阈值设为 0。然后算法会找到最优阈值,这个最优阈值就是返回值 retVal。如果不使用 Otsu 二值化,返回的retVal 值与设定的阈值相等。
Otsu过程:
- 计算图像直方图;
- 设定一阈值,把直方图强度大于阈值的像素分成一组,把小于阈值的像素分成另外一组;
- 分别计算两组内的偏移数,并把偏移数相加;
- 把0~255依照顺序多为阈值,重复1-3的步骤,直到得到最小偏移数,其所对应的值即为结果阈值。
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('image.jpg',0)
# 全局阈值
ret1,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
# Otsu's thresholding
ret2,th2 = cv2.threshold(img,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
# Otsu's thresholding after Gaussian filtering
#(5,5)为高斯核的大小, 0 为标准差
blur = cv2.GaussianBlur(img,(5,5),0)
# 阈值一定要设为 0!
ret3,th3 = cv2.threshold(blur,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
# plot all the images and their histograms
images = [img, 0, th1,
img, 0, th2,
blur, 0, th3]
titles = ['Original Noisy Image','Histogram','Global Thresholding (v=127)',
'Original Noisy Image','Histogram',"Otsu's Thresholding",
'Gaussian filtered Image','Histogram',"Otsu's Thresholding"]
# 这里使用了 pyplot 中画直方图的方法, plt.hist, 要注意的是它的参数是一维数组
# 所以这里使用了(numpy)ravel 方法,将多维数组转换成一维,也可以使用 flatten 方法
#ndarray.flat 1-D iterator over an array.
#ndarray.flatten 1-D array copy of the elements of an array in row-major order.
for i in range(3):
plt.subplot(3,3,i*3+1),plt.imshow(images[i*3],'gray')
plt.title(titles[i*3]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256)
plt.title(titles[i*3+1]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+3),plt.imshow(images[i*3+2],'gray')
plt.title(titles[i*3+2]), plt.xticks([]), plt.yticks([])
plt.show()
