图卷积浅谈 Graph Convolution
图卷积浅谈 Graph Convolution
1.图数据
欧氏空间包含了欧氏几何和非欧几何两种。传统的数据类型,如1维数据(声纹、语音)、2维数据(图像)、三维数据(视频)都是欧式空间上的数据,而图数据和流形数据都是非欧式空间上的数据。
图数据是一种非常重要的数据类型,图是由节点和边组成的,图可以分为有向图和无向图。常见的图结构的数据有:社交网络、引文网络、分子结构等。通过对图数据的研究,可以应用到社交网络、引文网络中节点类型的预测、电商中的推荐系统、生物和化学中对分子结构的预测等。
2.为什么需要使用图卷积
在传统的数据中,如图像,图像是一种网格数据,有标准的形状,在进行卷积操作时,取出固定大小的patch,使用固定大小的卷积核进行卷积操作。而对于图数据来说,每个节点的邻节点数量都是不相同的,因此很难做到使用一个固定大小的卷积核进行卷积,因此传统的卷积方法在图数据上就无法应用。随着图数据的应用越来越多,因此人们开始寻求对图数据的卷积操作。
3.基于频谱域的图卷积
思想:把空间域上的图映射到谱域上进行卷积。
背景知识:傅里叶变换
首先构建一个拉普拉斯矩阵L=D-A
D:顶点度矩阵,对角矩阵
A:邻接矩阵,对称矩阵
拉普拉斯矩阵是半正定对称矩阵(半正定矩阵本身就是对称矩阵),有如下三个性质:
(1)对称矩阵一定n个线性无关的特征向量
(2)半正定矩阵的特征值一定非负
(3)对阵矩阵的特征向量相互正交,即所有特征向量构成的矩阵为正交矩阵。
拉普拉斯矩阵分解:
L = U ( λ 1 ⋱ λ n ) U − 1 L=U\left(\begin{array}{ccc}{\lambda_{1}} & {} \\ {} & {\ddots} & {} \\ {} & {} & {\lambda_{n}}\end{array}\right) U^{-1} L=U⎝⎛λ1⋱λn⎠⎞U−1
U = ( u 1 → , u 2 → , ⋯ , u n → ) U=\left(\overrightarrow{u_{1}}, \overrightarrow{u_{2}}, \cdots, \overrightarrow{u_{n}}\right) U=(u1,u2,⋯,un)是特征向量矩阵,且 U U U是一个正交矩阵, U U T = E U U^{T}=E UUT=E
Λ = ( λ 1 ⋱ λ n ) \Lambda=\left(\begin{array}{cccc}{\lambda_{1}} & {} & {} & {} \\ {} & {\ddots} & {} \\ {} & {} & {} & {\lambda_{n}}\end{array}\right) Λ=⎝⎛λ1⋱λn⎠⎞是特征值矩阵, u l → \overrightarrow{u_{l}} ul是特征值 λ l → \overrightarrow{\lambda_{l}} λl所对应的特征向量。
傅里叶变化
传统的傅里叶变化, F ( ω ) = F [ f ( t ) ] = ∫ f ( t ) e − i ω t d t F(\omega)=\mathcal{F}[f(t)]=\int f(t) e^{-i \omega t} d t F(ω)=F[f(t)]=∫f(t)e−iωtdt,
e − i ω t e^{-i \omega t} e−iωt即为基函数,其中 ω \omega ω表示基函数的不同频率。基函数与 f ( t ) f(t) f(t)积分,即可得到傅里叶变换之后的结果。
而在拉普拉斯矩阵中,我们使用特征向量 u i → \overrightarrow{u_{i}} ui表示不同的基函数,而 ω \omega ω所对应的的就是特征值 λ i → \overrightarrow{\lambda_{i}} λi
在图上进行傅里叶变化:
F ( λ l ) = f ^ ( λ l ) = ∑ i = 1 N f ( i ) u l ∗ ( i ) F\left(\lambda_{l}\right)=\hat{f}\left(\lambda_{l}\right)=\sum_{i=1}^{N} f(i) u_{l}^{*}(i) F(λl)=f^(λl)=∑i=1Nf(i)ul∗(i),其中 f ( i ) f(i) f(i)是与图的顶点一一对应的, u l ( i ) u_{l}(i) ul(i)是第 l l l个特征向量的第 i i i个分量,那么类比于传统的傅里叶变化中的积分,在图上的傅里叶变化就相当于是特征值(频率) λ l \lambda_l λl下的, f f f与 λ l \lambda_l λl 对应的特征向量 u l u_l ul 进行内积运算。 u l ∗ ( i ) u_{l}^{*}(i) ul∗(i)是特征向量 u l u_l ul 的共轭向量。
表示成矩阵的形式:
( f ^ ( λ 1 ) f ^ ( λ 2 ) ⋮ f ^ ( λ N ) ) = ( u 1 ( 1 ) u 1 ( 2 ) … u 1 ( N ) u 2 ( 1 ) u 2 ( 2 ) … u 2 ( N ) ⋮ ⋮ ⋱ ⋮ u N ( 1 ) u N ( 2 ) … u N ( N ) ) ( f ( 1 ) f ( 2 ) ⋮ f ( N ) ) \left(\begin{array}{c}{\hat{f}\left(\lambda_{1}\right)} \\ {\hat{f}\left(\lambda_{2}\right)} \\ {\vdots} \\ {\hat{f}\left(\lambda_{N}\right)}\end{array}\right)=\left(\begin{array}{cccc}{u_{1}(1)} & {u_{1}(2)} & {\dots} & {u_{1}(N)} \\ {u_{2}(1)} & {u_{2}(2)} & {\dots} & {u_{2}(N)} \\ {\vdots} & {\vdots} & {\ddots} & {\vdots} \\ {u_{N}(1)} & {u_{N}(2)} & {\dots} & {u_{N}(N)}\end{array}\right)\left(\begin{array}{c}{f(1)} \\ {f(2)} \\ {\vdots} \\ {f(N)}\end{array}\right) ⎝⎜⎜⎜⎛f^(λ1)f^(λ2)⋮f^(λN)⎠⎟⎟⎟⎞=⎝⎜⎜⎜⎛u1(1)u2(1)⋮uN(1)u1(2)u2(2)⋮uN(2)……⋱…u1(N)u2(N)⋮uN(N)⎠⎟⎟⎟⎞⎝⎜⎜⎜⎛f(1)f(2)⋮f(N)⎠⎟⎟⎟⎞
即: f ^ = U T f \hat{f}=U^{T} f f^=UTf
逆傅里叶变换
传统的傅里叶变换是对频率 ω \omega ω 求积分:
F − 1 [ F ( ω ) ] = 1 2 Π ∫ F ( ω ) e i ω t d ω \mathcal{F}^{-1}[F(\omega)]=\frac{1}{2 \Pi} \int F(\omega) e^{i \omega t} d \omega F−1[F(ω)]=2Π1∫F(ω)eiωtdω
在图上进行逆傅里叶变化,则是对 λ l \lambda_l λl积分:
f ( i ) = ∑ l = 1 N f ^ ( λ l ) u l ( i ) f(i)=\sum_{l=1}^{N} \hat{f}\left(\lambda_{l}\right) u_{l}(i) f(i)=∑l=1Nf^(λl)ul(i)
用矩阵的形式进行表示:
( f ( 1 ) f ( 2 ) ⋮ f ( N ) ) = ( u 1 ( 1 ) u 2 ( 1 ) … u N ( 1 ) u 1 ( 2 ) u 1 ( 2 ) … u N ( 2 ) ⋮ ⋮ ⋱ ⋮ u 1 ( N ) u 2 ( N ) … u N ( N ) ) ( f ^ ( λ 1 ) f ^ ( λ 2 ) ⋮ f ^ ( λ N ) ) \left(\begin{array}{c}{f(1)} \\ {f(2)} \\ {\vdots} \\ {f(N)}\end{array}\right)=\left(\begin{array}{cccc}{u_{1}(1)} & {u_{2}(1)} & {\dots} & {u_{N}(1)} \\ {u_{1}(2)} & {u_{1}(2)} & {\dots} & {u_{N}(2)} \\ {\vdots} & {\vdots} & {\ddots} & {\vdots} \\ {u_{1}(N)} & {u_{2}(N)} & {\dots} & {u_{N}(N)}\end{array}\right)\left(\begin{array}{c}{\hat{f}\left(\lambda_{1}\right)} \\ {\hat{f}\left(\lambda_{2}\right)} \\ {\vdots} \\ {\hat{f}\left(\lambda_{N}\right)}\end{array}\right) ⎝⎜⎜⎜⎛f(1)f(2)⋮f(N)⎠⎟⎟⎟⎞=⎝⎜⎜⎜⎛u1(1)u1(2)⋮u1(N)u2(1)u1(2)⋮u2(N)……⋱…uN(1)uN(2)⋮uN(N)⎠⎟⎟⎟⎞⎝⎜⎜⎜⎛f^(λ1)f^(λ2)⋮f^(λN)⎠⎟⎟⎟⎞
即: f = U f ^ f=U \hat{f} f=Uf^
(1)spectral CNN方法
思想:把待卷积函数和卷积核通过傅里叶变换同时映射到谱域,在谱域上进行卷积操作,再把卷积的结果逆傅里叶变换,得到在空间域上的结果。
具体步骤如下:
给定待卷积函数 f f f,卷积核 h h h(随机初始化的参数矩阵,需要进行训练)
对待卷积函数进行傅里叶变化,得到 f ^ = U T f \hat{f}=U^{T} f f^=UTf
对卷积核进行傅里叶变化,得到 h ^ ( λ l ) = ∑ i = 1 N h ( i ) u l ∗ ( i ) \hat{h}\left(\lambda_{l}\right)=\sum_{i=1}^{N} h(i) u_{l}^{*}(i) h^(λl)=∑i=1Nh(i)ul∗(i)= ( h ^ ( λ 1 ) ⋱ h ^ ( λ n ) ) \left(\begin{array}{cccc}{\hat{h}\left(\lambda_{1}\right)} & {} & {} & {} \\ {} & {\ddots} & {} \\ {} & {} & {\hat{h}\left(\lambda_{n}\right)}\end{array}\right) ⎝⎛h^(λ1)⋱h^(λn)⎠⎞
两者的卷积操作为:
( h ^ ( λ 1 ) ⋱ h ^ ( λ n ) ) U T f \left(\begin{array}{ccc}{\hat{h}\left(\lambda_{1}\right)} & {} & {} \\ {} & {\ddots} & {} \\ {} & {} & {\hat{h}\left(\lambda_{n}\right)}\end{array}\right) U^{T} f ⎝⎛h^(λ1)⋱h^(λn)⎠⎞UTf
再对上面的结果进行逆傅里叶变化,得到:
( f ∗ h ) G = U ( h ^ ( λ 1 ) ⋱ h ^ ( λ n ) ) U T f (f * h)_{G}=U\left(\begin{array}{ccc}{\hat{h}\left(\lambda_{1}\right)} & {} & {} \\ {} & {\ddots} & {} \\ {} & {} & {\hat{h}\left(\lambda_{n}\right)}\end{array}\right) U^{T} f (f∗h)G=U⎝⎛h^(λ1)⋱h^(λn)⎠⎞UTf
可以简写成: ( f ∗ h ) G = U ( ( U T h ) ⊙ ( U T f ) ) (f * h)_{G}=U\left(\left(U^{T} h\right) \odot\left(U^{T} f\right)\right) (f∗h)G=U((UTh)⊙(UTf)), ⊙ \odot ⊙表示内积运算
(2)ChebNet 切比雪夫图卷积网络
思想:在spectral CNN方法中,参数是全局的,需要n个参数,同时拉普拉斯矩阵分解计算量大。
在本方法中,对spectral CNN进行了改进,使用的是局部k个参数。
具体步骤:
在Chebyshev-CNN中,使用下面的方式定义了一个卷积核:
对于卷积核 ( h ^ ( λ 1 ) ⋱ h ^ ( λ n ) ) \left(\begin{array}{cccc}{\hat{h}\left(\lambda_{1}\right)} & {} & {} & {} \\ {} & {\ddots} & {} \\ {} & {} & {\hat{h}\left(\lambda_{n}\right)}\end{array}\right) ⎝⎛h^(λ1)⋱h^(λn)⎠⎞中的每一个元素:
由原来的 h ^ ( λ l ) = ∑ i = 1 N h ( i ) u l ∗ ( i ) \hat{h}\left(\lambda_{l}\right)=\sum_{i=1}^{N} h(i) u_{l}^{*}(i) h^(λl)=∑i=1Nh(i)ul∗(i)变成了 h ^ ( λ l ) = ∑ k = 0 K − 1 θ k λ l k \hat{h}\left(\lambda_{l}\right)=\sum_{k=0}^{K-1} \theta_{k} \lambda_{l}^{k} h^(λl)=∑k=0K−1θkλlk,参数个数由n
个变成了k个。
卷积核的矩阵形式表示为 g θ ( Λ ) = ∑ k = 0 K − 1 θ k Λ k g_{\theta}(\Lambda)=\sum_{k=0}^{K-1} \theta_{k} \Lambda^{k} gθ(Λ)=∑k=0K−1θkΛk, θ k \theta_{k} θk是参数
更进一步的,利用切比雪夫多项式进行近似计算:
g θ ( Λ ) = ∑ k = 0 K − 1 θ k T k ( Λ ~ ) g_{\theta}(\Lambda)=\sum_{k=0}^{K-1} \theta_{k} T_{k}(\tilde{\Lambda}) gθ(Λ)=∑k=0K−1θkTk(Λ~),其中
切比雪夫多项式 T k ( Λ ~ ) T_{k}(\tilde{\Lambda}) Tk(Λ~)定义为: T 0 = 1 T_{0}=1 T0=1, T 1 = x T_{1}=x T1=x, T k ( x ) = 2 x T k − 1 ( x ) − T k − 2 ( x ) T_{k}(x)=2 x T_{k-1}(x)-T_{k-2}(x) Tk(x)=2xTk−1(x)−Tk−2(x),
Λ ~ = 2 Λ / λ max − I n \tilde{\Lambda}=2 \Lambda / \lambda_{\max }-I_{n} Λ~=2Λ/λmax−In,这一步的目的是把特征值都归一化到 ( − 1 , 1 ) (-1,1) (−1,1)之间。
卷积操作:
( x ∗ g θ ) = ( ∑ k = 0 K − 1 θ k λ l k ⋱ ∑ k = 0 K − 1 θ k λ l k ) x (x * g_{\theta})=\left(\begin{array}{ccc}{\sum_{k=0}^{K-1} \theta_{k} \lambda_{l}^{k}} & {} & {} \\ {} & {\ddots} & {} \\ {} & {} & {\sum_{k=0}^{K-1} \theta_{k} \lambda_{l}^{k}}\end{array}\right) x (x∗gθ)=⎝⎛∑k=0K−1θkλlk⋱∑k=0K−1θkλlk⎠⎞x
在该方法中,通过切比雪夫多项式近似计算,而避免了对拉普拉斯矩阵的分解,减少了计算量,同时参数个数也减少到了k个。
注:一般K取值为1或2,分别表示一阶邻域和二阶邻域。
(3)GCN(Graph Convolutional Network)
思想:该方法是对ChebNet方法的进一步近似,令 k = 1 k=1 k=1, λ m a x = 2 \lambda_{max}=2 λmax=2
具体步骤:
在上面的方法中,我们已知卷积操作 g θ ⋆ x ≈ ∑ k = 0 K θ k T k ( Λ ~ ) x g_{\theta} \star x \approx \sum_{k=0}^{K} \theta_{k} T_{k}(\tilde{\Lambda}) x gθ⋆x≈∑k=0KθkTk(Λ~)x
Λ ~ = 2 Λ / λ max − I n \tilde{\Lambda}=2 \Lambda / \lambda_{\max }-I_{n} Λ~=2Λ/λmax−In
更进一步地,我们令 k = 1 k=1 k=1,得到
g θ ⋆ x ≈ ∑ k = 0 K = 1 θ k T k ( Λ ~ ) x = θ 0 T 0 ( Λ ~ ) x + θ 1 T 1 ( Λ ~ ) x g_{\theta} \star x \approx \sum_{k=0}^{K=1} \theta_{k} T_{k}(\tilde{\Lambda}) x=\theta_{0} T_{0}(\tilde{\Lambda}) x + \theta_{1} T_{1}(\tilde{\Lambda}) x gθ⋆x≈∑k=0K=1θkTk(Λ~)x=θ0T0(Λ~)x+θ1T1(Λ~)x
又因为 T 0 = 1 T_{0}=1 T0=1, T 1 = x T_{1}=x T1=x,因此上式 = θ 0 x + θ 1 Λ ~ x =\theta_{0} x + \theta_{1} \tilde{\Lambda} x =θ0x+θ1Λ~x
令 λ m a x = 2 \lambda_{max}=2 λmax=2,则 Λ ~ = 2 Λ / λ max − I n = Λ − I n \tilde{\Lambda}=2 \Lambda / \lambda_{\max }-I_{n}=\Lambda -I_{n} Λ~=2Λ/λmax−In=Λ−In
因此上式 = θ 0 x + θ 1 ( Λ − I n ) x = θ 0 x − θ 1 D − 1 2 A D − 1 2 x =\theta_{0} x + \theta_{1}(\Lambda -I_{n})x=\theta_{0} x-\theta_{1}D^{-\frac{1}{2}} A D^{-\frac{1}{2}} x =θ0x+θ1(Λ−In)x=θ0x−θ1D−21AD−21x
为了避免过拟合,我们减少参数的数量,令 θ = θ 0 = − θ 1 \theta=\theta_{0}=-\theta_{1} θ=θ0=−θ1
则可以得到 g θ ⋆ x ≈ θ ( I N + D − 1 2 A D − 1 2 ) x g_{\theta} \star x \approx \theta\left(I_{N}+D^{-\frac{1}{2}} A D^{-\frac{1}{2}}\right) x gθ⋆x≈θ(IN+D−21AD−21)x
因为 I N + D − 1 2 A D − 1 2 I_{N}+D^{-\frac{1}{2}} A D^{-\frac{1}{2}} IN+D−21AD−21是 ( 0 , 2 ) (0,2) (0,2)之间的,为了防止梯度消失和梯度爆炸,我们进行重归一化:
I N + D − 1 2 A D − 1 2 → D ~ − 1 2 A ~ D ~ − 1 2 I_{N}+D^{-\frac{1}{2}} A D^{-\frac{1}{2}} \rightarrow \tilde{D}^{-\frac{1}{2}} \tilde{A} \tilde{D}^{-\frac{1}{2}} IN+D−21AD−21→D~−21A~D~−21,其中 A ~ = A + I N \tilde{A}=A+I_{N} A~=A+IN, D ~ i i = ∑ j A ~ i j \tilde{D}_{i i}=\sum_{j} \tilde{A}_{i j} D~ii=∑jA~ij
(4)总结
基于频谱域的图卷积方法,都需要对整张图进行计算,受内存等条件的限制,难以在大规模的图上进行运算。
4.基于空间域的图卷积
在空间域上进行图卷积的思想:聚合中心节点和邻居节点的特征,然后为中心节点得到一个新的特征表达。
(1) PATCHY-SAN方法
思想:在图上进行卷积操作时,最大的限制就是每个节点的邻节点个数不同,无法使用一个固定大小的卷积核进行卷积,PATCHY-SAN方法是参考CNN对输入的图像进行局部关联的区域进行操作,因此也抽取图中的局部关联区域进行相应的操作,集体来说就是把一整张图切分成多个子图,每个子图的邻节点数量相同,然后使用一个固定大小的卷积核进行卷积操作。
具体步骤:
(1) 从图中选择一个固定长度的节点序列
先通过一个算法(如中心性测量方式),确定节点的排序,从该序列中根据一定的间隔S,选出w个节点构成最终的节点序列
(2) 邻居节点收集
对于上一步获得的节点序列中的每一个节点,利用广度优先搜索扩展邻居节点,和源节点一起构成一个至少k大小的邻域集合。
(3) 图规范化
对邻域集合中的各个节点标号排序,得到k维的接受域(即邻域,给每个中心节点选择k个邻节点),如果第一步中不足w个节点,则直接在这一步中,把接受域都置为全0,相当于padding的作用。
(4) 卷积结构
对于节点属性,k个节点的属性值构成了一个输入通道,对于边的属性,k*k个属性值构成了另一个输入通道。
总结:该方法的关键步骤有两个,一个是如何对节点进行排序,二是如何给选定的w个节点构建接受域。该方法的缺点:把每个节点的邻节点强行约束为k个,会导致后续的预测效果降低。
(2) GraphSage 归纳学习图卷积
源论文:Inductive Representation Learning on Large Graphs
归纳学习和直推式学习:
数据集:标签数据+为标签数据+测试数据
直推式学习:在学习过程中,对所有的数据进行学习,然后对没标记数据进行预测,预测的节点是网络已见节点。直推式学习只能学习一张图上的数据,不能泛化到其他图中。
归纳学习:在学习过程中,测试数据不参与学习,然后对测试数据进行预测,即预测的节点是网络未见节点。归纳学习,可以将学习到的模型泛化到其他图上。
算法思想:每个节点都聚合它的k阶邻域的邻居节点的表示,映射到一个新的空间上,从而得到一个新的表示方法,这个表示方法在它的映射空间中有这样的一些性质:原来关系紧密的节点,在映射空间中,它们的距离更近,原来关系不紧密的节点,在映射空间中,它们的距离更远。
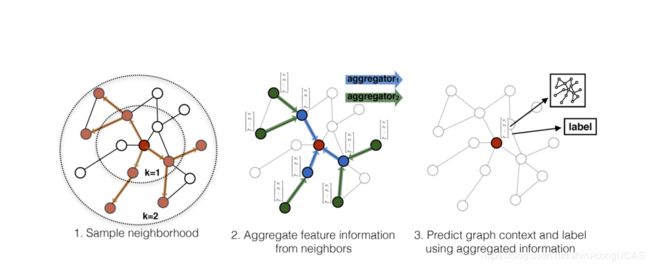
算法描述:
输入:图 G ( V , E ) \mathcal{G}(\mathcal{V}, \mathcal{E}) G(V,E),每个节点的特征向量 { x v , ∀ v ∈ V } \left\{\mathbf{x}_{v}, \forall v \in \mathcal{V}\right\} {xv,∀v∈V},给定 K K K的值,当 K = 1 K=1 K=1时表示一阶邻域,当 K = 2 K=2 K=2时表示二阶邻域。
(1)首先聚合其k=1阶邻域内所有节点的特征向量,给节点 v v v初始化一个表示向量: h v 0 ← x v , ∀ v ∈ V \mathbf{h}_{v}^{0} \leftarrow \mathbf{x}_{v}, \forall v \in \mathcal{V} hv0←xv,∀v∈V
(2)聚合节点 v v v一阶邻域内所有的邻居节点的表示:
h N ( v ) k ← \mathbf{h}_{\mathcal{N}(v)}^{k} \leftarrow hN(v)k← AGGREGATE k ( { h u k − 1 , ∀ u ∈ N ( v ) } ) _{k}\left(\left\{\mathbf{h}_{u}^{k-1}, \forall u \in \mathcal{N}(v)\right\}\right) k({huk−1,∀u∈N(v)})
这里聚合的邻居节点,并不是其原始的特征表示形式 x u {\mathbf{x}_{u}} xu,而是其 k − 1 k-1 k−1阶聚合之后的表达形式 h u k − 1 \mathbf{h}_{u}^{k-1} huk−1,同时这里的AGGREGATE表示的是聚合函数,之后详细介绍。
(3)把聚合的邻居节点 ( k − 1 ) (k-1) (k−1)的特征表达和节点本身 ( k − 1 ) (k-1) (k−1)阶的特征表达进行拼接,得到节点 v v v的 k k k阶表示:
h v k ← σ ( W k ⋅ CONCAT ( h v k − 1 , h N ( v ) k ) ) \mathbf{h}_{v}^{k} \leftarrow \sigma\left(\mathbf{W}^{k} \cdot \operatorname{CONCAT}\left(\mathbf{h}_{v}^{k-1}, \mathbf{h}_{\mathcal{N}(v)}^{k}\right)\right) hvk←σ(Wk⋅CONCAT(hvk−1,hN(v)k))
进行归一化操作,得到:
h v k ← h v k / ∥ h v k ∥ 2 , ∀ v ∈ V \mathbf{h}_{v}^{k} \leftarrow \mathbf{h}_{v}^{k} /\left\|\mathbf{h}_{v}^{k}\right\|_{2}, \forall v \in \mathcal{V} hvk←hvk/∥∥hvk∥∥2,∀v∈V
(4)聚合完k=1时的所有节点之后,逐个聚合 k = 2 , 3... K k=2,3...K k=2,3...K,把最终 k = K k=K k=K的聚合结果赋值给
z v ← h v K , ∀ v ∈ V \mathbf{z}_{v} \leftarrow \mathbf{h}_{v}^{K}, \forall v \in \mathcal{V} zv←hvK,∀v∈V
聚合函数:
(1)Mean aggregator: h v k ← σ ( W ⋅ MEAN ( { h v k − 1 } ∪ { h u k − 1 , ∀ u ∈ N ( v ) } ) \mathbf{h}_{v}^{k} \leftarrow \sigma\left(\mathbf{W} \cdot \operatorname{MEAN}\left(\left\{\mathbf{h}_{v}^{k-1}\right\} \cup\left\{\mathbf{h}_{u}^{k-1}, \forall u \in \mathcal{N}(v)\right\}\right)\right. hvk←σ(W⋅MEAN({hvk−1}∪{huk−1,∀u∈N(v)})
(2)LSTM aggregator:把所有的邻域表达向量通过一个LSTM网络,得到一个聚合的输出结果,因为聚合函数不受输入顺序的影响,因此在输入网络中,可以任意顺序输入。
(3)Pooling aggregator :AGGREGATE k pool = max ( { σ ( W pool h u i k + b ) , ∀ u i ∈ N ( v ) } ) _{k}^{\text { pool }}=\max \left(\left\{\sigma\left(\mathbf{W}_{\text { pool }} \mathbf{h}_{u_{i}}^{k}+\mathbf{b}\right), \forall u_{i} \in \mathcal{N}(v)\right\}\right) k pool =max({σ(W pool huik+b),∀ui∈N(v)})
虽然文中提出了3中聚合方式,但通过实验证明,Max Pooling aggregator 的效果更好。
损失函数
对于聚合之后的结果,我们要进行参数训练,使用的损失函数为:
J G ( z u ) = − log ( σ ( z u ⊤ z v ) ) − Q ⋅ E v n ∼ P n ( v ) log ( σ ( − z u ⊤ z v n ) ) J_{\mathcal{G}}\left(\mathbf{z}_{u}\right)=-\log \left(\sigma\left(\mathbf{z}_{u}^{\top} \mathbf{z}_{v}\right)\right)-Q \cdot \mathbb{E}_{v_{n} \sim P_{n}(v)} \log \left(\sigma\left(-\mathbf{z}_{u}^{\top} \mathbf{z}_{v_{n}}\right)\right) JG(zu)=−log(σ(zu⊤zv))−Q⋅Evn∼Pn(v)log(σ(−zu⊤zvn))
u u u和 v v v是在一个固定长度的随机游走中,一同出现的节点,而 P n ( v ) P_{n(v)} Pn(v)表示不和 u u u一同出现的节点。该损失函数如果越小,那么 log ( σ ( z u ⊤ z v ) ) \log \left(\sigma\left(\mathbf{z}_{u}^{\top} \mathbf{z}_{v}\right)\right) log(σ(zu⊤zv))就要越大, z u ⊤ z v \mathbf{z}_{u}^{\top} \mathbf{z}_{v} zu⊤zv就要越大,而 z u ⊤ z v \mathbf{z}_{u}^{\top} \mathbf{z}_{v} zu⊤zv表示的是余弦相似性,余弦相似性越大,那么两个向量在映射空间的距离越近。因为在随机游走的路线中一同出现,因此节点 u u u和 v v v比较相近,因此两者在映射空间的余弦相似性越大。反之,对于不在随机游走的路线中一同出现的节点 P n ( v ) P_{n(v)} Pn(v),则希望他们的余弦相似性越小,最终当损失函数趋近于平衡时,那么图中相近的点会在空间中聚集,图中远的点,也会在映射空间中分离。
总结:该方法只是学习了节点的一种特征表达,需要在通过一些其他算法,对节点进行分类。同时这种归纳式的学习,可以泛化到其他的图中。
(2) 混合卷积模型MoNet
算法思想:构建了一个混合模型,可以同时应用于图像、图和流形中。
在图像上的卷积,即传统的CNN模型;在图上的卷积,GCN模型;在流形上的CNN,主要有两种模型,一个是Geodesic GCN,另一个是Anisotropic GCN。
具体算法:
卷积操作:
构建一个patch
D j ( x ) f = ∑ y ∈ N ( x ) w j ( u ( x , y ) ) f ( y ) , j = 1 , … , J D_{j}(x) f=\sum_{y \in \mathcal{N}(x)} w_{j}(\mathbf{u}(x, y)) f(y), \quad j=1, \ldots, J Dj(x)f=∑y∈N(x)wj(u(x,y))f(y),j=1,…,J
J J J表示抽取的patch的大小,
在Geodesic GCN和Anisotropic GCN中,都手工构建了一个固定大小的权重,在本方法中,使用了一个可以训练的参数 Σ j ∈ R d × d \boldsymbol{\Sigma}_{j} \in R^{ d × d} Σj∈Rd×d 和 μ j ∈ R d × 1 \boldsymbol{\mu}_{j} \in R^{ d × 1} μj∈Rd×1,构建了一个可以被学习的权重 w j ( u ) w_{j}(\mathbf{u}) wj(u),构建方法如下:
w j ( u ) = exp ( − 1 2 ( u − μ j ) ⊤ Σ j − 1 ( u − μ j ) ) w_{j}(\mathbf{u})=\exp \left(-\frac{1}{2}\left(\mathbf{u}-\boldsymbol{\mu}_{j}\right)^{\top} \boldsymbol{\Sigma}_{j}^{-1}\left(\mathbf{u}-\boldsymbol{\mu}_{j}\right)\right) wj(u)=exp(−21(u−μj)⊤Σj−1(u−μj))
最终卷积操作表示为:
( f ⋆ g ) ( x ) = ∑ j = 1 J g j D j ( x ) f (f \star g)(x)=\sum_{j=1}^{J} g_{j} D_{j}(x) f (f⋆g)(x)=∑j=1JgjDj(x)f
为了计算 w j ( u ) w_{j}(\mathbf{u}) wj(u),需要先构建伪坐标 u ( x , y ) \mathbf{u}(x, y) u(x,y):
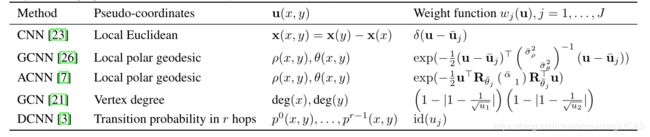
原始的CNN、GCNN、ACNN、GCN、DCN模型都相当于混合模型的一种特例,针对不同的模型,构建伪坐标的方式不同:
(1)针对CNN,混合模型把取出的一个patch,给每个像素点赋值一个坐标值,如下图所示,而伪坐标 u ( x , y ) \mathbf{u}(x, y) u(x,y)
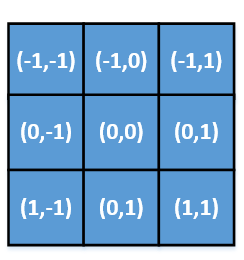
(2)针对GCNN和DCNN就是对测地极坐标,构建伪坐标
(3)针对GCN,就是针对节点的度,进行构建伪坐标, u ( x , y ) = ( 1 deg ( x ) , 1 deg ( y ) ) ⊤ \mathbf{u}(x, y)=\left(\frac{1}{\sqrt{\operatorname{deg}(\mathrm{x})}}, \frac{1}{\sqrt{\operatorname{deg}(\mathrm{y})}}\right)^{\top} u(x,y)=(deg(x)1,deg(y)1)⊤。
(3) GAT-Graph Attention Networks
思想:图attention是self-attention机制在图数据上的应用,通过自注意力机制学习节点 i i i和邻节点 j j j之间的一个权重系数 α i j \alpha_{i j} αij,该系数表示的是节点 i i i与节点 j j j之间的重要性程度,最终节点 i i i的特征表示就是邻节点的加权和。
具体步骤:
(1)学习权重 α i j \alpha_{i j} αij
e i j = a ( W h ⃗ i , W h ⃗ j ) e_{i j}=a\left(\mathbf{W} \vec{h}_{i}, \mathbf{W} \vec{h}_{j}\right) eij=a(Whi,Whj),其中 h ⃗ i , h ⃗ j \vec{h}_{i}, \vec{h}_{j} hi,hj表示的是节点 i i i和节点 j j j的特征向量( h ⃗ i , h ⃗ j \vec{h}_{i}, \vec{h}_{j} hi,hj ∈ R F \in R^F ∈RF), W h ⃗ i , W h ⃗ j \mathbf{W} \vec{h}_{i}, \mathbf{W} \vec{h}_{j} Whi,Whj表示把原始的特征向量映射到另一个空间( W h ⃗ i , W h ⃗ j ∈ R F ′ \mathbf{W} \vec{h}_{i}, \mathbf{W} \vec{h}_{j} \in \mathbb{R}^{F^{\prime}} Whi,Whj∈RF′)。 a a a表示的是自注意力函数,在本论文中采用的是
e i j e_{i j} eij=LeakyReLU ( a → T [ W h ⃗ i ∥ W h ⃗ j ] ) \left(\overrightarrow{\mathbf{a}}^{T}\left[\mathbf{W} \vec{h}_{i} \| \mathbf{W} \vec{h}_{j}\right]\right) (aT[Whi∥Whj]),即先把 ( W h ⃗ i , W h ⃗ j ) \left(\mathbf{W} \vec{h}_{i}, \mathbf{W} \vec{h}_{j}\right) (Whi,Whj)进行拼接操作,乘以一个权重矩阵 a → T \overrightarrow{\mathbf{a}}^{T} aT,再通过LeakyReLU激活函数得到 e i j e_{i j} eij
最后把 e i j e_{i j} eij归一化得到 α i j \alpha_{i j} αij:
α i j = softmax j ( e i j ) = exp ( e i j ) ∑ k ∈ N i exp ( e i k ) \alpha_{i j}=\operatorname{softmax}_{j}\left(e_{i j}\right)=\frac{\exp \left(e_{i j}\right)}{\sum_{k \in \mathcal{N}_{i}} \exp \left(e_{i k}\right)} αij=softmaxj(eij)=∑k∈Niexp(eik)exp(eij)( N i \mathcal{N}_{i} Ni表示节点i的邻节点)
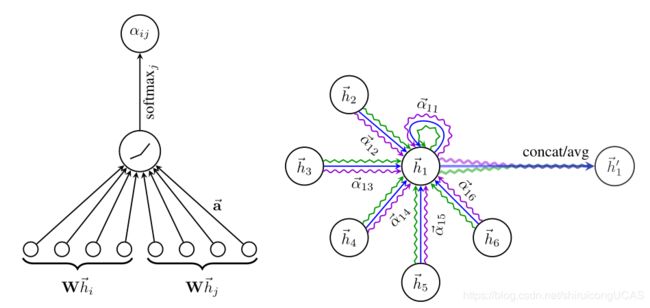
(2)构建节点i的特征表示 h ⃗ i ′ \vec{h}_{i}^{\prime} hi′
h ⃗ i ′ = σ ( ∑ j ∈ N i α i j W h ⃗ j ) \vec{h}_{i}^{\prime}=\sigma\left(\sum_{j \in \mathcal{N}_{i}} \alpha_{i j} \mathbf{W} \vec{h}_{j}\right) hi′=σ(∑j∈NiαijWhj)
特别的,为了提高模型的稳定性,让模型有更好的表现,可以采取多头自注意力机制,设定K个自注意力机制,每个自注意力机制单独进行学习,最后把学习到的结果进行一个融合,融合的方式有以下两种:
h ⃗ i ′ = ∥ k = 1 K σ ( ∑ j ∈ N i α i j k W k h ⃗ j ) \vec{h}_{i}^{\prime}=\|_{k=1}^{K} \sigma\left(\sum_{j \in \mathcal{N}_{i}} \alpha_{i j}^{k} \mathbf{W}^{k} \vec{h}_{j}\right) hi′=∥k=1Kσ(∑j∈NiαijkWkhj)
h ⃗ i ′ = σ ( 1 K ∑ k = 1 K ∑ j ∈ N i α i j k W k h ⃗ j ) \vec{h}_{i}^{\prime}=\sigma\left(\frac{1}{K} \sum_{k=1}^{K} \sum_{j \in \mathcal{N}_{i}} \alpha_{i j}^{k} \mathbf{W}^{k} \vec{h}_{j}\right) hi′=σ(K1∑k=1K∑j∈NiαijkWkhj)
总结:使用GAT模型时,可以在所有的边上和所有的节点上进行并行学习,所有的节点和所有的边都共享同一个自注意力机制。相比于之前的模型,GAT模型的容量更大,有更好的表现性能,最重要的是,GAT不用固定输入的大小,还可以连接所有的邻居节点。
(4) 总结
基于空间的图卷积,可以对图中的节点进行操作,而不用计算一整张图,因此随着节点数量的增加,基于谱域的卷积计算量就会快速增加,而基于空间域的方法,是对图中部分节点进行聚合计算的,因此计算量不会显著增加,因此基于空间域的卷积更适合在大规模的图上做计算,同时还可以使用mini-batch的方法进行训练。
基于谱域的图卷积,被限制只能对无向图进行卷积,而基于空间域的方法,能更灵活的处理有向图的问题。
基于谱域的图卷积,要求图有固定的大小,因此很难泛化到其他图中,而基于空间域的图卷积,可以很好的泛化到其他图上。