激光雷达点云预处理:传感器时间同步、点云去畸变
一、传感器时间同步
多传感器融合过程中由于传感器之间的采集频率不同,导致无法保证传感器数据同步。这里以激光雷达为核心传感器,每次收到一次雷达数据,便以当前雷达数据采集时刻作为要插入的时间点,该时刻另一传感器IMU的数据通过插值获得。这里同样可以参考VINS里相机和IMU时间同步的函数代码getMeasurements()。
主程序在front_end_flow.cpp文件中的ReadData()函数添加。
ReadData()
- 从ros缓冲区中传感器数据取出来,并放进XXX_data_buff_容器中
- 传感器同步,另外三种传感器做插值
- 如果任意传感器没有插值,剔除该雷达点云帧,找下一个点云帧做融合
1、读取传感器数据放进XXX_data_buff_容器中
雷达点云作为主传感器,其他传感器做插值。包含IMU信息(unsynced_imu_)、速度信息(unsynced_velocity_)、GNSS信息(unsynced_gnss_)
// 雷达点云不需要插值,直接放进cloud_data_buff_容器中
cloud_sub_ptr_->ParseData(cloud_data_buff_);
// 其他传感器原始数据放进未做同步的临时容器中unsynced_XXX_
static std::deque<IMUData> unsynced_imu_;
static std::deque<VelocityData> unsynced_velocity_;
static std::deque<GNSSData> unsynced_gnss_;
// 放进XXX_data_buff_容器中
imu_sub_ptr_->ParseData(unsynced_imu_);
velocity_sub_ptr_->ParseData(unsynced_velocity_);
gnss_sub_ptr_->ParseData(unsynced_gnss_);
// 点云容器不能为空
if (cloud_data_buff_.size() == 0)
return false;
以imu的ParseData()函数为例:
ParseData()
读取数据,将新的传感器数据new_imu_data_填充进imu容器imu_data_buff中。
void IMUSubscriber::ParseData(std::deque<IMUData>& imu_data_buff) {
if (new_imu_data_.size() > 0) {
imu_data_buff.insert(imu_data_buff.end(), new_imu_data_.begin(), new_imu_data_.end());
new_imu_data_.clear();
}
}
2、传感器同步,另外三种传感器做插值
cloud_time为主传感器激光雷达的参考时间,然后后面通过SyncData()函数对三个传感器进行插值实现同步操作。具体就是索引和插值。
double cloud_time = cloud_data_buff_.front().time;
bool valid_imu = IMUData::SyncData(unsynced_imu_, imu_data_buff_, cloud_time);
bool valid_velocity = VelocityData::SyncData(unsynced_velocity_, velocity_data_buff_, cloud_time);
bool valid_gnss = GNSSData::SyncData(unsynced_gnss_, gnss_data_buff_, cloud_time);
3、如果任意传感器没有插值,剔除该雷达点云帧,找下一个点云帧做融合
static bool sensor_inited = false;
if (!sensor_inited) {
if (!valid_imu || !valid_velocity || !valid_gnss) {
cloud_data_buff_.pop_front();
return false;
}
sensor_inited = true;
}
插值SyncData()
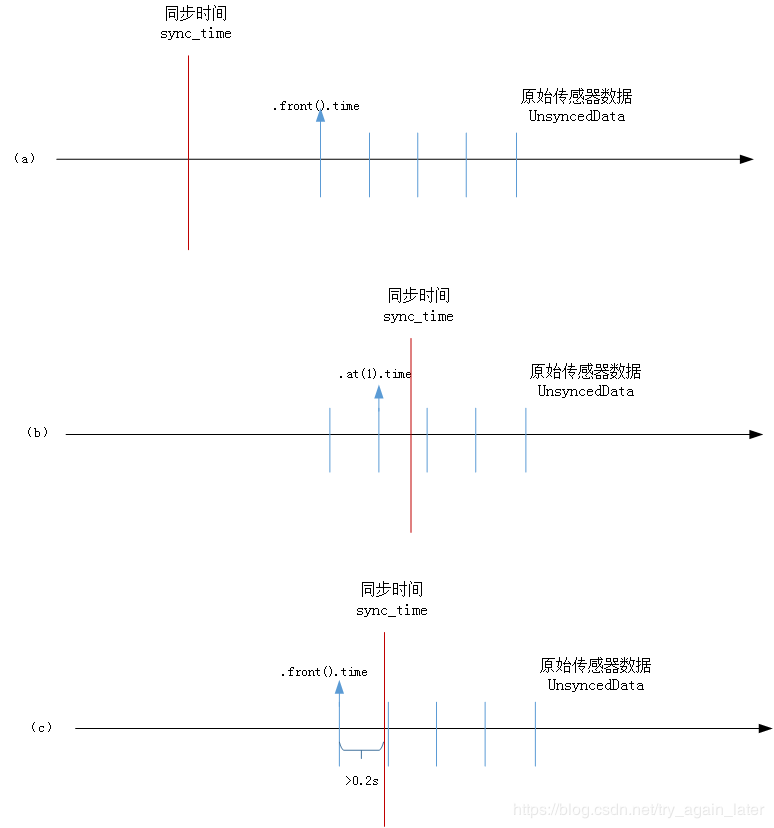
插值的流程是先获得主传感器时间,然后根据索引结果获得这一同步时间前后的两帧数据,根据前后两帧数据的采集时刻,以及要插入的时刻,根据比例获得权重得到另一传感器在同步时间的结果。这里以IMU数据为例,三种传感器流程类似。
- 找到与同步时间相邻的左右两个数据,在UnsyncedData.at(0)和.at(1)之间
- 根据时间差计算权重线性插值
输入原始数据,输出线性插值后的数据。
bool IMUData::SyncData(std::deque<IMUData>& UnsyncedData, std::deque<IMUData>& SyncedData, double sync_time) {
// 1.保证数据大于2个,同步时间在两个传感器数据UnsyncedData.at(0)和.at(1)中间
while (UnsyncedData.size() >= 2) {
// a. 同步时间sync小于传感器第一个数据,失败
if (UnsyncedData.front().time > sync_time)
return false;
// b. 同步时间sync大于第二个数据,将第二个设置为.at(0)
if (UnsyncedData.at(1).time < sync_time) {
UnsyncedData.pop_front();
continue;
}
// c. 距离前一个时间差值较大,说明数据有丢失,前一个不能用
if (sync_time - UnsyncedData.front().time > 0.2) {
UnsyncedData.pop_front();
break;
}
// d. 距离后一个时间差值较大,说明数据有丢失,后一个不能用
if (UnsyncedData.at(1).time - sync_time > 0.2) {
UnsyncedData.pop_front();
break;
}
break;
}
if (UnsyncedData.size() < 2)
return false;
// 同步数据synced,前后两帧数据front、back
IMUData front_data = UnsyncedData.at(0);
IMUData back_data = UnsyncedData.at(1);
IMUData synced_data;
// 2、根据时间差计算权重线性插值
double front_scale = (back_data.time - sync_time) / (back_data.time - front_data.time);
double back_scale = (sync_time - front_data.time) / (back_data.time - front_data.time);
synced_data.time = sync_time;// 同步时间
// 线速度
synced_data.linear_acceleration.x = front_data.linear_acceleration.x * front_scale + back_data.linear_acceleration.x * back_scale;
synced_data.linear_acceleration.y = front_data.linear_acceleration.y * front_scale + back_data.linear_acceleration.y * back_scale;
synced_data.linear_acceleration.z = front_data.linear_acceleration.z * front_scale + back_data.linear_acceleration.z * back_scale;
// 角速度
synced_data.angular_velocity.x = front_data.angular_velocity.x * front_scale + back_data.angular_velocity.x * back_scale;
synced_data.angular_velocity.y = front_data.angular_velocity.y * front_scale + back_data.angular_velocity.y * back_scale;
synced_data.angular_velocity.z = front_data.angular_velocity.z * front_scale + back_data.angular_velocity.z * back_scale;
// 四元数插值有线性插值和球面插值,球面插值更准确,但是两个四元数差别不大是,二者精度相当
// 由于是对相邻两时刻姿态插值,姿态差比较小,所以可以用线性插值
synced_data.orientation.x = front_data.orientation.x * front_scale + back_data.orientation.x * back_scale;
synced_data.orientation.y = front_data.orientation.y * front_scale + back_data.orientation.y * back_scale;
synced_data.orientation.z = front_data.orientation.z * front_scale + back_data.orientation.z * back_scale;
synced_data.orientation.w = front_data.orientation.w * front_scale + back_data.orientation.w * back_scale;
synced_data.orientation.Normlize();// 线性插值之后要归一化
// 最后插入即可
SyncedData.push_back(synced_data);
return true;
}
}
四种同步时间关系如下图所示。
二、点云畸变补偿
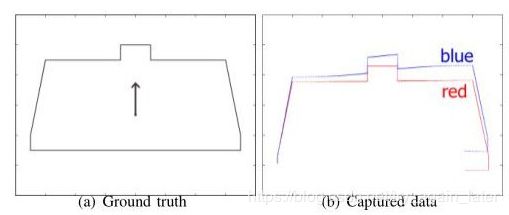
激光点数据不是瞬时获得的,激光测量时伴随着机器人的运动,一个数据采集周期内当激光雷达运动到不同位置时,机器人以为自己是在同一个位置测量出来的,所以会出现畸变。
激光雷达扫描过程中采集三维点云数据的过程在之前的博客《激光雷达坐标系、方向角和仰角》
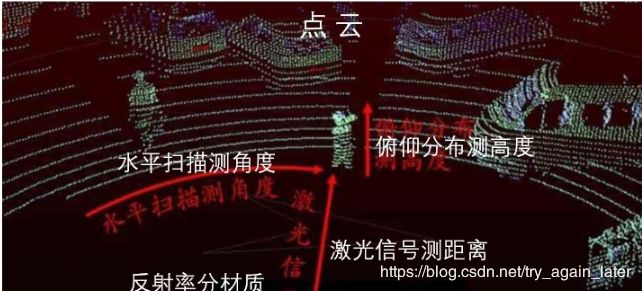
点云数据如下图所示,以Velodyne公司的64线激光雷达HDL_64E为例
- 64线表示64个发射接收机,每一时刻可以得到64个激光点,发射机的发射竖直角度在-24.8~~2度之间,竖直方向分辨率是0.4°
- 一列64个发射接收机绕着竖直方向旋转,采集一圈得到4500列激光点,水平方向上分辨率是0.08°。
- 每一个圆圈代表一个激光束旋转一周产生的数据
解决畸变首先计算采集过程中雷达的运动,然后在每帧激光点上补偿这个运动量。假设采集周期100ms内为匀速运动,可以采用旋转+平移补偿。
程序设计
增加的点云去除畸变操作只是在front_end_flow.cpp中的更新激光里程计函数UpdateLaserOdometry()中位姿估计之前进行了每一帧的点云去畸变操作。具体操作为:
// imu系转激光雷达系
current_velocity_data_.TransformCoordinate(imu_to_lidar_);
// 每帧点云处理畸变:先获得运动信息,再坐标转化
distortion_adjust_ptr_->SetMotionInfo(0.1, current_velocity_data_);
distortion_adjust_ptr_->AdjustCloud(current_cloud_data_.cloud_ptr, current_cloud_data_.cloud_ptr);
第一点,激光雷达扫描过程中采集的数据中提供的速度是IMU所处位置的速度,我们需要将其转化到激光雷达所处位置的速度(线速度+角速度)。
current_velocity_data_.TransformCoordinate(imu_to_lidar_);
这里速度转换,角速度直接根据imu_to_lidar_变换矩阵相乘即可,线速度需要先旋转再加上叉乘结果。
为此在include文件中专门定义了一个类VelocityData,里面包含线速度linear_velocity、角速度angular_velocity。以及类成员函数TransformCoordinate()
// imu转雷达坐标系:线速度、角速度
void VelocityData::TransformCoordinate(Eigen::Matrix4f transform_matrix) {
// 杆臂矩阵
Eigen::Matrix4d matrix = transform_matrix.cast<double>();
Eigen::Matrix3d t_R = matrix.block<3,3>(0,0);
// 角速度更新
Eigen::Vector3d w(angular_velocity.x, angular_velocity.y, angular_velocity.z);
w = t_R * w;
// 线速度先旋转
Eigen::Vector3d v(linear_velocity.x, linear_velocity.y, linear_velocity.z);
v = t_R * v;
// 再加上叉乘结果,杆臂速度=角速度 叉乘 杆臂
Eigen::Vector3d r(matrix(0,3), matrix(1,3), matrix(2,3));
Eigen::Vector3d delta_v;
delta_v(0) = w(1) * r(2) - w(2) * r(1);
delta_v(1) = w(2) * r(0) - w(0) * r(2);
delta_v(2) = w(1) * r(1) - w(1) * r(0);
v = v + delta_v;
angular_velocity.x = w(0);
angular_velocity.y = w(1);
angular_velocity.z = w(2);
linear_velocity.x = v(0);
linear_velocity.y = v(1);
linear_velocity.z = v(2);
}
将线速度和角速度从IMU系转化到激光雷达坐标系之后,需要进行点云去畸变操作。为此在models文件夹下专门建立一个文件夹scan_adjust,里面包含两个重要函数:获得运动信息SetMotionInfo()和去畸变AdjustCloud()。
// 每帧点云处理畸变:先获得运动信息,再坐标转化
distortion_adjust_ptr_->SetMotionInfo(0.1, current_velocity_data_);
distortion_adjust_ptr_->AdjustCloud(current_cloud_data_.cloud_ptr, current_cloud_data_.cloud_ptr);
去畸变scan_adjust
1.获取运动信息SetMotionInfo()
获取载体运动信息,角速度angular_rate_ 、速度velocity_分别用来计算相对角度和相对位移。
// 获得运动信息:线速度、角速度
void DistortionAdjust::SetMotionInfo(float scan_period, VelocityData velocity_data) {
scan_period_ = scan_period;
velocity_ << velocity_data.linear_velocity.x, velocity_data.linear_velocity.y, velocity_data.linear_velocity.z;
angular_rate_ << velocity_data.angular_velocity.x, velocity_data.angular_velocity.y, velocity_data.angular_velocity.z;
}
2.去除畸变AdjustCloud()
在已知载体运动信息,角速度和线速度之后,接下来要对每个扫描周期内激光点云进行补偿。载体运动过程中,每一列激光点的基准坐标系不同,所以我们需要在得到每个激光束接收时刻后,将激光点云转换到相对与初始时刻的相对运动即可,让此时激光点坐标乘上这个相对转换,就转换成了在初始坐标系下的激光点。
函数输入原始点云,输出去除畸变的点云。
bool DistortionAdjust::AdjustCloud(CloudData::CLOUD_PTR& input_cloud_ptr, CloudData::CLOUD_PTR& output_cloud_ptr)
0、预处理
初始化输入点云和输出点云。
// 输入、输出点云
CloudData::CLOUD_PTR origin_cloud_ptr(new CloudData::CLOUD(*input_cloud_ptr));// 原始点云是输入点云
output_cloud_ptr->points.clear();
float orientation_space = 2.0 * M_PI;// 方向角一圈 2*pi
float delete_space = 5.0 * M_PI / 180.0; // 过滤正负5度激光点
1、初始点云先旋转
通过atan2(y/x)第一个激光点的方位角,并以Z轴为旋转角,旋转弧度为方位角,得到旋转矩阵rotate_matrix。
对初始点云进行旋转pcl::transformPointCloud
更新线速度、角速度(旋转)
// 1.初始点云先旋转
// 起始点旋转矩阵
float start_orientation = atan2(origin_cloud_ptr->points[0].y, origin_cloud_ptr->points[0].x);// 起始点方位角(欧拉角) atan2(y/x)
Eigen::AngleAxisf t_V(start_orientation, Eigen::Vector3f::UnitZ()); // 旋转向量,以Z轴为旋转轴,旋转方位角弧度
Eigen::Matrix3f rotate_matrix = t_V.matrix();// 旋转矩阵
Eigen::Matrix4f transform_matrix = Eigen::Matrix4f::Identity();// 变换矩阵
transform_matrix.block<3,3>(0,0) = rotate_matrix.inverse();
// 原始点云旋转过后
pcl::transformPointCloud(*origin_cloud_ptr, *origin_cloud_ptr, transform_matrix);// 输入、输出、变换矩阵
// 线速度、角速度
velocity_ = rotate_matrix * velocity_;
angular_rate_ = rotate_matrix * angular_rate_;
2、后续点云去除畸变
- 获得每个激光点的方位角orientation并预处理
- 根据顺序扫描时间real_time对点云进行去畸变处理(旋转+平移)
- 点云去除畸变后旋转pcl::transformPointCloud
for (size_t point_index = 1; point_index < origin_cloud_ptr->points.size(); ++point_index) {
// 2.1 获得方位角及预处理
float orientation = atan2(origin_cloud_ptr->points[point_index].y, origin_cloud_ptr->points[point_index].x);// 顺序扫描角度,方位角
if (orientation < 0.0)// 保证角度都是正的
orientation += 2.0 * M_PI;
if (orientation < delete_space || 2.0 * M_PI - orientation < delete_space)// 过滤了+-5度的点
continue;
// 2.2 根据顺序扫描时间对点云进行去畸变处理(旋转+平移)
// 减去scan_period/2,把点云转换到该帧采集的中间时刻上去
// bag里点云的时刻是该帧点云起始时刻和终止时刻的平均值
float real_time = fabs(orientation) / orientation_space * scan_period_ - scan_period_ / 2.0;
Eigen::Vector3f origin_point(origin_cloud_ptr->points[point_index].x,
origin_cloud_ptr->points[point_index].y,
origin_cloud_ptr->points[point_index].z);
Eigen::Matrix3f current_matrix = UpdateMatrix(real_time);// 根据运行时间获得当前旋转矩阵
Eigen::Vector3f rotated_point = current_matrix * origin_point;// 旋转矩阵*三维点
Eigen::Vector3f adjusted_point = rotated_point + velocity_ * real_time;// 旋转+平移
CloudData::POINT point;
point.x = adjusted_point(0);
point.y = adjusted_point(1);
point.z = adjusted_point(2);
output_cloud_ptr->points.push_back(point);
}
// 2.3 点云去除畸变后旋转
pcl::transformPointCloud(*output_cloud_ptr, *output_cloud_ptr, transform_matrix.inverse());
return true;
}
获得当前旋转矩阵UpdateMatrix()
由顺序扫描时间和角速度 获得当前扫描的角度,然后通过旋转向量Z-Y-X,最后转化为旋转矩阵。
// 已知运行时间获得旋转矩阵
Eigen::Matrix3f DistortionAdjust::UpdateMatrix(float real_time) {
// 角度=角速度*运行时间
Eigen::Vector3f angle = angular_rate_ * real_time;
// 旋转向量z-y-x
Eigen::AngleAxisf t_Vz(angle(2), Eigen::Vector3f::UnitZ());
Eigen::AngleAxisf t_Vy(angle(1), Eigen::Vector3f::UnitY());
Eigen::AngleAxisf t_Vx(angle(0), Eigen::Vector3f::UnitX());
Eigen::AngleAxisf t_V;
t_V = t_Vz * t_Vy * t_Vx;
// 转为旋转矩阵
return t_V.matrix();
}
Eigen库中各种形式的表示如下:
旋转矩阵(3X3):Eigen::Matrix3d
旋转向量(3X1):Eigen::AngleAxisd
四元数(4X1):Eigen::Quaterniond
平移向量(3X1):Eigen::Vector3d
变换矩阵(4X4):Eigen::Isometry3d
仿射变换Affine3f进行点云变换。
Eigen::Affine3f transform_2 = Eigen::Affine3f::Identity();
// 在 X 轴上定义一个 2.5 米的平移.
transform_2.translation() << 2.5, 0.0, 0.0;
// 和前面一样的旋转; Z 轴上旋转 theta 弧度
transform_2.rotate (Eigen::AngleAxisf (theta, Eigen::Vector3f::UnitZ()));
// 执行变换,并将结果保存在新创建的 transformed_cloud 中
pcl::PointCloud<pcl::PointXYZ>::Ptr transformed_cloud (new pcl::PointCloud<pcl::PointXYZ> ());
// pcl库实现点云变化
pcl::transformPointCloud (*source_cloud, *transformed_cloud, transform_2);
获得AngleAxisd旋转向量
//1.使用旋转的角度和旋转轴向量(此向量为单位向量)来初始化角轴
AngleAxisd V1(M_PI / 4, Vector3d(0, 0, 1));//以(0,0,1)为旋转轴,旋转45度
cout << "Rotation_vector1" << endl << V1.matrix() << endl;
参考:
https://zhuanlan.zhihu.com/p/109379384