stm32f1系列单片机实战应用
最近有一个小项目,测量运动自行车速度,上传给上位机软件,处理VR视频播放。正好公司有现成的stm32f1系列单片机开发板,所以我就想到了使用它来实现这个小功能。
1. 硬件配置:
1.1. 运动自行车;

1.2. 磁感应开关与专用磁铁;


1.3. 基于Stm32f103zet6芯片的开发板(七星虫),如下图;

1.4. 连接线若干;
1.5. miniusb线缆,用于给开发板供电及串口通信。

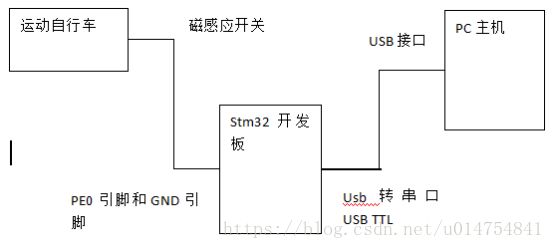
2. 系统描述与框图:
运动自行车车轮上安装5只磁铁,通过磁感应开关检测磁铁产生信号,接入stm32开发板PE0引脚。测量出的速度值通过串口发送给PC上位机软件(mini usb线缆连接)。硬件框图如下:
3. 软件实现
3.1.设定开发板PE0引脚下降沿中断,在引脚中断服务函数里累计中断次数(即磁感应开关感应到磁铁的次数),同时每累计10次LED2交换一次状态。外部初始化代码及中断服务函数如下:
void EXTIX_Init(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 引脚端口初始化 PE0
GPIO_InitStructure.GPIO_Pin = DEF_BIT_00;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOE, &GPIO_InitStructure);
// 启 AFIO 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//GPIOE.0 中断线以及中断初始化配置,下降沿触发
GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource0);// 配置中断线为0
EXTI_InitStructure.EXTI_Line=EXTI_Line0;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; // 下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure); // 初始化中断线参数
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //使能按键外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级 2,
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02; //子优先级 2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); // 初始化 NVIC
}
// 外部中断0服务程序
long long lSpeedCnt = 0;
void EXTI0_IRQHandler(void)
{
OSIntEnter(); // 告诉ucosii系统进入中断
if(GPIO_ReadInputDataBit(GPIOE, DEF_BIT_00)==0) // PE0检测到下降沿
{
// 累计中断次数,每隔10次改变led1状态
if(!((lSpeedCnt++)%10))
{
BSP_LED_Toggle(2);
}
}
EXTI_ClearITPendingBit(EXTI_Line0); // 清除LINE0上的中断标志位
OSIntExit // 告诉ucosii系统退出中断
}3.2.在启用一个定时器中断,周期为1s,在定时器中断服务函数里计算自行车的速度。计算方式如下:v = p / μ * C,其中:v是速度:m/s,p是磁感应开关感应频率, μ为车轮上安装磁铁个数:5,C为自行车车轮周长:1.38m。定时器中断初始化代码及中断服务函数如下:
/*******************************************************************************
* Function Name : BSP_TIM2_Init
* Description : Compute return latest speed measurement
* Input : None
* Output : s16
* Return : Return the speed in 0.1 Hz resolution.
*******************************************************************************/
static void BSP_TIM2_Init(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef bsp_tim2_init;
//使能TIM2时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_DeInit(TIM2);
TIM_TimeBaseStructInit(&bsp_tim2_init);
//TIM2初始化
bsp_tim2_init.TIM_Prescaler = psc; //时钟预分频 定时器每隔 (psc+1)/72 us计数一次
bsp_tim2_init.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
bsp_tim2_init.TIM_Period = arr; //计数满(arr+1)次更新重装载寄存器数据
bsp_tim2_init.TIM_ClockDivision = TIM_CKD_DIV1; //时钟不分频
// bsp_tim2_init.TIM_RepetitionCounter = ; //高级定时器用,这里不需设置
TIM_TimeBaseInit(TIM2, &bsp_tim2_init); //初始化定时器
//设置定时器TIM2中断
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //设置定时器更新中断
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除中断标志,防止刚上电时进一次中断
//初始化中断
BSP_NVIC_Init(TIM2_IRQn, 3, 3);
//使能定时器TIM2
TIM_Cmd(TIM2, ENABLE);
}
long long lvalCur;
long long lValPrev;
float fSpeedVal;
void TIM2_IRQHandler(void)
{
OSIntEnter(); // 告诉ucosii系统进入中断
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
extern long long lSpeedCnt;
lvalCur = lSpeedCnt;
fSpeedVal = (float)lvalCur - (float)lValPrev;
fSpeedVal /= 5.0;
fSpeedVal *= 1.38;
lValPrev = lvalCur;
TIM_ClearFlag(TIM2, TIM_IT_Update);
}
OSIntExit(); // 告诉ucosii系统退出中断
}
3.3.系统共有两个任务,其中一个任务每50ms发送一次速度值给PC机,另一个控制LED1闪烁,周期100ms,用于指示系统正常运行。
第一个任务中运行代码如下:
while(DEF_TRUE)
{
extern float fSpeedVal;
if((int)(fSpeedVal*100) > 9999)
{
printf("9999");
}
else if((int)(fSpeedVal*100) > 999)
{
printf("%d",(int)(fSpeedVal*100));
}
else if((int)(fSpeedVal*100) > 99)
{
printf("0%d",(int)(fSpeedVal*100));
}
else if((int)(fSpeedVal*100) > 9)
{
printf("00%d",(int)(fSpeedVal*100));
}
else
{
printf("000%d",(int)(fSpeedVal*100));
}
OSTimeDlyHMSM(0, 0, 0, 80);
} 第二个任务中代码如下:
while (DEF_TRUE)
{
BSP_LED_Toggle(1);
OSTimeDlyHMSM(0, 0, 0, 100);
}