数字图像处理阅读笔记
数字图像处理-阅读笔记day1
- 数字图像处理基本步骤
- 第二章数字图像基础
- 图像的获取
- 数字图像表示
- 空间和灰度分辨率
- 图像内插
- 像素间的一些基本关系
- 相邻像素
- 邻接性、连通性、区域和边界
近期在看数字图像处理,所以趁机会做下阅读过程中的笔记,属于小白笔记,目的主要是方便自己回顾知识,内容比较精简,我省略我认为不太重要的内容(一点点看有点累,跳过不必要内容,内容肯定定有点疏漏,主体内容我会保留),并写了点自己笔记。
数字图像处理基本步骤
- 首先明确数字图像基本概念:如果一幅图像可以被二维函数f(x,y)表示,其中(x,y)是空间(平面)上的空间坐标,而f(x,y)是该点处的强度(灰度),且x,y,f(x,y)是有限的离散值时,称该图像为数字图像。而哪些有限数量元素称为像素(它是一个抽象概念)。
知道什么是数字图像,接下来就要清楚数字图像处理都有哪些处理方法模块:
来自《数字图像处理》的图1.23

这就是本书主干结构
首先图像处理还分了三个等级,低级处理;中级处理;高级处理;低级处理就是输入是图像输出也是图像(图像缩放)中级处理是输入是图像,输出是图像中提取的特征(边缘,轮廓等)。高级处理 那就是
比中级处理更牛了,不光知道图像特征,还能达到理解"图像内容"的达到认知水平了。
结合图可以知道第2~9章是初级处理,9 ~12 是中级处理。
然后各章大概内容:
- 图像获取 :图像的预处理,(缩小、放大等)
- 图像增强:把你感兴趣的图像信息,尽可能的"放大",它是一种偏主观因素的处理手段。
- 图像复原: 把有噪声的图像恢复成原来的样子,客观处理手段,没有主观内容在里面。
- 彩色图像处理:比灰度图像,多了几个通道,介绍彩色模型和数字域彩色处理。
- 小波 :以不同分辨率来描述图像的基础。(书中原话)
- 压缩:减少图像存储量或降低传输图像带宽的处理(原话)
- 形态学处理: 中级处理的开端,它是提取图像成分的工具(原话)
- 分割:将一幅图像划分成组成成分和目标,分割越准确,识别越成功(人脸识别就是先把你脸分割出来在处理)
- 表示和描述:几乎总在分割之后,分割后需要表示分割内容,结合你感兴趣内容进行表示(纹理或骨架),表示完了还要描述,又叫特征选择,包括提取特征,得到感兴趣定量信息等。
- 识别: 基于目标描述给该目标赋予标志的过程。
第二章数字图像基础
图像的获取
图像的获取有多种方法,但主要目的都是相同的及都是把,感知到的数据生成数字图像。把连续感知到的数据转换成数字图像需要两种处理 取样和量化。
来自《数字图像处理》的图2.16
该图是为了描述,取样和量化的基本概念:左上图的连续的图像,然后把它的图像灰度值f(x,y)映射成曲线,然后左下的图就是取样了,在每个等刻度下进行取样,取样后样本值是离散的,为了形成数字图像灰度值也应该是也是离散的,右侧根据取样后量化的8个离散区间的灰度标尺,范围从黑到白。
来自《数字图像处理》的图2.17

左侧是投影到一个传感器阵列上的连续图像,右侧就是取样和量化后的结果,数字图像的质量在很大程度上取决于取样和量化中所用的样本数和灰度级。
数字图像表示
令f(s,t)表示一幅两个连续变量s和t的连续图像函数,通过取样和量化转换为数字图像。
把连续图像取样为一个二维阵列f(x,y)(从两个维度取样)。由一幅图像的坐标张成的实平面部分称为空间域,x和y称为空间变量或空间坐标。
灰度值与该点处的f值成正比。
我们可以知道数字图像表示需要:x,y指定空间域的大小,还有灰度级数L,就是上节中的灰度级数8
通常灰度级数取为2的整数次幂,即:
L = 2 k L=2^k L=2k
图像系统的动态范围定义为系统中最大可度量灰度与最小可检测灰度之比。
原则上,上限取决于饱和度,下限取决于噪声。这一概念紧密联系的是图像对比度,图像中最高和最低灰度级之差定义为图像对比度。高对比度自然图像层次分明。
存储数字图像所需的比特数b为:
b = M ∗ N ∗ k b=M*N*k b=M∗N∗k
M和N就是我们空间域的大小,k则定义的灰度级范围。
空间和灰度分辨率
空间分辨率:图像可辨别最小细节度量,好比给你一张纸,你在纸上画一条条垂线,单位距离(mm)内画的垂线的条数越高,你的空间分辨率就越高。还有一种是dpi单位度量,每英寸(1英寸=2.54厘米)内能出现多少个“点”或像素。比如《数字图像处理》这本书有2044dpi(很高)代表 1平方英寸有4177936个像素。普通杂志是133dpi,(间接说明这本书比较贵是有道理的。。)
灰度分辨率:就是 L = 2 k L=2^k L=2k中的k,比如一幅被量化的256级的图像有8比特的灰度分辨率。
降低图像空间分辨率会使图像缩小,为了恢复成原图就需要放大操作。这就需要使用图像内插操作了。
图像内插
比如一幅图像是500500像素,你像放大成700700像素,基本想法是先找一个700700的网格,将其缩小为与500500图像完全贴合,显然收缩后的图像要跟密集些,有些值是没有灰度值的,需要你赋值,你赋值肯定是和它最接近的像素有关,最简单一种是那个离它最近,这个灰度值就等于那个离它最近的灰度值。这种方法叫做最近邻内插,
双线性内插:操作也是一样的就是赋值的方式不一样,用最邻近的四个点去,决定该点灰度值:
v ( x , y ) = a x + b y + c x y + d v(x,y)=ax+by+cxy+d v(x,y)=ax+by+cxy+d
用那四个点解方程,得四个参数,在将(x,y)代入表达式得该点灰度值,效果肯定比上一种要好。
双三次内插:也是赋值方式不同,这次是解16个系统的方程
v ( x , y ) = ∑ i = 0 3 ∑ j = 0 3 a i j x i y j v(x,y)=\sum_{i=0}^{3}\sum_{j=0}^{3}a_{ij}x^{i}y^{j} v(x,y)=i=0∑3j=0∑3aijxiyj
Photoshop就是用这种来放大图像,当然效果比前二个更好。
关于内插,还有更加复杂的应用于医学图像处理方面,要求的精度就更高了,例如采用样条和小波。
像素间的一些基本关系
相邻像素
4领域 N 4 ( P ) N_{4}(P) N4(P):蓝色格子就是它的4领域

N D ( P ) N_{D}(P) ND(P)对应它四个对角

8领域 N 8 ( P ) N_{8}(P) N8(P):
N 8 ( P ) N_{8}(P) N8(P)= N D ( P ) N_{D}(P) ND(P)+ N 4 ( P ) N_{4}(P) N4(P)

邻接性、连通性、区域和边界
v是定义邻接性灰度值的集合
4邻接:q在集合 N 4 ( P ) N_4(P) N4(P),且它们灰度值都在v集合中,则p和q是4邻接的。
8邻接:q在集合 N 8 ( P ) N_8(P) N8(P),且它们灰度值都在v集合中,则p和q是8邻接的。
m邻接:q在集合 N 4 ( P ) N_4(P) N4(P)或q在集合 N D ( P ) N_D(P) ND(P)上,
且集合 N 4 ( P ) ⋂ N_4(P)\bigcap N4(P)⋂ N 4 ( q ) N_4(q) N4(q)中没有来自v中数值的像素,则p和q是m邻接
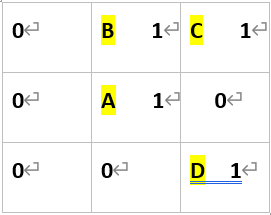
毫无疑问 当邻接类型为8邻接时,A和C是相邻的,及它们可以直接到达对方,
当邻接类型为m邻接时,A和C是不相邻的,因为它们不满足条件 N 4 ( A ) ⋂ N_4(A)\bigcap N4(A)⋂ N 4 ( C ) N_4(C) N4(C)中没有来自v中数值的像素,显然B的灰度值1在v={1}中,所以它们不可以直接到达对方,只能通过B来到达。
我们把A->B->C这样的路称为通路,
区域:S是图像一个像素子集,S的全部像素之间存在一个通路,且仅有一个连通分量,则S称为连通集,也叫邻接区域,若存在多个连通分量,则S称为不邻接区域。

上图蓝色的集合S是满足区域概念。首先像素的灰度值为1的点均可以达到(存在一条通路),且它是一个连通分量,属于邻接区域。

上图蓝色集合S,虽然像素的灰度值为1的点均可以达到,但它有两个连通分量,属于不邻接区域。
注意的是在确定区域概念时,必须指明是考虑4邻接还是8邻接或m邻接,因为如上文讲到,A和C在8邻接是相邻的,但是m邻接是不相邻的
边界(边缘或轮廓) 比如区域R的边界指:R区域点中与R补集至少有一个或多个相邻点的点的集合。
内容较多,后面笔记在下篇博客写。以上如果不对地方,恳请批评指正,谢谢大家。