Tensorflow -- RNN简单实现
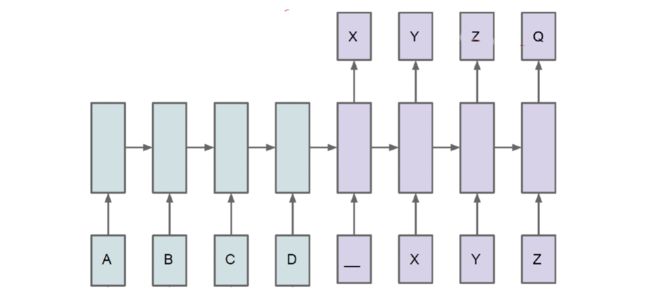
RNN和传统多层感知机的不同在于增加了时间序列。
tensor flow v1.3
# -*- coding:UTF-8 -*-
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
def gen_data(size=100000):
"""
生成数据:
输入数据X:在时间t,Xt的值有50%的概率为1,50%的概率为0;
输出数据Y:在实践t,Yt的值有50%的概率为1,50%的概率为0,除此之外,如果`Xt-3 == 1`,Yt为1的概率增加50%, 如果`Xt-8 == 1`,则Yt为1的概率减少25%, 如果上述两个条件同时满足,则Yt为1的概率为75%。
"""
X = np.random.choice(2,(size,))
Y = []
for i in range(size):
threshold = 0.5
# 判断X[i-3]和X[i-8]是否为1,修改阈值
if X[i-3] == 1:
threshold += 0.5
if X[i-8] == 1:
threshold -= 0.25
# 生成随机数,以threshold为阈值给Yi赋值
if np.random.rand() > threshold:
Y.append(0)
else:
Y.append(1)
return X,np.array(Y)
def gen_batch(raw_data,batch_size,num_steps):
# raw_data是使用gen_data()函数生成的数据,分别是X和Y
raw_x,raw_y = raw_data
data_length = len(raw_x)
# 首先将数据切分成batch_size份,0-batch_size,batch_size-2*batch_size。。。
batch_partition_length = data_length // batch_size
data_x = np.zeros([batch_size,batch_partition_length],dtype=np.int32)
data_y = np.zeros([batch_size,batch_partition_length],dtype=np.int32)
# 因为RNN模型一次只处理num_steps个数据,所以将每个batch_size在进行切分成epoch_size份,每份num_steps个数据。注意这里的epoch_size和模型训练过程中的epoch不同。
for i in range(batch_size):
data_x[i] = raw_x[i*batch_partition_length:(i+1)*batch_partition_length]
data_y[i] = raw_y[i*batch_partition_length:(i+1)*batch_partition_length]
# x是0-num_steps, batch_partition_length -batch_partition_length +num_steps。。。共batch_size个
epoch_size = batch_partition_length // num_steps
for i in range(epoch_size):
x = data_x[:,i*num_steps:(i+1)*num_steps]
y = data_y[:,i*num_steps:(i+1)*num_steps]
yield (x,y)
def gen_epochs(n,num_steps):
'''这里的n就是训练过程中用的epoch,即在样本规模上循环的次数'''
for i in range(n):
yield gen_batch(gen_data(),batch_size,num_steps=num_steps)
batch_size = 5
num_steps = 10
state_size = 10
n_classes = 2
learning_rate = 0.1
x = tf.placeholder(tf.int32,[batch_size,num_steps])
y = tf.placeholder(tf.int32,[batch_size,num_steps])
#RNN的初始化状态,全设为零。注意state是与input保持一致,接下来会有concat操作,所以这里要有batch的维度。即每个样本都要有隐层状态
init_state = tf.zeros([batch_size,state_size])
#定义rnn_cell的权重参数,
# with tf.variable_scope('rnn_cell'):
# W = tf.get_variable('W',[n_classes +state_size,state_size])
# b = tf.get_variable('b',[state_size],initializer=tf.constant_initializer(0.0))
#使之定义为reuse模式,循环使用,保持参数相同
# def rnn_cell(rnn_input,state):
# with tf.variable_scope('rnn_cell',reuse=True):
# W = tf.get_variable('W', [n_classes + state_size, state_size])
# b = tf.get_variable('b', [state_size], initializer=tf.constant_initializer(0.0))
# 定义rnn_cell具体的操作,这里使用的是最简单的rnn,不是LSTM
# return tf.tanh(tf.matmul(tf.concat((rnn_input,state),1),W)+b)
# state = init_state
# rnn_outputs = []
#循环num_steps次,即将一个序列输入RNN模型
# for rnn_input in rnn_inputs:
# state = rnn_cell(rnn_input,state)
# rnn_outputs.append(state)
# final_state = rnn_outputs[-1]
# 使用封装的cell
cell = tf.contrib.rnn.BasicRNNCell(state_size)
# 定义cell
#将输入转化为one-hot编码,两个类别。[batch_size, num_steps, num_classes]
# x_one_hot = tf.one_hot(x,n_classes)
#将输入unstack,即在num_steps上解绑,方便给每个循环单元输入。这里可以看出RNN每个cell都处理一个batch的输入(即batch个二进制样本输入)
# rnn_inputs = tf.unstack(x_one_hot,axis=1)
# rnn_outputs,final_state = tf.contrib.rnn.static_rnn(cell,rnn_inputs,initial_state=init_state)
rnn_inputs = tf.one_hot(x,n_classes)
rnn_outputs,final_state = tf.nn.dynamic_rnn(cell,rnn_inputs,initial_state=init_state)
#定义softmax层
with tf.variable_scope('softmax'):
W = tf.get_variable('W',[state_size,n_classes])
b = tf.get_variable('b',[n_classes])
# 使用静态RNN
# # rnn_outputs,final_state = tf.contrib.rnn.static_rnn(cell,rnn_inputs,initial_state=init_state)
#注意,这里要将num_steps个输出全部分别进行计算其输出,然后使用softmax预测
# logits = [tf.matmul(rnn_output,W)+b for rnn_output in rnn_outputs]
# predictions = [tf.nn.softmax(logit) for logit in logits]
# Turn our y placeholder into a list of labels
# y_as_lists = tf.unstack(y,num=num_steps,axis=1)
#losses and train_step
# losses = [tf.nn.sparse_softmax_cross_entropy_with_logits(labels=label,logits=logit) for label,logit in zip(y_as_lists,predictions)]
# total_loss = tf.reduce_mean(losses)
# train_step = tf.train.GradientDescentOptimizer(learning_rate).minimize(total_loss)
# 使用动态rnn时改为下面的代码
logits = tf.reshape(
tf.matmul(tf.reshape(rnn_outputs, [-1, state_size]), W) + b,
[batch_size, num_steps, n_classes])
predictions = tf.nn.softmax(logits)
losses = tf.nn.sparse_softmax_cross_entropy_with_logits(labels=y, logits=logits)
total_loss = tf.reduce_mean(losses)
train_step = tf.train.AdagradOptimizer(learning_rate).minimize(total_loss)
def train_network(num_epochs,num_steps,state_size,verbose=True):
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
training_losses = []
# 得到数据
for idx,epoch in enumerate(gen_epochs(num_epochs,num_steps)):
training_loss = 0
# 保存每次执行后的最后状态,然后赋给下一次执行
training_state = np.zeros((batch_size,state_size))
if verbose:
print('\EPOCH', idx)
# 这是具体获得数据的部分
for step,(X,Y) in enumerate(epoch):
tr_losses, training_loss_, training_state, _ = \
sess.run([losses,
total_loss,
final_state,
train_step],
feed_dict={x: X, y: Y, init_state: training_state})
training_loss += training_loss_
if step % 100 == 0 and step > 0:
if verbose:
print("Average loss at step", step,
"for last 100 steps:", training_loss / 100)
training_losses.append(training_loss / 100)
training_loss = 0
return training_losses
training_losses = train_network(1, num_steps,state_size)
plt.plot(training_losses)
plt.show()发现动态RNN训练过程中,相同step训练得到的结果更好。
Ref:
http://blog.csdn.net/Dark_Scope/article/details/47056361
使用Tensorflow实现简单的RNN
http://blog.csdn.net/liuchonge/article/details/70809288