机器学习第三课第二部分(SVD)

一、奇异值与特征值基础知识:
特征值分解和奇异值分解在机器学习领域都是属于满地可见的方法。两者有着很紧密的关系,我在接下来会谈到,特征值分解和奇异值分解的目的都是一样,就是提取出一个矩阵最重要的特征。先谈谈特征值分解吧:
1)特征值:
如果说一个向量v是方阵A的特征向量,将一定可以表示成下面的形式:

这时候λ就被称为特征向量v对应的特征值,一个矩阵的一组特征向量是一组正交向量。特征值分解是将一个矩阵分解成下面的形式:

其中Q是这个矩阵A的特征向量组成的矩阵,Σ是一个对角阵,每一个对角线上的元素就是一个特征值。我这里引用了一些参考文献中的内容来说明一下。首先,要明确的是,一个矩阵其实就是一个线性变换,因为一个矩阵乘以一个向量后得到的向量,其实就相当于将这个向量进行了线性变换。比如说下面的一个矩阵:
 它其实对应的线性变换是下面的形式:
它其实对应的线性变换是下面的形式:
 因为这个矩阵M乘以一个向量(x,y)的结果是:
因为这个矩阵M乘以一个向量(x,y)的结果是:
 上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时,是拉长,当值<1时时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:
上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时,是拉长,当值<1时时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:

它所描述的变换是下面的样子:

这其实是在平面上对一个轴进行的拉伸变换(如蓝色的箭头所示),在图中,蓝色的箭头是一个最主要的变化方向(变化方向可能有不止一个),如果我们想要描述好一个变换,那我们就描述好这个变换主要的变化方向就好了。反过头来看看之前特征值分解的式子,分解得到的Σ矩阵是一个对角阵,里面的特征值是由大到小排列的,这些特征值所对应的特征向量就是描述这个矩阵变化方向(从主要的变化到次要的变化排列)
当矩阵是高维的情况下,那么这个矩阵就是高维空间下的一个线性变换,这个线性变化可能没法通过图片来表示,但是可以想象,这个变换也同样有很多的变换方向,我们通过特征值分解得到的前N个特征向量,那么就对应了这个矩阵最主要的N个变化方向。我们利用这前N个变化方向,就可以近似这个矩阵(变换)。也就是之前说的:提取这个矩阵最重要的特征。总结一下,特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多重要,而特征向量表示这个特征是什么,可以将每一个特征向量理解为一个线性的子空间,我们可以利用这些线性的子空间干很多的事情。不过,特征值分解也有很多的局限,比如说变换的矩阵必须是方阵。
2)奇异值:
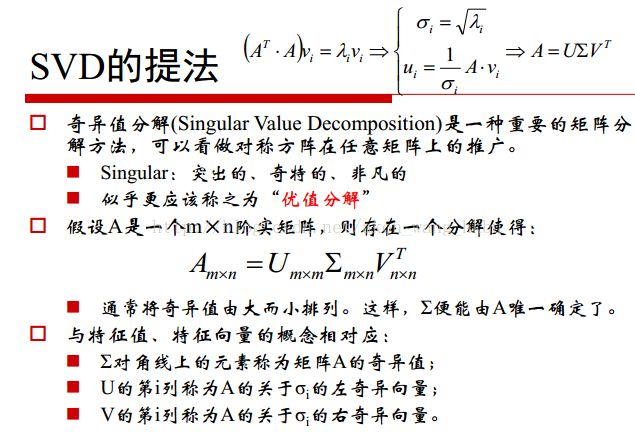
下面谈谈奇异值分解。特征值分解是一个提取矩阵特征很不错的方法,但是它只是对方阵而言的,在现实的世界中,我们看到的大部分矩阵都不是方阵,比如说有N个学生,每个学生有M科成绩,这样形成的一个N * M的矩阵就不可能是方阵,我们怎样才能描述这样普通的矩阵呢的重要特征呢?奇异值分解可以用来干这个事情,奇异值分解是一个能适用于任意的矩阵的一种分解的方法:
 假设A是一个M * N矩阵,那么得到的U是一个M * M的方阵(里面的向量是正交的,U里面的向量称为左奇异向量),Σ是一个M * N的矩阵(除了对角线的元素都是0,对角线上的元素称为奇异值),V’(V的转置)是一个N * N的矩阵,里面的向量也是正交的,V里面的向量称为右奇异向量),从图片来反映几个相乘的矩阵的大小可得下面的图片
假设A是一个M * N矩阵,那么得到的U是一个M * M的方阵(里面的向量是正交的,U里面的向量称为左奇异向量),Σ是一个M * N的矩阵(除了对角线的元素都是0,对角线上的元素称为奇异值),V’(V的转置)是一个N * N的矩阵,里面的向量也是正交的,V里面的向量称为右奇异向量),从图片来反映几个相乘的矩阵的大小可得下面的图片

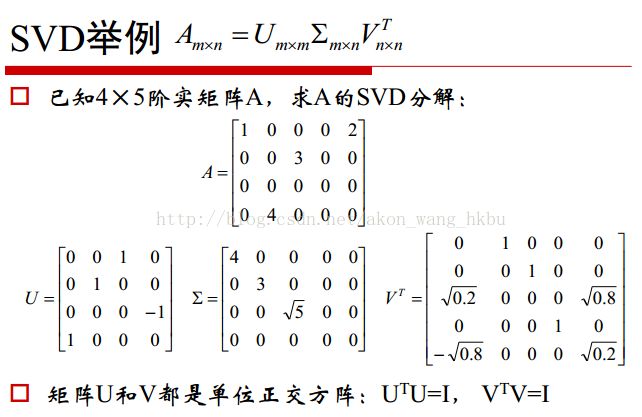
那么奇异值和特征值是怎么对应起来的呢?首先,我们将一个矩阵A的转置 * A,将会得到一个方阵,我们用这个方阵求特征值可以得到: 这里得到的v,就是我们上面的右奇异向量。此外我们还可以得到:
这里得到的v,就是我们上面的右奇异向量。此外我们还可以得到:
 这里的σ就是上面说的奇异值,u就是上面说的左奇异向量。奇异值σ跟特征值类似,在矩阵Σ中也是从大到小排列,而且σ的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上了。也就是说,我们也可以用前r大的奇异值来近似描述矩阵,这里定义一下部分奇异值分解:
这里的σ就是上面说的奇异值,u就是上面说的左奇异向量。奇异值σ跟特征值类似,在矩阵Σ中也是从大到小排列,而且σ的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上了。也就是说,我们也可以用前r大的奇异值来近似描述矩阵,这里定义一下部分奇异值分解:

r是一个远小于m、n的数,这样矩阵的乘法看起来像是下面的样子:

右边的三个矩阵相乘的结果将会是一个接近于A的矩阵,在这儿,r越接近于n,则相乘的结果越接近于A。而这三个矩阵的面积之和(在存储观点来说,矩阵面积越小,存储量就越小)要远远小于原始的矩阵A,我们如果想要压缩空间来表示原矩阵A,我们存下这里的三个矩阵:U、Σ、V就好了。
在python代码中我们先会用包将一张图片分成U,sigma和V:
u_r, sigma_r, v_r = np.linalg.svd(a[:, :, 0])
u_g, sigma_g, v_g = np.linalg.svd(a[:, :, 1])
u_b, sigma_b, v_b = np.linalg.svd(a[:, :, 2])def restore1(sigma, u, v, K): # 奇异值、左特征向量、右特征向量
m = len(u)
n = len(v[0])
a = np.zeros((m, n))
for k in range(K):
uk = u[:, k].reshape(m, 1)
vk = v[k].reshape(1, n)
a += sigma[k] * np.dot(uk, vk)
a[a < 0] = 0
a[a > 255] = 255
# a = a.clip(0, 255)
return np.rint(a).astype('uint8') for k in range(1, K+1):
print k
R = restore1(sigma_r, u_r, v_r, k)
G = restore1(sigma_g, u_g, v_g, k)
B = restore1(sigma_b, u_b, v_b, k)
I = np.stack((R, G, B), axis=2)
Image.fromarray(I).save('%s\\svd_%d.png' % (output_path, k))
if k <= 12:
plt.subplot(3, 4, k)
plt.imshow(I)
plt.axis('off')
plt.title(u'奇异值个数:%d' % k)
plt.suptitle(u'SVD与图像分解', fontsize=20)
plt.tight_layout(0.3, rect=(0, 0, 1, 0.92))
# plt.subplots_adjust(top=0.9)
plt.show() 完整代码:https://github.com/wangxupeng/master-degree/tree/master/machine%20learning/SVD
http://blog.csdn.net/zhongkejingwang/article/details/43053513 这篇博客讲SVD概念讲的很好

题目对应的python代码:
import numpy as np
if __name__ == '__main__':
A = [4,0,3,-5]
A = np.array(A).reshape(2,2)
print("原始矩阵:\n",A)
Am = np.dot(A.T,A)
print("A的转置乘以A\n:",Am)
e_value, e_vector = np.linalg.eig(Am)
print("特征值\n:",e_value)
sqrt_sigma = np.sqrt(e_value)
print("根号sigma:\n",sqrt_sigma)
S = np.diag(sqrt_sigma)
S = np.linalg.inv(S)
V=e_vector
print("根号sigma的逆:\n",S)
print("特征值V:\n", V)
print("V的转置:\n",V.T)
U = np.dot(np.dot(A,V),S)
print("矩阵U:\n", U)
A_bar = np.dot(np.dot(U,np.linalg.inv(S)),V.T)
print("还原的矩阵A:\n",A_bar)