三大自动驾驶方案
自动驾驶被业界视为下一代车辆技术发展的最大挑战,目前各家车厂无不针对自动驾驶情境发展对应的技术,而这些技术包含了
环境感测能力、核心计算能力以及汽车如何与环境互动并自主进行判断的网络通信及决策能力。

图丨特斯拉的自动驾驶
而为了很好的去解决汽车判断复杂交通环境的计算力需求,芯片方案的选择对厂商来说至关重要。目前支持到 L2 计算处理的 ADAS 方案虽然不少,但是 L3 以上,选择就真的很有限了。
受限于法规完善,实际上路的车种只能发挥到最多 L3 的程度,且驾驶人必须随时做好介入的准备。
换言之,目前为止,自动驾驶对人类而言,也不过只是作为辅助,而不是真正取代人类驾驶,而这也是未来两年内最快进入主流市场的自动驾驶级别。
然而 L3 虽然只和 L2 相差一级,但其牵扯到的计算需求却有天壤之别。L2 和 L3 对车辆的自动控制能力虽然相去不远,但 L3 允许限定条件下的自动驾驶,其需要能够判断车身周围车道的绝大多数状况,并同时代替驾驶员做出行进中的各种决策,
而这个决策的过程,就需要极为庞大的计算能力在背后支持。

图丨 Mobileye
在 L2 之前,由于主要是集中在视觉计算的部分,所以各家方案也都朝这个方向发展,比如说 Mobileye,在被英特尔并购之前,主要就是供应以视觉计算为主的方案,并吃掉了绝大部分的相关方案市场。
但随着汽车产业往更高级别自动驾驶发展,Mobileye 在策略推理方案的缺乏,就成了限制其未来发展的最大瓶颈,而对此有需求的特斯拉,其实也是因为这个原因才抛弃 Mobileye,而非几次的车祸事故就决定分手。
考虑到 2020 年,甚至部分调研机构认为 2025 年之前,由于法规和相关方案发展上的限制,L4 甚至 L5 级别的完全自动驾驶能力要上路恐怕还是不可能的任务,因此未来数年,L3 级别的自动驾驶方案将会成为各家包括车厂、IC 设计公司以及方案公司竞逐的目标市场,而 DT 君认为,
即将到来的 CES 2018,就是个观察各家方案公司动向的重要场合。

根据消息,包含英特尔、高通,甚至 NVIDIA、TI,都将在 CES 2018 宣布其自动驾驶方案的最新布局,重点也都将会摆在最早可以上路的 L3 级别自动驾驶。
NVIDIA 全力推动自驾技术发展,将可能从重视延续性的可升级设计着手
NVIDIA 加入自动驾驶市场的竞争对 Mobileye 造成很大的压力,而其方案设计上的方向不同,也是特斯拉后来选择 NVIDIA,抛弃 Mobileye 的原因之一。
NVIDIA 可说是业界最早提出自动驾驶“决策”方案的公司,
不过达成决策依靠的并不是 GPU,而是 CPU,所以从最早的 Drive CX 到最新的 Xavier 平台,NVIDIA 都用上了 ARM 架构核心,在 Drive PX2 上用了 6 核心处理器,其中 2 个是由 NVIDIA 深度定制化的 Denvor 核心,4 个是标准的 Cortex-A57。Xavier 则是使用了 8 个深度定制化的 ARM 核心。
凭借这些在计算能力经过 NVIDIA 大幅强化的核心,其驾驶方案可以在非常短的时间内就统合 GPU 部分计算出来的视觉处理数据,并进行决策的判断。
Xavier 是 NVIDIA 在 CES 2017 宣布的自动驾驶方案,其不仅大幅强化计算能力,也同时借助更好的半导体工艺,将功耗控制在 30W 以下,较前代 Drive PX2 的 250W 功耗,已经有长足的进步。虽然以功耗表现来看,NVIDIA 可能不占优势,
但 Xavier 已经是目前市面上最成熟,且可用的 L4 级别自动驾驶方案,竞争厂商目前大多仅停留在 L2 级别的 ADAS 高级驾驶辅助系统,
所以目前车厂想发展 L4 级别以上的产品,要快速拿出可上路测试的方案,NVIDIA 可以说是唯一的选择。
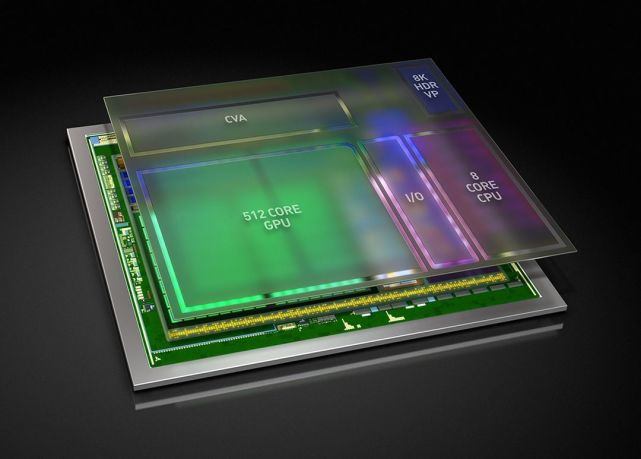
图丨 NVIDIA 的 Xavier
而其支持 L5 级别的完全自主驾驶方案 Pegasus 平台,虽然表面上高达 500W 的功耗数字吓到了不少业界人士,
但 DT 君认为,NVIDIA 推出此方案并非针对量产市场,而主要是针对先期开发之用,毕竟目前全世界关于自动驾驶法规的制订都还在相当初期的阶段,业界也认为在 2025 年之前,恐怕 L5 级别的自动驾驶汽车都还很难上路。
那既然未来数年自动驾驶的主流会是以 L3 为主,那支持 L4 级别以上的 Xavier 平台是否就没有推出意义?
但事实上,目前针对自动驾驶的周边传感元件的设计其实已经相当成熟,关键还是在法规、决策部分牵扯到的法律责任问题,以及对应自动驾驶的高分辨率地图数据的发展。也就是说,
以目前的硬件技术要设计出完整可上路的 L5 自动驾驶汽车并无太大的问题,关键在软件环境部分还有很大的升级空间。
换言之,车厂采用了基于 NVIDIA 的 Xavier 平台,可以推出在硬件功能上完全符合 L4 级别以上的汽车,但可根据不同时期法规,以及软件环境的成熟度,逐步升级软件,将其自动驾驶能力从 L3 提升到 L4 甚至 L5。

而由于车厂发展平台都希望能够有非常好的前后一致性,以及长期的平台支持能力,
一般汽车半导体方案的支持期间都至少是 5 年起跳,长则可达 10 年以上。虽然目前 NVIDIA 的方案价格较高,但如果能借其方案从 2018 年就设计出可供量产的 L4 级别以上自动驾驶汽车,未来车厂只需要在同一平台上去逐步升级、完整软件环境,以高端、可升级的汽车产品定位,不仅方案本身的高昂成本可以有效获得稀释,对车厂的市场布局以及长期的技术研发亦将会有正面的帮助。
而这也是 NVIDIA 打的如意算盘,
在各家方案厂商都还推不出 L3 级别自动驾驶方案的现在就已经抢先卡位 L5 市场,以汽车产业重视一致性、稳定性的习惯,未来中途要转换平台的可能性相当低,借此能确保 NVIDIA 在未来自动驾驶方案的市场与获利空间。当然,目前 NVIDIA 的 L5 方案在功耗方面的需求过大,要直接以该方案制造量产车虽非不可能,但是在车辆电源管理的需求恐怕难以解决,
但随着半导体工艺以及芯片设计技术的发展,这方面的问题应可获得很好的解决。
也因此,DT 君认为目前 NVIDIA 在自动驾驶解决方案上的硬件已经相对成熟,
CES 2018 上有关技术方案的消息可能不会太多,重点应在于其它周边或者是合作的进展。
Mobileye 将以 ADAS 市场优势并借助英特尔巩固自动驾驶方案地位
Mobileye 在 L3 级别以上的自动驾驶方案上消息还不多,毕竟其相关方案要到 2018 年才会面市,但其 ADAS,也就是 L2 级别以下的产品,可以说牢牢吸引住了绝大多数主流车厂的目光,目前市场上有超过 7 成的 ADAS 方案都是出自于 Mobileye 之手。

图丨 Mobileye EyeQ3
而就 Mobileye 目前在市场上贩售的 EyeQ3 方案来观察,虽然 Mobileye 将其定位为自动驾驶方案,且被特斯拉初代 Autopilot 系统采用,但实际上,其决策部分的性能偏弱,这可从架构上得见端倪:采用了 4 个 MIPS 在 2006 年就已经推出的 34K 核心,时脉仅约 500MHz,决策性能大约只能达到 Drive PX2 的百分之一左右,基本上只能勉强满足 L2 自动驾驶的需求,更高级别就需要新的 EyeQ4 方案才有办法支持。
但因为 Mobileye 过去长期耕耘 ADAS 市场,对相关视觉传感技术的配合相当成熟,若采用 Mobileye 的方案,基本上不用担心自动驾驶方面所需用到的视觉识别处理技术会有水土不服的现象,基本上多数方案都可和 Mobileye 配合,即便是即将推出的 EyeQ4,其重新搭配、验证的时间也可以降到最小。
另外一方面,未来数年纯 ADAS 汽车,也就是 L2 级别以下自动驾驶汽车依然会是市场绝对主流,L3 汽车定位将因相对高端而致使出货量难以与其相提并论。未来数年多数车厂的 L2 汽车都会持续采用 Mobileye 的 EyeQ3,主要就是因为其成本低廉,且已经被市场广为验证过,可靠性最高。
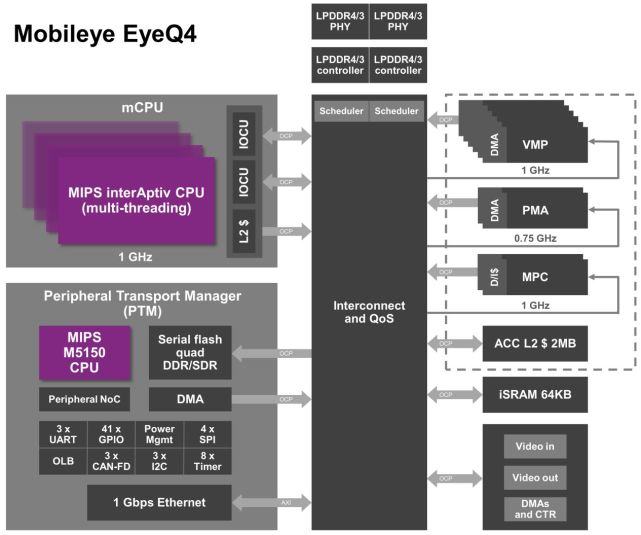
图丨 Mobileye EyeQ4 架构
当然,为确保 L3 级别以上的自动驾驶汽车市场,Mobileye 也将在 2018 年正式推出支持 L3 的 EyeQ4 方案,其基本架构与 EyeQ3 相当类似,都是以 MIPS 的 CPU 核心搭配矢量加速单元的组合,但架构上采用了更新更好的版本,整体计算效能也较 EyeQ4 增强了将近 10 倍,功耗仅微幅增加 0.5W。也就是说,
功耗仍是 EyeQ4 最强调、也是最明显的应用优势,但即便如此,整体计算能力仍远不如 NVIDIA 的方案。
虽然设计本身已经定案,芯片的计算能力没有太多改变的空间,但英特尔拥有基带、CPU 以及 FPGA 等计算与网络连接方案,未来可能通过外接的方案改善整体计算效率,也就是说,
EyeQ4 可能依靠英特尔的技术辅助,在不明显增加系统功耗的前提下,达到更高级别的自动驾驶支持能力,借以阻挠 NVIDIA 独霸 L3 级别以上市场的企图。
不过英特尔将会以何种方式协助 EyeQ4 拓展 L3 级别以上自动驾驶汽车市场,目前还不清楚,
而这据信也会成为英特尔在 CES 2018 中,关于自动驾驶市场策略布局最关键的信息。
高通瞄准车联网技术切入市场,同时亦搭配 NXP 的 BlueBox 平台打进自动驾驶市场
众所周知,高通在芯片联网能力方面一向占有业界领导地位,对于未来联网技术的发展也一直都最积极,虽然最近苦于客户关系的转变,以及专利收费的争议,导致公司未来的发展蒙上一层阴影,但高通本身技术上的优势仍在,且针对自动驾驶领域,来自所收购 NXP 的整套视觉识别技术有相当不错的积累,包含百度、一汽等车厂或驾驶方案公司也都有采用 NXP 的技术来设计相关方案。

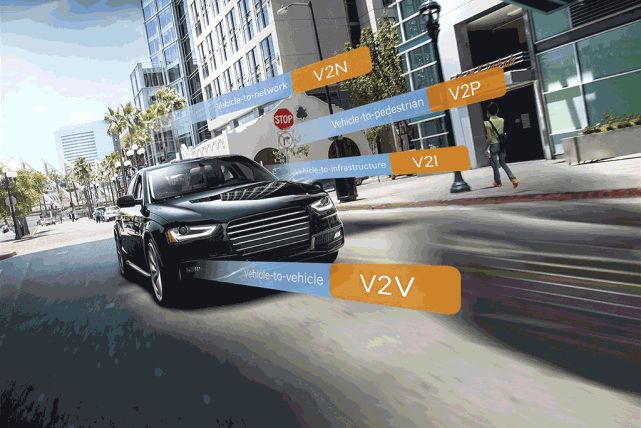
然而纯粹的自动驾驶方案并非目前高通所关心的项目,反而是在汽车联网能力方面,高通希望能够加快 V2V(车对车)、V2X(车对万物) 的进程,不论未来自动驾驶汽车采用什么方案,网络最好能够采用高通的技术。
高通方面认为,纯粹基于人工智能的自动驾驶方案在应用上有其限制,毕竟通过传感器来感知周遭环境的变化,只能针对小范围的环境来进行决策,而无法改善整个交通网络效率。
只讲求汽车本身的自动驾驶只能算是半套,没有办法从根本改善整体交通运输所面临的瓶颈。
另外,汽车本身的自动驾驶软件是通过人的逻辑去撰写,因此人会犯的错,自动驾驶也有可能犯下类似的错,且视觉处理方面目前还是以人所设计的标线、信号为识别对象,这些原本就都不是针对机器识别优化,其实对自动驾驶系统都是相当沉重的计算负担。
因此,若从基础建设着手,直接从网络更新与地理位置配合的道路、信号状况,车辆的驾驶系统同时考量来自云端的信息汇总整理,以及汽车本身所收集的近距离传感器数据,借以让自动驾驶车辆进行最好的路线选择以及更长线路的驾驶决策判断,将更能优化整体驾驶效率,也比单纯依赖汽车本身的智能驾驶逻辑更为合理。
当然,要达到高通理想中的自动驾驶车联网环境,基础设施必须达到相当完备的程度,其行车信息的统整也才有意义,而在 L3 之前的自动驾驶级别,基本上也没有使用 V2X 的必要。
既然车联网的基础设施短时间之内无法普及,来自 NXP 的自动驾驶方案看来也还没有实际成效,那高通在自动驾驶领域就不用玩了?
高通向来就比较重视长线布局,虽然各驾驶方案大厂都集中精力推出本地端智能驾驶软硬件方案,高通看来稍微有点落后,但这些方案未来百分之百都会需要联网,而联网方案选择方面,目前来看英特尔、联发科、展讯、高通都是可选方案,英特尔应会以搭配自家方案为主,联发科、展讯则是技术相对落后,而华为、苹果虽亦可能发展相关方案,但同样以自用为主,那么最成熟的联网方案自然非高通莫属了。
当然,高通同样也会强化来自 NXP 的 BlueBox 的生态,且通过 Snapdragon 平台的人工智能处理能力强化决策性能表现,并强调其以车联网为核心,统合云端与终端的大数据计算能力,形成具备竞争优势的方案,
不是只做汽车本身的智能,而是让整个城市的交通变得智能化,相信这才是高通面对未来自动驾驶的技术发展趋势、心里真正的盘算。