基于STM32的无线通信模块使用——HC_05蓝牙串口
注:以下某些资料来自于该模块淘宝店里有介绍,规格书没找到啊。
- 模块介绍
- PC端配置模块,手机端连接模块
- STM32串口配置模块
- 串口通信
- 小结
一、模块介绍
1、供电电压3.3V~3.6V;
2、支持AT指令集配置模块;
3、采用CSR主流蓝牙芯片,蓝牙V2.0协议标准;
4、波特率最高为1382400bps;
5、配对以后当全双工串口使用,无需了解任何蓝牙协议,但仅支持8位数据位、1位停止位、无奇偶校验的通信格式,这也是最常用的通信格式,不支持其他格式。
6、接口电平3.3V,可以直接连接各种单片机(51,AVR,PIC,ARM,MSP430等),5V单片机最好串联一个1K电阻再与模块直接连接,无需MAX232也不能经过MAX232!
二、PC端配置模块,手机端连接模块
如果要配置模块的参数,那么就必须要进入AT命令模式,我们首先通过PC机来配置一个模块。
1、进入AT模式设置
1.1、通过一条USB转串口线与模块相连,注意是要交叉连接。
1.2、在PC端上使用串口调试助手设置正确的波特率、校验位、停止位。AT模式下波特率固定为38400bps。这个波特率是不能更改的。
1.3、进入AT模式有如下两种方法:
1:在模块上电之前(也可以同时),把KEY脚设置为高电平(或接VCC),然后再对模块上电。此时LED慢闪(2S一次),模块进入AT状态,波特率固定为38400.
2:在模块上电的时候,把KEY脚设置为低电平(或接GND),此时LED快闪(1S两次),然后再把KEY脚设置为高电平(或接VCC),模块也会进入AT指令,但是LED依旧快闪,此时波特率为默认波特率9600.
按照上述的方法,进入AT模式后,此时led由原先的快闪变成2s闪一次,在串口调试助手中输入”AT”,如果响应”OK”,说明进入AT命令模式成功,此后就可以测试其他的命令了。注意,AT指令集最后面都要跟着发送 \r\n也就是回车换行符,这样模块才认这个指令
2、模块的配置为从机
从机只能用来被搜索,不能主动搜索其他设备。
因为前期是要熟悉模块的配置以及使用,所以先配置为从机供其他设备(PC机、手机)搜索连接。在PC机上的串口调试助手中依次输入如下AT指令进行配置。
-> 首先回复初始化设置 AT+ORGL

-> 设置从机名字 AT+NAME=SLAVE

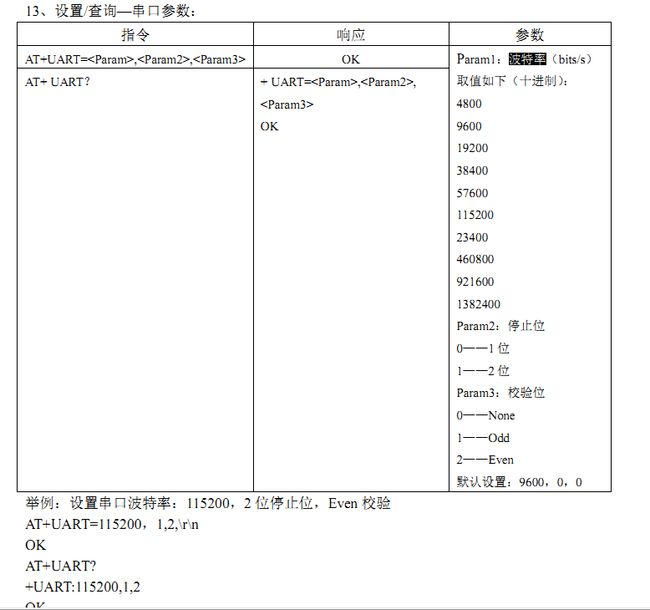
-> 设置波特率 AT+UART=115200,1,2
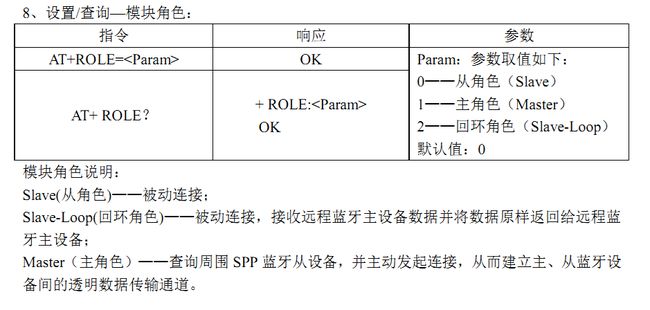
-> 设置为从机角色 AT+ROLE=0
-> 重启设备 AT+RESET

当重启设备成功后,此时模块会自动进入正常工作模式(还未被连接或连接上)led快闪。
3、通过手机蓝牙连接模块
按照上面的步骤配置完成后,无论是通过手机或者是PC机都可以进行配对连接。手机的话可以安装”蓝牙串口助手”与模块进行配对连接,这样两者之间就可以与模块进行通信了。当两者连接成功后,模块进入透传模式,此时led等2闪1停。
三、STM32串口配置模块
若未进行初始化操作,该模块只需配置一次即可使用。在使用的时候,我们可以通过PC来配置模块,当然也可以通过软件来配置模块。两者实际上是一样的,都是通过串口往模块写入AT指令。在PC端我们通过串口调试助手写入一个AT指令,模块就会响应相应的内容显示在串口调试助手上,我们也就能判断刚刚写入的指令是否OK。但是,通过stm32的串口配置模块有一点需要注意的,那就是要准确的识别模块的响应操作的内容。
1、写入指令
// 往串口中写入指定大小的数据
int16_t WriteATCmd(USART_TypeDef* USARTx, char *cmd, uint16_t size)
{
uint16_t i = 0;
if(cmd != NULL)
{
for(i=0; i<size; i++)
{
USART_TrasmitData(USARTx, cmd[i]);
}
// 注意最后要写入 \r\n
USART_TrasmitData(USARTx, 0x0d);
USART_TrasmitData(USARTx, 0x0a);
return 0;
}
else
{
printf("cmd is NULL\n");
return -1;
}
}// 设置模块名称
int16_t HC_05_ATName(char *name)
{
uint16_t cmd_size = 0;
uint16_t name_size = 0;
int16_t ret = 0;
int16_t res_size = 0;
// 存放模块响应字符串的数组,这个数 组的长度可以根据AT指令集文档中响应的字符串长度做调整
char respon[10] = {0};
char AT_NAME_CMD[20] = "AT+NAME=";
name_size = strlen(name);
cmd_size = strlen(AT_NAME_CMD);
// 当name的长度过大,只取20-cmd_size个字符
if((name_size+cmd_size) > 20)
strncat(AT_NAME_CMD, name, 20-cmd_size);
else
strcat(AT_NAME_CMD, name);
cmd_size = strlen(AT_NAME_CMD);
// 通过STM32的USART1往串口写入数据AT_NAME_CMD,共写入cmd_size大小
ret = WriteATCmd(USART1, AT_NAME_CMD, cmd_size);
if(ret == 0)
{
printf("Write AT_NAME_CMD OK\n");
}
else
{
printf("Write AT_NAME_CMD ERROR\n");
}
res_size = ReadResponse(USART2, respon);
ret = isResponseOK(res_size, respon);
return ret;
}2、读取模块的响应数据
当写入AT指令正确后,模块就会响应一个相应的字符串给我们,从HC-05 AT指令集的文档中我们看到,无论写入哪种AT指令,如果正确,最终都会反馈一个”OK”的字符串,我们可以通过这个字符串来判断写入的指令是否响应正确。
int16_t ReadResponse(USART_TypeDef* USARTx, char *Str)
{
uint16_t data = 0;
uint16_t Status = 0;
uint16_t pos = 0;
int16_t size = 0;
while(1)
{
// 每次从串口读取一个字符前都要启动定时器
TIM2_Config_Init(1000);
TIM_Cmd(TIM2, ENABLE);
while(USART_GetFlagStatus(USARTx, USART_FLAG_RXNE) == RESET)
{
// 表示已读取到末尾
if(Status == 1)
{
size = strlen(Str);
TIM_Cmd(TIM2, DISABLE);
break;
}
// 表示已经超时,此时不再等待从串口中读取数据
if(TimeoutFlag == 1)
{
break;
}
}
if(TimeoutFlag != 1) // 未超时
{
if(Status != 1) // 读取未结束
{
data = USART_ReceiveData(USARTx); // 从串口中读取数据
// 只有存放非 \r和 \n的字符
if((data != '\r') && (data != '\n'))
{
Str[pos++] = data;
if(pos > 1)
{
// 判断倒数第四和第三个字符是否是"OK",若是则表明已读取到末尾(注:倒数第一和第二个字符是\r\n,已被过滤掉)
if((Str[pos-2] == 'O') && (Str[pos-1] == 'K'))
{
Str[pos] = '\0'; // 为了便于计算,在获取的字符串中加入字符结束标志
Status = 1;
}
}
}
}
else
{
break;
}
}
else
{
TimeoutFlag = 0;
size = -1;
printf("Read AT_Cmd response timeout\n");
break;
}
}
return size;
}在读取模块的响应数据中加入了超时机制,当一定的时间到达后如果没有接收到串口的数据,我们就认为AT模块不响应我们的操作,此时认为写AT指令错误。若响应数据中包含”OK”字符串,我们就认为AT指令成功。
四、串口通信
当主从模块都配置成功后,接下来的事情就简单了。你就把操作模块之间的数据发送接收当做串口直接的读写数据。
五、小结
HC-05这个模块用起来非常的便捷,不要求熟悉蓝牙协议什么的。只要你懂得用串口就知道这个模块怎么用。