【STM32】STM32之timer3产生PWM
本篇博文最后修改时间:2017年01月14日,23:50。
一、简介
本文介绍STM32系列如何使用timer3的第3通道(PB0)产生38K频率的PWM。
二、实验平台
库版本:STM32F10x_StdPeriph_Lib_V3.5.0
编译软件:MDK4.53
硬件平台:STM32开发板(主芯片stm32f103c8t6)
仿真器:JLINK
三、版权声明
博主:甜甜的大香瓜
声明:喝水不忘挖井人,转载请注明出处。
原文地址:http://blog.csdn.NET/feilusia
联系方式:[email protected]
香瓜BLE之CC2541群:127442605
香瓜BLE之CC2640群:557278427
香瓜BLE之Android群:541462902
香瓜单片机之STM8/STM32群:164311667
甜甜的大香瓜的小店(淘宝店):https://shop217632629.taobao.com/?spm=2013.1.1000126.d21.hd2o8i
四、
实验前提
1、在进行本文步骤前,请先
阅读
以下博文:
暂
无
2、在进行本文步骤前,请先
实现以下博文:
暂无
五、基础知识
暂无六、实验步骤
1、编写并添加PWM驱动
1)编写驱动GUA_Timer3_PWM.c(存放在“……\HARDWARE”)
//******************************************************************************
//name: GUA_Timer3_PWM.c
//introduce: 定时器3的PWM驱动
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.01.14
//******************************************************************************
#include "stm32f10x.h"
#include "GUA_Timer3_PWM.h"
/*********************宏定义************************/
//引脚宏
#define GUA_TIMER3_PWM_PORT GPIOB
#define GUA_TIMER3_PWM_PIN GPIO_Pin_0
#define GUA_TIMER3_PWM_MODE GPIO_Mode_AF_PP
#define GUA_TIMER3_PWM_GPIO_CLOCK RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO
#define GUA_TIMER3_PWM_PERIPH_CLOCK RCC_APB1Periph_TIM3
//计数值
#define GUA_TIMER3_PWM_PERIOD (72 - 1)
/*********************内部函数声明************************/
static void GUA_Timer3_PWM_IO_Init(void);
static void GUA_Timer3_PWM_Config_Init(GUA_U16 nGUA_Timer3_PWM_Prescaler);
//******************************************************************************
//name: GUA_Timer3_PWM_IO_Init
//introduce: 定时器3的PWM的IO初始化
//parameter: none
//return: none
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.01.14
//******************************************************************************
static void GUA_Timer3_PWM_IO_Init(void)
{
//IO结构体
GPIO_InitTypeDef GPIO_InitStructure;
//时钟配置
RCC_APB2PeriphClockCmd(GUA_TIMER3_PWM_GPIO_CLOCK, ENABLE);
//IO初始化
GPIO_InitStructure.GPIO_Pin = GUA_TIMER3_PWM_PIN;
GPIO_InitStructure.GPIO_Mode = GUA_TIMER3_PWM_MODE;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GUA_TIMER3_PWM_PORT, &GPIO_InitStructure);
}
//******************************************************************************
//name: GUA_Timer3_PWM_Config_Init
//introduce: 定时器3的PWM的配置初始化
//parameter: nGUA_Timer3_PWM_Prescaler:预分频数值,如100则表示1000000/100=10000Hz
//return: none
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.01.14
//******************************************************************************
static void GUA_Timer3_PWM_Config_Init(GUA_U16 nGUA_Timer3_PWM_Prescaler)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//时钟配置
RCC_APB1PeriphClockCmd(GUA_TIMER3_PWM_PERIPH_CLOCK, ENABLE);
//定时器配置
TIM_TimeBaseStructure.TIM_Period = GUA_TIMER3_PWM_PERIOD; //设置计数值
TIM_TimeBaseStructure.TIM_Prescaler = nGUA_Timer3_PWM_Prescaler - 1; //设置预分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分频系数:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数溢出模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
//PWM配置
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //配置为PWM模式1(小于计数值时为有效电平)
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //有效电平为低电平
TIM_OC3Init(TIM3, &TIM_OCInitStructure); //使能通道3
//默认关闭PWM
GUA_Timer3_PWM_Status(GUA_TIMER3_PWM_STATUS_OFF);
//使能
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable); //CH3预装载使能
TIM_ARRPreloadConfig(TIM3, ENABLE); //使能TIM3重载寄存器ARR
TIM_Cmd(TIM3, ENABLE); //使能定时器3
}
//******************************************************************************
//name: GUA_Timer3_PWM_Status
//introduce: 定时器3的PWM开关
//parameter: nGUA_Timer3_PWM_Status: GUA_TIMER3_PWM_STATUS_ON or GUA_TIMER3_PWM_STATUS_OFF
//return: none
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.01.14
//******************************************************************************
void GUA_Timer3_PWM_Status(GUA_U8 nGUA_Timer3_PWM_Status)
{
//打开PWM
if(nGUA_Timer3_PWM_Status == GUA_TIMER3_PWM_STATUS_ON)
{
TIM_SetCounter(TIM3, 0);
TIM_CCxCmd(TIM3, TIM_Channel_3, TIM_CCx_Enable);
}
//关闭PWM
else
{
TIM_CCxCmd(TIM3, TIM_Channel_3, TIM_CCx_Disable);
}
}
//******************************************************************************
//name: GUA_Timer3_PWM_SetDutyCycle
//introduce: 定时器3的PWM设置占空比
//parameter: nGUA_Timer3_PWM_DutyCycle: 0~100为0%~100%
//return: none
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.01.14
//******************************************************************************
void GUA_Timer3_PWM_SetDutyCycle(GUA_U8 nGUA_Timer3_PWM_DutyCycle)
{
TIM_SetCompare3(TIM3, GUA_TIMER3_PWM_PERIOD*nGUA_Timer3_PWM_DutyCycle/100);
}
//******************************************************************************
//name: GUA_Timer3_PWM_Init
//introduce: 定时器3的PWM初始化
//parameter: nGUA_Timer3_PWM_Prescaler:预分频数值,如100则表示1000000/100=10000Hz
//return: none
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.01.14
//******************************************************************************
void GUA_Timer3_PWM_Init(GUA_U16 nGUA_Timer3_PWM_Prescaler)
{
//初始化IO
GUA_Timer3_PWM_IO_Init();
//初始化定时器配置
GUA_Timer3_PWM_Config_Init(nGUA_Timer3_PWM_Prescaler);
}
2)编写驱动头文件GUA_Timer3_PWM.h(存放在“……\HARDWARE”)
//******************************************************************************
//name: GUA_Timer3_PWM.h
//introduce: 定时器3的PWM驱动的头文件
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜单片机之STM8/STM32(164311667)
//changetime: 2017.01.14
//******************************************************************************
#ifndef _GUA_TIMER3_PWM_H_
#define _GUA_TIMER3_PWM_H_
/*********************宏定义************************/
//类型宏
#ifndef GUA_U8
typedef unsigned char GUA_U8;
#endif
#ifndef GUA_8
typedef signed char GUA_8;
#endif
#ifndef GUA_U16
typedef unsigned short GUA_U16;
#endif
#ifndef GUA_16
typedef signed short GUA_16;
#endif
#ifndef GUA_U32
typedef unsigned long GUA_U32;
#endif
#ifndef GUA_32
typedef signed long GUA_32;
#endif
#ifndef GUA_U64
typedef unsigned long long GUA_U64;
#endif
#ifndef GUA_64
typedef signed long long GUA_64;
#endif
//PWM的开关宏
#define GUA_TIMER3_PWM_STATUS_ON 0 //PWM打开
#define GUA_TIMER3_PWM_STATUS_OFF 1 //PWM关闭
/*********************外部函数声明************************/
void GUA_Timer3_PWM_Status(GUA_U8 nGUA_Timer3_PWM_Status);
void GUA_Timer3_PWM_SetDutyCycle(GUA_U8 nGUA_Timer3_PWM_DutyCycle);
void GUA_Timer3_PWM_Init(GUA_U16 nGUA_Timer3_PWM_Prescaler);
#endif
3) 工程中添加GUA_Timer3_PWM.c

4)在MDK设置中添加驱动源文件路径

2、添加库的驱动
1)添加库的驱动文件
2)添加库的驱动头文件(stm32f10x_conf.h 中)
#include "stm32f10x_tim.h"3、在应用层中调用
1)添加驱动头文件(main.c中)
#include "GUA_Timer3_PWM.h"2) 添加测试代码(main.c的main函数中)
GUA_Timer3_PWM_Init(26); //设置PWM频率为1000000/26=38000Hz=38KHz
GUA_Timer3_PWM_SetDutyCycle(50); //设置PWM占空比为50%
GUA_Timer3_PWM_Status(GUA_TIMER3_PWM_STATUS_ON); //使能PWM
GUA_Timer3_PWM_SetDutyCycle(30); //设置PWM占空比为30%
GUA_Timer3_PWM_SetDutyCycle(60); //设置PWM占空比为60%
GUA_Timer3_PWM_SetDutyCycle(0); //设置PWM占空比为0%
GUA_Timer3_PWM_SetDutyCycle(100); //设置PWM占空比为100%
GUA_Timer3_PWM_Status(GUA_TIMER3_PWM_STATUS_OFF); //停止PWM
GUA_Timer3_PWM_SetDutyCycle(50); //设置PWM占空比为50%
GUA_Timer3_PWM_Status(GUA_TIMER3_PWM_STATUS_ON); //使能PWM
七、注意事项
1、在初始化PWM的配置之后,需要调用使能PWM的函数才会有PWM的波形。
2、PWM会有死区。
八、实验结果
设置仿真断点在测试代码,仿真并全速运行至断点,单步执行测试代码后的PB0波形如下图:
1、使能PWM
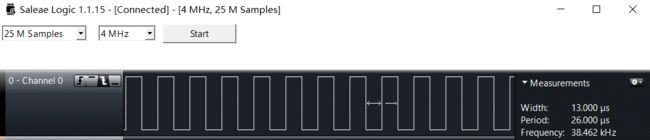
初始化时设置了26us的周期,启动PWM前设置了50%的占空比。因此使能PWM之后直接输出了波形。
低电平13us、高电平13us、一个周期26us,因此占空比为13/26=50%。
2、设置30%占空比

低电平7.75us、高电平18.25us、一个周期26us,因此占空比为7.75/26=29.8%。
3、设置60%占空比

低电平15.75us、高电平10.25us、一个周期26us,因此占空比为15.75/26=60.6%。
4、设置0%占空比

0%时一直为高电平。
5、设置100%占空比


100%时可见低电平有许多0.25us的毛刺脉冲,这是PWM的死区。
0~100%的占空比中一定会有一个死区,解决死区脉冲的方法:在死区时配置为IO置位为相应的电平。
PS:香瓜在本PWM驱动中没有解决此问题,因为项目中只使用到50%的占空比。
6、关闭PWM

关闭PWM后,在代码中有设置为IO拉高,因此抓到的波形为高电平。
7、设置50%占空比+使能PWM

再次使能PWM之前,先配置了50%的占空比。
低电平13us、高电平13us、一个周期26us,因此占空比为13/26=50%。
因此,实验成功。