STM32控制BLDC-如何让电机转起来
无刷直流电机比较流行,很多电机内部加入霍尔元件,通过霍尔元件可以知道电机转子的位置,根据这个位置给电机相线供电,这样电机就转起来了。框图如下所示
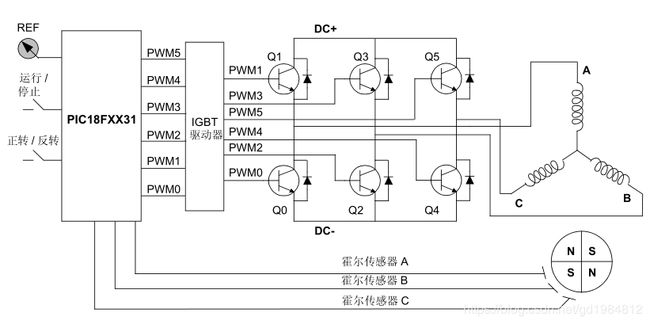
霍尔元件输出与相线输入电压的关系可以让BLDC电机厂家提供,一般都提供这个对应关系表,如下图所示
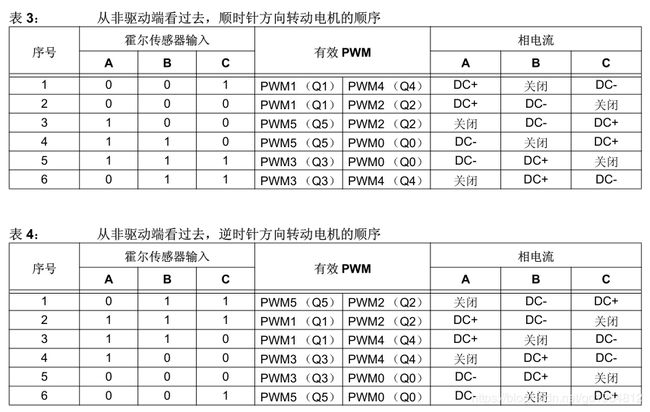
有了上面这些足可以让我们设计电路编写程序让电机转起来!
有上面的框图可以看出,3相电机的驱动需要六个mos管,一般用的是NMOS,大功率的NMOS比较便宜。大功率MOS管有较大的结电容,控制电压也高些,无法用单片机直接驱动,所以需要驱动电路。驱动芯片组成的驱动电路比较简单,常见的有IR2110S,我这里用IR2110S设计了MOS驱动电路,如下图所示,其中C24和D5是自举电路,为了控制Q3抬高电压。

3片IR2110S驱动6个NMOS,如下图

霍尔元件供电是5V,他的输出一般也是5V,可以分压后给单片机用。

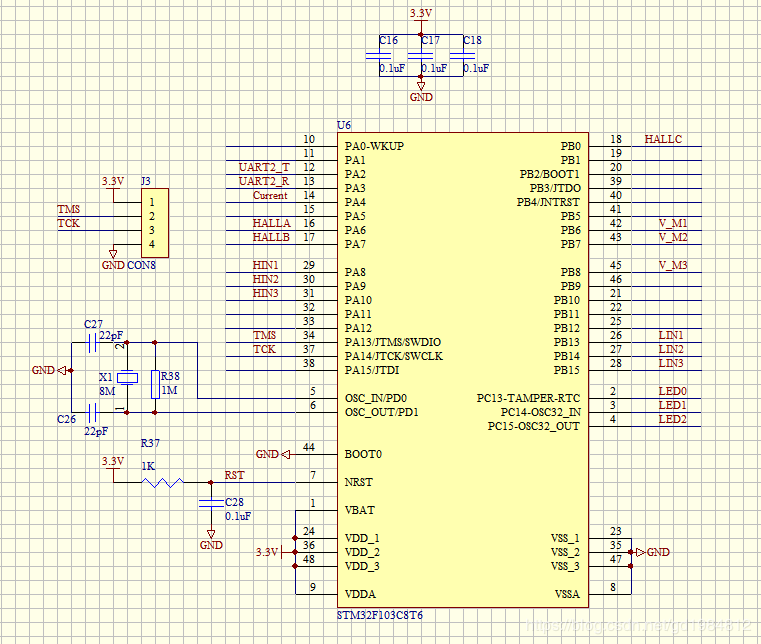
单片机用流行STM32,他有高级定时器T1,T8,可以输出3对互补的PWM波,还有刹车信号输入,这些特性对于电机的可控制非常合适。电路如下图所示
BLDC电机控制用到单片机定时器及IO中断,初始化部分如下
void TIM_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_BDTRInitTypeDef TIM_BDTRInitStructure;
EXTI_InitTypeDef EXTI_InitStructure;//
NVIC_InitTypeDef NVIC_InitStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
// ¿ªÆô¶¨Ê±Æ÷ʱÖÓ,¼´ÄÚ²¿Ê±ÖÓCK_INT=72M
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_TIM1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
// Êä³ö±È½ÏͨµÀ1 GPIO ³õʼ»¯
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//»ô¶ûÊäÈë
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource0);
EXTI_InitStructure.EXTI_Line=EXTI_Line0;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource6);
EXTI_InitStructure.EXTI_Line= EXTI_Line6;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource7);
EXTI_InitStructure.EXTI_Line= EXTI_Line7;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x03;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_DeInit(TIM1); //½«ÍâÉèTIM1¼Ä´æÆ÷ÖØÉèΪȱʡֵ
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1 ;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up ;
TIM_TimeBaseInitStruct.TIM_Period = 1000 ;
TIM_TimeBaseInitStruct.TIM_Prescaler = 3 ;
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStruct ) ;
/* ¶¨Ê±Æ÷Êä³öͨµÀ1ģʽÅäÖà */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_Pulse = 1000;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCNPolarity= TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Set;
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
TIM_OC2Init(TIM1, &TIM_OCInitStructure);
TIM_OC3Init(TIM1, &TIM_OCInitStructure);
/* Automatic Output enable, Break, dead time and lock configuration*/
TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable;
TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable;
TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_OFF;
TIM_BDTRInitStructure.TIM_DeadTime = 1;
TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable;
TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High;
TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable;
TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure);
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable);
TIM_OC2PreloadConfig(TIM1,TIM_OCPreload_Enable);
TIM_OC3PreloadConfig(TIM1,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1, ENABLE);
TIM_Cmd(TIM1, ENABLE);
TIM_CtrlPWMOutputs(TIM1, ENABLE);
TIM_CCxCmd(TIM1,TIM_Channel_1,TIM_CCx_Enable);
TIM_CCxNCmd(TIM1,TIM_Channel_1,TIM_CCxN_Enable);
TIM_CCxCmd(TIM1,TIM_Channel_2,TIM_CCx_Enable);
TIM_CCxNCmd(TIM1,TIM_Channel_2,TIM_CCxN_Enable);
TIM_CCxCmd(TIM1,TIM_Channel_3,TIM_CCx_Enable);
TIM_CCxNCmd(TIM1,TIM_Channel_3,TIM_CCxN_Enable);
}让电机转起来需要知道电机转子的位置,根据霍尔相位对应表驱动电机相线,程序里用中断获取霍尔电平的变化。
void EXTI0_IRQHandler(void)
{
int i,j;
if(EXTI_GetITStatus(EXTI_Line0)!=RESET)
{
EXTI_ClearITPendingBit(EXTI_Line0);
step=((GPIOA->IDR & GPIO_Pin_6)>>6)+((GPIOA->IDR & GPIO_Pin_7)>>6)+((GPIOB->IDR & GPIO_Pin_0)<<2);
if(start==1)
{
TIM1->CCER=PHASE_CHANGE[step];
int_count1++;
}
}
}
void EXTI9_5_IRQHandler(void)
{
int i,j;
if(EXTI_GetITStatus(EXTI_Line6)!=RESET)
{
EXTI_ClearITPendingBit(EXTI_Line6);
step=((GPIOA->IDR & GPIO_Pin_6)>>6)+((GPIOA->IDR & GPIO_Pin_7)>>6)+((GPIOB->IDR & GPIO_Pin_0)<<2);
if(start==1)
{
TIM1->CCER=PHASE_CHANGE[step];
int_count2++;
}
}
if(EXTI_GetITStatus(EXTI_Line7)!=RESET)
{
EXTI_ClearITPendingBit(EXTI_Line7);
step=((GPIOA->IDR & GPIO_Pin_6)>>6)+((GPIOA->IDR & GPIO_Pin_7)>>6)+((GPIOB->IDR & GPIO_Pin_0)<<2);
if(start==1)
{
TIM1->CCER=PHASE_CHANGE[step];
int_count3++;
}
}
}
检测到变化后改变定时器输出,从而使电机相线得到驱动,我在程序里做好了数组,把得到了位置通过数组给定时器CCER寄存器,这样电机就转起来了
int PHASE_CHANGE[7]={0x0000,0x0104,0x0041,0x0140,0x0410,0x0014,0x0401};这是霍尔输出与PWM输出波形的截图

这是定时器3对PWM的输出截图

这是电机和电路板
