SLAM三角测量程序理解【随笔更】
函数 triangulation
void triangulation (
const vector< KeyPoint >& keypoint_1,
const vector< KeyPoint >& keypoint_2,
const std::vector< DMatch >& matches,
const Mat& R, const Mat& t,
vector< Point3d >& points )
{
Mat T1 = (Mat_ (3,4) <<
1,0,0,0,
0,1,0,0,
0,0,1,0);
Mat T2 = (Mat_ (3,4) <<
R.at(0,0), R.at(0,1), R.at(0,2), t.at(0,0),
R.at(1,0), R.at(1,1), R.at(1,2), t.at(1,0),
R.at(2,0), R.at(2,1), R.at(2,2), t.at(2,0)
);
Mat K = ( Mat_ ( 3,3 ) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1 );
vector pts_1, pts_2;
for ( DMatch m:matches )
{
// 将像素坐标转换至相机坐标
pts_1.push_back ( pixel2cam( keypoint_1[m.queryIdx].pt, K) );
pts_2.push_back ( pixel2cam( keypoint_2[m.trainIdx].pt, K) );
}
Mat pts_4d;
cv::triangulatePoints( T1, T2, pts_1, pts_2, pts_4d );
// 转换成非齐次坐标
for ( int i=0; i(3,0); // 归一化
Point3d p (
x.at(0,0),
x.at(1,0),
x.at(2,0)
);
points.push_back( p );
}
}
1.1
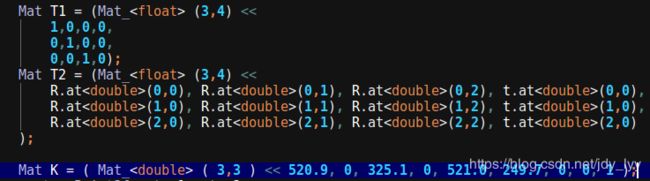
T1标定为原点,T2变成R T 结合的变换坐标,K为相机内参
1.2 像素坐标(2维)转化为相机坐标(3维)

用到了下面内部函数
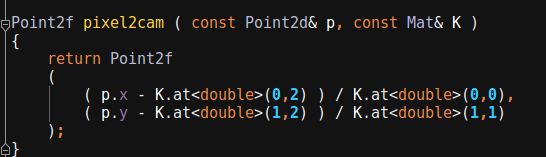
转化方法如下图
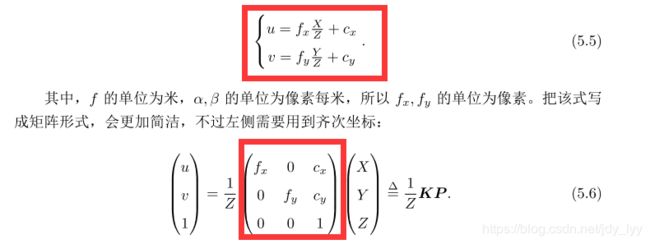
u v :像素坐标元素
X Y Z : 相机坐标元素
通过图片式 5.5 写出的函数 Point2f pixel2cam ( const Point2d& p, const Mat& K )
1.3 triangulatePoints 输出3D坐标
Mat pts_4d;
cv::triangulatePoints( T1, T2, pts_1, pts_2, pts_4d );
// 转换成非齐次坐标
for ( int i=0; i(3,0); // 归一化
Point3d p (
x.at(0,0),
x.at(1,0),
x.at(2,0)
);
points.push_back( p );
}

参考链接
https://www.jianshu.com/p/96d3b832330e
课本
视觉SLAM14讲