#物联网#一个小型的物联网系统——智能窗帘控制系统
介绍
涉及模块:
1.LCD1602液晶屏
2.DS18B20温度传感器
3.ADC0832数模转换芯片
4.TORCH_LDR光照度控件
5.步进电机
实现功能:
1.在LCD上显示实时温度与窗帘状态。
2.温度在15~25℃范围内开窗帘,范围外关窗帘。
3.光线强时关窗帘,光线弱时开窗帘。
4.可通过按钮手动开关窗帘。
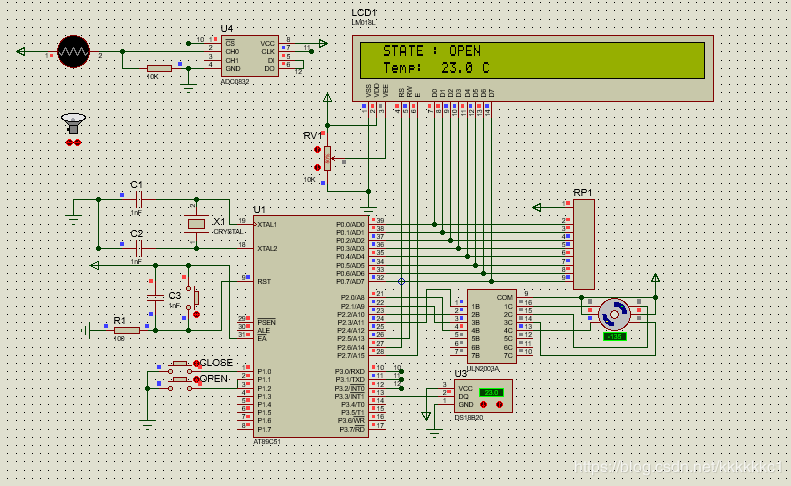
仿真图
窗帘系统Proteus仿真图:
代码
项目由以下6个文件组成 :
- main.c
- define.h
- delay.h
- DS18B20.h
- LCD1602.h
- ADC0832.h
main.c
#include define.h
#ifndef _DEFINE_H_
#define _DEFINE_H_
#define uchar unsigned char
#define uint unsigned int
sbit RS=P2^6;
sbit RW=P2^5;
sbit EN=P2^7;
sbit DQ=P3^3;
sbit CLK=P3^1;
sbit CS=P3^0;
sbit DO=P3^2;
bit DS_OK=1;
sbit key1 = P1^0; //开关开窗帘
sbit key2 = P1^1; //开关关窗帘
uchar code Run[]={
0x00,0x01,0x03,0x02,0x06,0x04,0x0C,0x08,0x09,0xff};
uchar RunSpeed = 60;
uchar status=0;
uchar i=0;
uchar Temp_AD=0;//现在的光照强度
uchar Standard='F';//光照强弱临界值
bit flag=1; //手动模式/自动模式的标志
uchar CurtainStatu[]={" STATE : "};
uchar buffer_line2[]={" Temp: C "};
uchar code df_tab[]={0,1,1,2,3,3,4,4,5,6,6,7,8,8,9,9};
uchar current=0;
uchar display_digit[]={0,0,0,0};
uchar temp_value[]={0x00,0x00};
uchar back_temp_value[]={0x00,0x00};
char alarm_HL[]={70,-10};
char sign_temp;
bit LO_alarm=0;
bit HI_alarm=0;
#endif
delay.h
#ifndef _DELAY_H_
#define _DELAY_H_
void delay(uint z)
{
uint x;
while(z--)
for(x=50;x>0;x--);
}
void delay0(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=0;y<10;y++);
}
void delay1(uint y)
{
uint x;
while(y--)
for(x=4500;x>0;x--);
}
void delayms(uchar x)
{
int i,j;
for(i=x;i>0;i--)
for(j=0;j<120;j++);
}
void delay_us()
{_nop_();_nop_();
_nop_();_nop_();}
void delay_1us(uint x) //延时
{
while(--x);
}
#endif
DS18B20.h
#ifndef _DS18B20_H_
#define _DS18B20_H_
#include "define.h"
#include "DELAY.H"
#include "LCD1602.h"
#include LCD1602.h
#ifndef _LCD1602_H_
#define _LCD1602_H_
uchar LCD_check_busy()
{
uchar state;
RS=0;
RW=1;
delay(2);
EN=1;
state=P0;
delay(2);
EN=0;
delay(2);
return state;
}
void LCD_write_cmd(uchar cmd)
{
while((LCD_check_busy()&0x80)==0x80);
RS=0;
RW=0;
delay(2);
EN=1;
P0=cmd;
delay(2);
EN=0;
delay(2);
}
void LCD_write_data(uchar dat)
{
while((LCD_check_busy()&0x80)==0x80);
RS=1;
RW=0;
delay(2);
EN=1;
P0=dat;
delay(2);
EN=0;
delay(2);
}
void LCD_display(uchar position,uchar *s)
{
uchar i;
LCD_write_cmd(0x80+position);
for(i=0;i<16;i++)
{
LCD_write_data(s[i]);
}
}
void LCD_init()
{
LCD_write_cmd(0x38);
LCD_write_cmd(0x0c);
LCD_write_cmd(0x06);
LCD_write_cmd(0x01);
}
#endif
ADC0832.h
#ifndef _ADC0832_H_
#define _ADC0832_H_
uchar ADC0832()
{
uchar i,temp;
CLK=0;
CS=0;//选中AD芯片
delay0(1);
DO=1;//发送bit1 说明开始转换
CLK=1;//一个上升沿 将开始位输出ADC0832
delay0(1);
CLK=0;
DO=1;
delay0(1);
CLK=1;
delay0(1);
CLK=0;
DO=0;
delay0(1);
CLK=1;
delay0(1);
CLK=0;
DO=1;
for(i=8;i>0;i--)
{
CLK = 1;
delay(1);
CLK=0;
delay(1);
temp|=DO;
if(DO)
temp++;
temp<<1;
}
CS=1;//释放芯片
return temp;//返回读回来的数值
}
void LightIntensity(unsigned char num1)
{
//ad在光度强的时候采集回来的电压是小的数值
//为了方便显示用255将其取反,为光度越强的时候数值越大
//保留实际ad的数值 比如ad50的时候对应80
//转换为更100有关的高度
num1=num1/2.55;
Temp_AD=100-num1;
}
末尾献上可运行资源,需要自取
![]()
![]()
![]()
戳这里