第六十八篇:从ADAS到自动驾驶(一):自动驾驶发展及分级
作者:liaojiacai
从ADAS到自动驾驶(一):自动驾驶的发展及分级
从今天起,我将根据自己所接触的ADAS和无人驾驶技术,来写一写无人驾驶的基本知识,主要是帮助自己总结,还有是自己做了一些工作,这里就当做是用来保存的笔记。本人还在读研,所以有些知识还不足,希望大家多多指点,共同进步!!!
我将会按照下面的文章顺序来写,当然中途可能会有变化:
从ADAS到自动驾驶(一):自动驾驶的发展及分级
从ADAS到自动驾驶(二):ADAS的功能及发展
从ADAS到自动驾驶(三):车道检测
从ADAS到自动驾驶(四):车辆检测
从ADAS到自动驾驶(五):行人检测
从ADAS到自动驾驶(六):可行驶区域检测
从ADAS到自动驾驶(七):路标检测
从ADAS到自动驾驶(八):交通灯检测
从ADAS到自动驾驶(九):智能网联汽车
从ADAS到自动驾驶(十):自动驾驶控制决策
一、自动驾驶的发展
从20世纪70年代开始,美国、英国、德国等发达国家开始进行无人驾驶汽车的研究,在可行性和实用化方面都取得了突破性的进展。中国从20世纪80年代开始进行无人驾驶汽车的研究,国防科技大学在1992年成功研制出中国第一辆真正意义上的无人驾驶汽车,其他欧美国家都有自己的无人车项目,这些项目的出发点都是造军用无人驾驶车,在1980年左右,美国和欧洲国家在无人驾驶技术方面已经迅速的得到发展,而中国是紧随其后,虽然技术落后甚多。八五期间,由北理和国防科大等高校联合研制的ATB-1无人车,可以达到时速21公里,这标志这中国无人驾驶正式起步。2014年11月20日 解放军军事交通学院研发无人驾驶车辆在高速路上进行了测试,最高时速110公里/小时,自主变道36次,一举夺得“中国智能车未来挑战赛”的冠军。而2015年长安实现了从重庆到北京的高速路无人驾驶测试。从这些方面可以看到中国无人驾驶车的技术进步是非常大的。
说到国外的无人驾驶,可能大家最先想到google的无人车,因为它的车最先进入城市道路落地测试,稳定性比较好,出错非常少,口碑和风头都很足,所以很多人记住了,其实在这之前,美国的智能车比赛已经有很多NB的车能够在马路上飞奔了,只不过关注度和知名度没那么高。国外的无人驾驶技术积累非常足,国内对这方面的研究比较落后,这也是为什么最近通用的无人车已经在洛杉矶这样的大城市复杂的路况下测试了很久了,而咋们的城市无人驾驶车至今还没有落地进行测试的影子,很多国内的无人驾驶车都是有限条件下跑,咋们搞的也不晚,只能说高校没有这种雄心去整合,军用一直没有停止过研究和发展,但是民用需要依托高校的研发实现商用化,这还有非常远的路要走。
上面说到的通用无人驾驶,看到这些视频就知道国外的无人驾驶发展的地步了。这是2017年通用自动驾驶发布的自动驾驶测试视频。
第一视角体验通用自动驾驶第二弹 - 腾讯视频https://v.qq.com/x/page/m0373fiwrvp
视频截图:


上面的无人驾驶使用的技术主要依赖传感器,使用了雷达、摄像头等, 车联网马上也会用到无人驾驶上,无人驾驶的技术对传感器的依赖将会增加成本和控制的难度,使用车联网来传递一些稳定的信号以减少无人驾驶环境感知,比如使用V2X来传递交通灯的信号、车道信息、前方道路情况,这样将会减少对传感器的依赖程度,增强对环境的适应性。
总体来讲,无人驾驶的的发展:军用到民用,从特殊环境到普通环境,从多传感器融合到传感器+车联网
在无人驾驶(自动驾驶)出现之前,很多无人驾驶的技术作为辅助驾驶技术得到了商业的推广和应用,Mobileye就是ADAS的行业先驱,ADAS包括:车道偏离、前碰撞预警、行人检测、交通灯检测、移动物体检测等,这些技术作为辅助驾驶技术,只提供预警,不干预车辆的驾驶。ADAS可以说是无人驾驶的技术试金石。
再来看一下两个极端情况下的车辆自动驾驶测试:
第一个是:夜晚+雨天
这是Drive.ai的杰作,是MIT的一个团队
A rainy night is no trouble for this self-driving car - The Verge
http://www.theverge.com/2017/2/14/14610614/drive-ai-self-driving-car-rain-video
第二个是:雪天,这是福特的杰作
http://www.theverge.com/2016/1/11/10745508/ford-snow-self-driving-testing-naias-2016
二、自动驾驶的分级
首先看一下这篇文章:
干货分享|谷歌、苹果都在争相研发的自动驾驶,究竟是什么?https://mp.weixin.qq.com/s/DS3q0EqzcKU5PiTD0JODKw
(很详细,本文有几张图放的就是该文章中的,盗图旨在讲的更加详细,不想花时间自己再造图了)
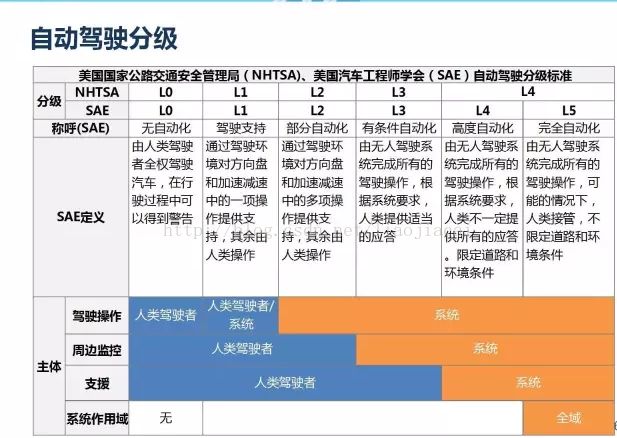
现在对无人驾驶的分类是依据美国国家公路交通安全管理局和美国汽车工程师学会定义的,分为五个等级,上面的链接文章中有,我不啰嗦了。按照我的理解,可以分为三个等级:辅助驾驶、半自动驾驶、自动驾驶。
辅助驾驶:通过环境感知,为驾驶员提供决策和预警信息。人驾驶车辆,无人驾驶技术只提供辅助作用
半自动驾驶:驾驶员干预和纠正车辆的自动驾驶。以车辆自动驾驶为主,人干预驾驶为辅助。在特殊情况下只能依靠人来完成驾驶任务。
全自动驾驶:自动驾驶为主,人只提供辅助驾驶,不干预车辆自动驾驶
下面看一下美国的标准,划分的的更加详细
自动驾驶的定义和发展阶段:
自动驾驶的目的:
其实出现自动驾驶后,很多人觉得没有必要,特别是最初谷歌的无人驾驶使用了高昂的穿传感器,使大家觉得民用遥不可及,成本贵,风险比较高,不可靠等,那么还不如人自己来开车了,但是自动驾驶能够解决的问题远远不止代替人驾驶的的问题,它还有以下的功能:
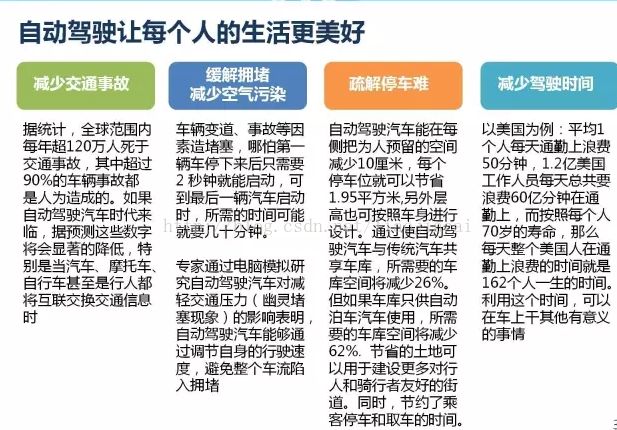
除了上面列举的功能外,无人驾驶的军用技术对于一些特殊行业来讲,还有很多特殊的功能,比如采矿、消防等特种车辆的自动驾驶,将解决当前高危行业和一些危险工况下人参与的风险。这些功能不一一列举。对于中国的特殊情况:地理环境复杂、人口众多、道路交通拥挤的情况,无人驾驶最有可能出现在特种车和特定的工作环境下;发展应用的路线基本上是从城市道路到农村道路,从高速到国道省道。
自动驾驶首先会应用在景区、公交等固定路线的场景中,会首先应用在特种车上面,应用在特定的情况下,其次是高速(货运、客运),再其次就是一般城市道路、普通乡村道路。应用的场合和驾驶技术应用程度有关,比如是人车交互驾驶或者是全自动驾驶等等。
自动驾驶的分级:
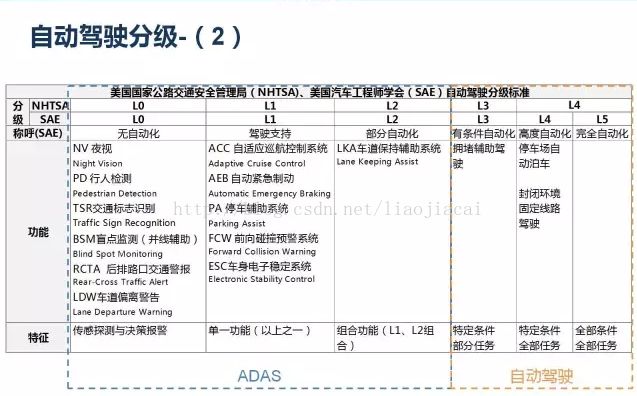
按照上面NHTSA的分类,各阶段的功能可以为:
L0:辅助驾驶系统;ADAS驾驶系统,主要有LDW、FCW、PCW、MOD等,这些都是起到辅助驾驶,提醒和警示作用,不干涉驾驶员的驾驶
L1:干预性辅助驾驶;AEB,检测前方的障碍物,并提供刹车制动,ACC,跟随模仿前方车辆驾驶,保持安全距离
L2:半自动驾驶;LKA车道保持,人在良好交通状况下选择性的启动自动驾驶,这个阶段感觉已经被直接跳过了,人驾驶为主,车自动驾驶为辅助
L3:人车交互驾驶;车自动控制驾驶,人参与指挥车辆驾驶,车自动驾驶为主,人驾驶为辅助
L4:全自动驾驶:人不做任何指挥或控制车辆驾驶,由车辆全自助驾驶
下面是具体的给出各个阶段实现的功能,上面我写的只是举例,没有完整,当然下面的也没有举例完整;
L0还有疲劳检测预警、主动式安全带,主动头枕(这是我导师做的东西,根据危险工况,安全带自动拉紧、头枕向前保护头部、颈部等)。
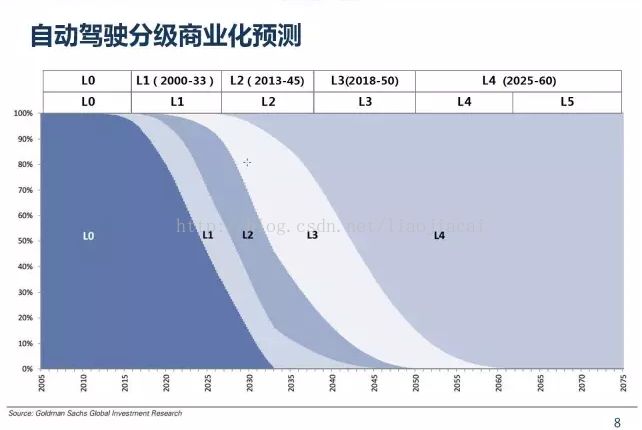
自动驾驶商业化分级:
这个表基本上反应了自动驾驶的一些情况,其中ADAS是集成是当前普及和走向前装的最火热时期,和表上的时间基本吻合,按照表上的预测,2033年左右,L0结束,基本意味这ADAS这时候已经被淘汰,即,2033年左右,当前市场上的ADAS只有预警功能的会被淘汰掉,取而代之的是L1阶段,即干预性的辅助驾驶系统,不仅预警,而且参与车辆控制驾驶。
L2和L3这两个阶段占据的时间比较长,其反应的是人、车对驾驶控制的比例变换的两个阶段,这两个阶段实现车辆自动驾驶的过度,人驾驶车辆的比例逐渐减少,车辆自动驾驶的比例逐渐增加。L4最先出现在2030年,即自动驾驶出现商业应用在2030年,普及在2060年左右,这也是上面说的自动驾驶的应用从特定道路和场景情况逐渐扩展到所有的驾驶情况。好吧我们有希望在2030年看到无人驾驶的公交车和货运车了,当然技术变换日新月异,可能会来的更早!!!
说到自动驾驶,就有车辆控制,当前车辆的驾驶控制主动权在车厂,除非改装。这就说明一个问题,从L1以后,只有汽车制造厂商主动参与自动驾驶的技术变革,放开车辆控制的控制权,这样才能快速的推进自动驾驶走向商业化,否则依靠改装和后装市场对CAN信号的解码这种不规范的行为,将会导致汽车市场的混乱和极大的社会危害,另一方面,汽车厂商在开放汽车控制权或者主动加入自动驾驶技术时,也需要考虑到最重要的汽车驾驶安全问题,特别需要注意车联网后,车辆的信息泄露,特别是控制信息的泄露,将会带来的危害及防止措施。