数字图像处理基础实验(五):频域滤波
一、实验内容及原理
1、 灰度图像的 DFT 和 IDFT
具体内容:利用 OpenCV 提供的 cvDFT 函数对图像进行 DFT 和 IDFT 变换 。
2、 利用理想高通和低通滤波器对灰度图像进行频域滤波
具体内容:利用 cvDFT 函数实现 DFT,在频域上利用理想高通和低通滤波 器进行滤波,并把滤波过后的图像显示在屏幕上(观察振铃现象),要求截止频 率可输入。
3、 利用布特沃斯高通和低通滤波器对灰度图像进行频域滤波
具体内容:利用 cvDFT 函数实现 DFT,在频域上进行利用布特沃斯高通和 低通滤波器进行滤波,并把滤波过后的图像显示在屏幕上(观察振铃现象),要 求截止频率和 n 可输入。
二、实验代码
实验环境:
(1)OpenCV3.4.3
(2)Ubuntu16.04
(3)VS Code
(4)C++
#include
#include
#include
#include
#include
#include
class Experiment5 {
public:
Experiment5(std::vector path){
filter_name.push_back("理想低通滤波器");
filter_name.push_back("理想高通滤波器");
filter_name.push_back("布特沃斯低通滤波器");
filter_name.push_back("布特沃斯高通滤波器");
for(int i = 0; i < path.size(); i++){
original_color_image.push_back(cv::imread(path[i]));
original_gray_image.push_back(color2Gray(original_color_image[i]));
zeroPadding(i);
gray_fourier.push_back(imageDFT(gray_image_padding[i]));
}
int row = gray_image_padding[0].rows, col = gray_image_padding[0].cols;
makeIdealLowPassFilterKernel(row, col);
makeIdealHighPassFilterKernel(row, col);
makeButterworseLowPassFilterKernel(row, col);
makeButterworseHighPassFilterKernel(row, col);
moveFourier();
std::cout<< "初始化结束" << "\n";
}
// 0 彩色图像转灰度图像
cv::Mat color2Gray(cv::Mat& src){
//创建与原图同类型和同大小的矩阵
cv::Mat gray_image = cv::Mat::zeros(src.rows, src.cols, CV_8UC1);
if(src.channels()!=1){
for(int i = 0; i < src.rows; i++)
for(int j = 0; j < src.cols; j++)
gray_image.at(i, j) = (src.at(i, j)[0] + src.at(i, j)[1] + src.at(i, j)[2]) / 3;
}
else
gray_image = src.clone();
return gray_image;
}
// 0.1 零填充
void zeroPadding(int pic_id){
int centeri = original_gray_image[pic_id].rows, centerj = original_gray_image[pic_id].cols;
cv::Mat image = cv::Mat::zeros(2*centeri, 2*centerj, CV_8UC1);
image(cv::Rect(centeri/2, centerj/2, centerj, centeri)) += original_gray_image[pic_id];
gray_image_padding.push_back(image);
}
// 0.2 生成理想低通滤波器
void makeIdealLowPassFilterKernel(int row, int col, double d0=80){
int centeri =row/2, centerj = col/2;
ideal_low_pass_filter = cv::Mat::zeros(row, col, CV_32F);
for(int i=0; i < ideal_low_pass_filter.rows; i++)
for(int j=0; j < ideal_low_pass_filter.cols; j++){
double d = sqrt(pow(i - centeri, 2) + pow(j - centerj, 2));
if(d < d0)
ideal_low_pass_filter.at(i,j) = 1;
}
}
// 0.3 生成理想高通滤波器
void makeIdealHighPassFilterKernel(int row, int col, double d0=12){
int centeri =row/2, centerj = col/2;
ideal_high_pass_filter = cv::Mat::zeros(row, col, CV_32F);
for(int i=0; i < ideal_high_pass_filter.rows; i++)
for(int j=0; j < ideal_high_pass_filter.cols; j++){
double d = sqrt(pow(i - centeri, 2) + pow(j - centerj, 2));
if(d > d0)
ideal_high_pass_filter.at(i,j) = 1;
}
}
// 0.4 布特沃斯低通
void makeButterworseLowPassFilterKernel(int row, int col, int n=2, double d0=80){
int centeri =row/2, centerj = col/2;
butter_low_pass_filter = cv::Mat::zeros(row, col, CV_32F);
for(int i=0; i < butter_low_pass_filter.rows; i++)
for(int j=0; j < butter_low_pass_filter.cols; j++){
double d = sqrt(pow(i - centeri, 2) + pow(j - centerj, 2));
butter_low_pass_filter.at(i,j) = 1/(1 + pow(d/d0,n));
}
}
// 0.5 布特沃斯高通
void makeButterworseHighPassFilterKernel(int row, int col, int n=2, double d0=10){
int centeri =row/2, centerj = col/2;
butter_high_pass_filter = cv::Mat::zeros(row, col, CV_32F);
for(int i=0; i < butter_high_pass_filter.rows; i++)
for(int j=0; j < butter_high_pass_filter.cols; j++){
double d = sqrt(pow(i - centeri, 2) + pow(j - centerj, 2));
butter_high_pass_filter.at(i,j) = 1/(1 + pow(d0/d,n));
}
}
// 0.6 傅里叶变换
cv::Mat imageDFT(cv::Mat& src_image){
cv::Mat src, fourier;
cv::Mat image = src_image;
// 实部:图像 , 虚部:全部用0填充
cv::Mat re_im[] = {cv::Mat_(image), cv::Mat::zeros(image.size(), CV_32FC1)};
// 将实部与虚部合并,形成一个复数
cv::merge(re_im, 2, src);
// 离散傅里叶变换
cv::dft(src, fourier);
return fourier;
}
// 0.7 移动傅里叶变换,将低频从四个角,移动到中心
void moveFourier(){
cv::Mat src = gray_image_padding[0];
//int row = src.rows, col = src.cols;
for(int i = 0; i < gray_fourier.size(); i++){
cv::Mat fourier = gray_fourier[i];
cv::Mat plane[]={cv::Mat_(src), cv::Mat::zeros(src.size() , CV_32FC1)}; //创建通道,存储dft后的实部与虚部(CV_32F,必须为单通道数)
cv::split(fourier, plane);
cv::Mat tempu;
// 获取未移动时的频谱
cv::magnitude(plane[0],plane[1],tempu);
tempu += cv::Scalar::all(1);
cv::log(tempu, tempu);
// 归一化操作
cv::normalize(tempu, tempu, 1, 0, CV_MINMAX);
gray_fourier_re.push_back(tempu);
// 以下的操作是移动图像 (零频移到中心)
shiftCenter(plane[0]); // 实部
shiftCenter(plane[1]); // 虚部
// 存入向量
cv::Mat temp0 = plane[0].clone();
cv::Mat temp1 = plane[1].clone();
std::vector temp;
temp.push_back(temp0);
temp.push_back(temp1);
gray_fourier_center.push_back(temp);
// 获取原始图像的频谱图
cv::magnitude(plane[0],plane[1],plane[0]);
plane[0] += cv::Scalar::all(1);
cv::log(plane[0],plane[0]);
// 归一化操作便于显示
cv::normalize(plane[0],plane[0],1,0,CV_MINMAX);
gray_fourier_center_re.push_back(plane[0]);
}
}
// 0.8 移动到中心
void shiftCenter(cv::Mat& mat){
int cx = mat.cols/2;
int cy = mat.rows/2;
//元素坐标表示为(cx,cy)
cv::Mat part1(mat,cv::Rect(0,0,cx,cy));
cv::Mat part2(mat,cv::Rect(cx,0,cx,cy));
cv::Mat part3(mat,cv::Rect(0,cy,cx,cy));
cv::Mat part4(mat,cv::Rect(cx,cy,cx,cy));
cv::Mat temp;
// 位置交换
part1.copyTo(temp); //左上与右下交换位置
part4.copyTo(part1);
temp.copyTo(part4);
part2.copyTo(temp); //右上与左下交换位置
part3.copyTo(part2);
temp.copyTo(part3);
}
// 0.9 计算Mat类型的指数
void MatPow(cv::Mat& src, double exp){
for(int i = 0; i < src.rows; i++)
for(int j = 0; j < src.cols; j++)
src.at(i, j) = pow(src.at(i, j), exp);
}
// 2 频域滤波
void frequencyDomainFilter(int select=0){
cv::Mat filter_kernel;
cv::Mat re, im;
cv::Mat blur_r, blur_i, blur;
for(int i = 0; i < gray_fourier_center.size(); i++){
re = gray_fourier_center[i][0].clone();
im = gray_fourier_center[i][1].clone();
if(select == 0)
filter_kernel = ideal_low_pass_filter;
else if(select == 1)
filter_kernel = ideal_high_pass_filter;
else if(select == 2)
filter_kernel = butter_low_pass_filter;
else if(select == 3)
filter_kernel = butter_high_pass_filter;
// 相乘,滤波
cv::multiply(re, filter_kernel, blur_r);
cv::multiply(im, filter_kernel, blur_i);
cv::Mat plane1[] = {blur_r, blur_i};
// 实部与虚部合并
cv::merge(plane1, 2, blur);
imageIDFT(blur);
moveImage(i);
}
}
// 3 傅里叶逆变换
cv::Mat imageIDFT(cv::Mat& fourier){
cv::Mat invfourier;
cv::idft(fourier, invfourier, 0);
cv::Mat re_im[2];
// 分离傅里叶变换的实部与虚部
cv::split(invfourier, re_im);
cv::normalize(re_im[0], re_im[0], 0, 1, CV_MINMAX);
gray_ifourier_center.push_back(re_im[0]);
return re_im[0];
}
// 3.1 移动图像到中心位置
void moveImage(int id){
cv::Mat src_image = gray_ifourier_center[id];
int row = original_gray_image[id].rows, col = original_gray_image[id].cols;
cv::Mat dst_image = src_image(cv::Rect(row/2, col/2, col, row));
gray_image_process.push_back(dst_image);
}
// 3.2 数据类型转换
void Mat_convert2int(cv::Mat& src, cv::Mat& dst){
double value;
double max = findMatMax(src);
for(int i = 0; i < src.rows; i++)
for(int j = 0; j < src.cols; j++){
value = 255 * src.at(i, j) / max;
if(value > 255)
value = 255;
if(value < 0)
value = 0;
dst.at(i, j) = int(value);
}
}
// 3.3 寻找矩阵最大值:
double findMatMax(cv::Mat& src){
double max = 0;
for(int i = 0; i < src.rows; i++)
for(int j = 0; j < src.cols; j++){
if(src.at(i, j) > max)
max = src.at(i, j);
}
return max;
}
// 4 运行
void test_filter(int id){
frequencyDomainFilter(id);
std::cout< filter_name;
cv::Mat filter_kernel;
std::vector original_color_image;
std::vector original_gray_image;
std::vector gray_image_padding;
// 傅里叶变换
std::vector gray_fourier;
std::vector gray_fourier_re;
// 中心化
std::vector > gray_fourier_center;
std::vector gray_fourier_center_re;
// 傅里叶逆变换
std::vector gray_ifourier;
// 中心化的傅里叶变换,直接逆变换:
std::vector gray_ifourier_center;
// 频域滤波后的图像
std::vector gray_image_process;
// 滤波器在频域的表示:
cv::Mat ideal_low_pass_filter;
cv::Mat ideal_high_pass_filter;
cv::Mat butter_low_pass_filter;
cv::Mat butter_high_pass_filter;
};
int main(){
std::vector path;
path.push_back("/home/lyd/image_process/pic/lena.jpg");
Experiment5 a(path);
for(int i = 0; i < 4; i++)
a.test_filter(i);
return 1;
}
三、实验结果
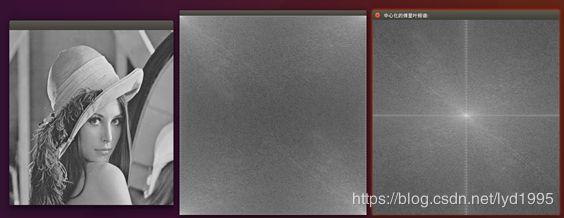
1、 灰度图像的 DFT 和 IDFT
2、 利用理想高通和低通滤波器对灰度图像进行频域滤波
3、 利用布特沃斯高通和低通滤波器对灰度图像进行频域滤波