Basler相机实时图像显示--Qt代码
Balser相机
前段时间,因为项目需要,师傅让我用Qt写巴斯勒相机实时画面的显示,网上找了好多资料,愚笨的我也没有弄明白该如何写,从相机的SDK中找到了用MFC写的例子,咱也没用过MFC呀,看不懂哎,最后师傅出马,写了一下,相机图像转换的位置师傅用他之前写的图像转换类,属于公司产品,我例子中就没用这个类,转而用opencv进行转换(网上找到的方法),本文后面会附上源码。
本程序的环境:
Pylon 6.0.0 + Opencv 4.1.0 +Qt 5.12.3 + Vs 2017 Community
pylon 6.0.0 : Pylon 6.0 下载地址
vs下的头文件包含
下面只说明Balser的头文件包含,opencv 和qt的头文件包含这里忽略。
下载好之后,包含include
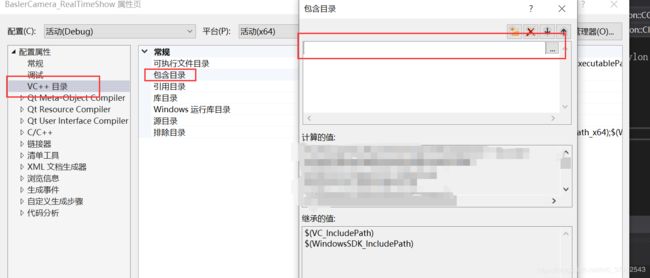
在其中填写如下路径:
XXX\Development\include
XXX\Development\Samples\C++\include
XXX\Development\Samples\C++\include路径也可以不包含,我是用来测试sample程序的,本源码就是仿照XXX/Development\Samples\C++\GUI_MFC这个Demo来写的。
下面来包含lib:
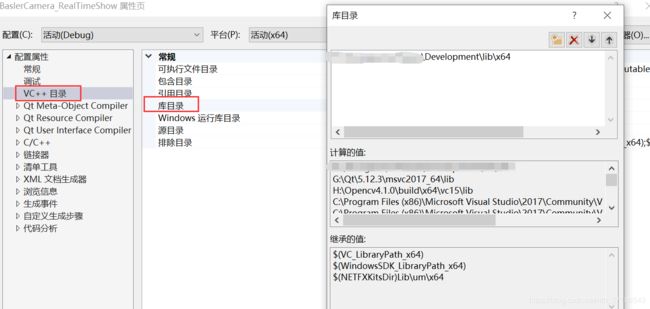
在其中填写如下路径:
XXX/Development\lib\x64 #我用的是X64版本的,X86请改为Win32
源码讲解:
main.c
#include "BaslerCamera_RealTimeShow.h"
#include
class PreWork
{
public:
PreWork()
{
Pylon::PylonInitialize();//相机的初始化程序,把它理解为安装
}
~PreWork()
{
Pylon::PylonTerminate();//停止运行相机的执行函数,把它理解为卸载
}
};
int main(int argc, char *argv[])
{
PreWork p;
//主要说明这一点,巧用构造函数和析构函数,来对相机进行安装和卸载
QApplication a(argc, argv);
BaslerCamera_RealTimeShow w;
w.show();
return a.exec();
}
Basler.c
#include "BaslerCamera_RealTimeShow.h"
#include
#include
#include
BaslerCamera_RealTimeShow::BaslerCamera_RealTimeShow(QWidget *parent)
: QMainWindow(parent)
{
ui.setupUi(this);
m_camera.RegisterImageEventHandler(this, Pylon::RegistrationMode_ReplaceAll, Pylon::Ownership_ExternalOwnership);
// Register this object as a configuration event handler, so we will be notified of camera state changes.
// See Pylon::CConfigurationEventHandler for details
m_camera.RegisterConfiguration(this, Pylon::RegistrationMode_ReplaceAll, Pylon::Ownership_ExternalOwnership);
// Add the AutoPacketSizeConfiguration and let pylon delete it when not needed anymore.
m_camera.RegisterConfiguration(new CAutoPacketSizeConfiguration(), Pylon::RegistrationMode_Append, Pylon::Cleanup_Delete);
m_camera.Attach(Pylon::CTlFactory::GetInstance().CreateFirstDevice(), Pylon::Cleanup_Delete);
m_camera.Open();
// Camera may have been disconnected.
if (!m_camera.IsOpen() || m_camera.IsGrabbing())
{
return;
}
// Since we may switch between single and continuous shot, we must configure the camera accordingly.
// The predefined configurations are only executed once when the camera is opened.
// To be able to use them in our use case, we just call them explicitly to apply the configuration.
m_continousConfiguration.OnOpened(m_camera);
// Start grabbing until StopGrabbing() is called.
m_camera.StartGrabbing(Pylon::GrabStrategy_OneByOne, Pylon::GrabLoop_ProvidedByInstantCamera);
ui.centralWidget->installEventFilter(this);//安装Qt的事件过滤器
connect(this, SIGNAL(OneImageFinishSignal()), this, SLOT(OneImageFinishSlot()));
}
void BaslerCamera_RealTimeShow::OnImagesSkipped(Pylon::CInstantCamera& camera, size_t countOfSkippedImages)
{
}
void BaslerCamera_RealTimeShow::OnImageGrabbed(Pylon::CInstantCamera& camera, const Pylon::CGrabResultPtr& grabResult)
{
m_mutexLock.lock();
m_ptrGrabResult = grabResult;//将捕获到的图像传递出去
//qDebug() << __FUNCTION__;
emit OneImageFinishSignal();
m_mutexLock.unlock();
}
void BaslerCamera_RealTimeShow::OneImageFinishSlot()
{
//qDebug() << __FUNCTION__;
ui.centralWidget->update();
}
bool BaslerCamera_RealTimeShow::eventFilter(QObject *watched, QEvent *event)
{
if (watched == ui.centralWidget && event->type() == QEvent::Paint)
{
showImage();
}
return false;
}
void BaslerCamera_RealTimeShow::showImage()
{
m_mutexLock.lock();
//qDebug() << "123" << endl;
// 新建pylon ImageFormatConverter对象.
CImageFormatConverter formatConverter;
Mat openCvImage;
QPainter painter(ui.centralWidget);
//确定输出像素格式
formatConverter.OutputPixelFormat = PixelType_BGR8packed;
//将抓取的缓冲数据转化成pylon image.
formatConverter.Convert(m_bitmapImage, m_ptrGrabResult);
// 将 pylon image转成OpenCV image.
openCvImage = cv::Mat(m_ptrGrabResult->GetHeight(), m_ptrGrabResult->GetWidth(), CV_8UC3, (uint8_t *)m_bitmapImage.GetBuffer());
QImage img((const unsigned char *)(openCvImage.data), openCvImage.cols, openCvImage.rows, openCvImage.cols * 3, QImage::Format_RGB888);
QRectF target;
target.setLeft(0);
target.setTop(0);
target.setSize(this->size());
QRectF source;
source.setLeft(0);
source.setTop(0);
source.setSize(img.size());
painter.drawImage(target,img, source);
m_mutexLock.unlock();
}
// Pylon::CConfigurationEventHandler functions
void BaslerCamera_RealTimeShow::OnAttach(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnAttached(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnDetach(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnDetached(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnDestroy(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnDestroyed(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnOpen(Pylon::CInstantCamera& camera)
{
Pylon::String_t strFriendlyName = camera.GetDeviceInfo().GetFriendlyName();
qDebug() << __FUNCTION__ << " - " << strFriendlyName.c_str();
}
void BaslerCamera_RealTimeShow::OnOpened(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnClose(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnClosed(Pylon::CInstantCamera& camera)
{
Pylon::String_t strFriendlyName = camera.GetDeviceInfo().GetFriendlyName();
qDebug() << __FUNCTION__ << " - " << strFriendlyName.c_str();
}
void BaslerCamera_RealTimeShow::OnGrabStart(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnGrabStarted(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnGrabStop(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnGrabStopped(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
m_camera.DeregisterConfiguration(&m_continousConfiguration);
}
void BaslerCamera_RealTimeShow::OnGrabError(Pylon::CInstantCamera& camera, const char* errorMessage)
{
qDebug() << __FUNCTION__;
}
void BaslerCamera_RealTimeShow::OnCameraDeviceRemoved(Pylon::CInstantCamera& camera)
{
qDebug() << __FUNCTION__;
}
BaslerCamera_RealTimeShow::~BaslerCamera_RealTimeShow()
{
Perform cleanup.
if (m_camera.IsPylonDeviceAttached())
{
try
{
// Close camera.
// This will also stop the grab.
m_camera.Close();
// Free the camera.
// This will also stop the grab and close the camera.
m_camera.DestroyDevice();
}
catch (const Pylon::GenericException& e)
{
qDebug() << e.what();
}
}
}
Balser.h
#pragma once
#include
#include "ui_BaslerCamera_RealTimeShow.h"
#include "AutoPacketSizeConfiguration.h"
//加载PYLON API.
#include
#include
#include
#include
// 加载OpenCV API
#include
#include
#include
#include
//命名空间.
using namespace Pylon;
using namespace std;
using namespace cv;
class BaslerCamera_RealTimeShow : public QMainWindow
, public Pylon::CImageEventHandler // Allows you to get informed about received images and grab errors.
, public Pylon::CConfigurationEventHandler // Allows you to get informed about device removal.
{
Q_OBJECT
signals:
void OneImageFinishSignal();
private slots:
void OneImageFinishSlot();
public:
BaslerCamera_RealTimeShow(QWidget *parent = Q_NULLPTR);
~BaslerCamera_RealTimeShow();
private:
Ui::BaslerCamera_RealTimeShowClass ui;
Pylon::CInstantCamera m_camera;
// The grab result retrieved from the camera
Pylon::CGrabResultPtr m_ptrGrabResult;
// The grab result as a windows DIB to be displayed on the screen
Pylon::CPylonBitmapImage m_bitmapImage;
Pylon::CAcquireContinuousConfiguration m_continousConfiguration;
QMutex m_mutexLock;
protected:
void showImage();
virtual bool eventFilter(QObject *watched, QEvent *event);
// Pylon::CImageEventHandler functions
virtual void OnImagesSkipped(Pylon::CInstantCamera& camera, size_t countOfSkippedImages);
virtual void OnImageGrabbed(Pylon::CInstantCamera& camera, const Pylon::CGrabResultPtr& grabResult);
// Pylon::CConfigurationEventHandler functions
virtual void OnAttach(Pylon::CInstantCamera& camera);
virtual void OnAttached(Pylon::CInstantCamera& camera);
virtual void OnDetach(Pylon::CInstantCamera& camera);
virtual void OnDetached(Pylon::CInstantCamera& camera);
virtual void OnDestroy(Pylon::CInstantCamera& camera);
virtual void OnDestroyed(Pylon::CInstantCamera& camera);
virtual void OnOpen(Pylon::CInstantCamera& camera);
virtual void OnOpened(Pylon::CInstantCamera& camera);
virtual void OnClose(Pylon::CInstantCamera& camera);
virtual void OnClosed(Pylon::CInstantCamera& camera);
virtual void OnGrabStart(Pylon::CInstantCamera& camera);
virtual void OnGrabStarted(Pylon::CInstantCamera& camera);
virtual void OnGrabStop(Pylon::CInstantCamera& camera);
virtual void OnGrabStopped(Pylon::CInstantCamera& camera);
virtual void OnGrabError(Pylon::CInstantCamera& camera, const char* errorMessage);
virtual void OnCameraDeviceRemoved(Pylon::CInstantCamera& camera);
};
main.c内容很简单,执行安装和卸载的函数
Balser.c在这里着重说明一下:
先说一下Balser获取实时图像的原理吧,网上也有很多,这里按照我的理解写一下。
1、Basler获取实时图像是一张一张的拍照,拍照-显示-拍照-显示…,所以我们看到的就是连续的图像。
2、Basler是事件驱动的,当拍完一张照片之后,会触发事件,然后执行的Balser提供的OnImageGrabbed函数, 这个原理可以理解为Qt的信号-槽
Balser.c的程序流程
捕获图像 —> 触发信号(事件)—> 执行OnImageGrabbed()函数,将图像保存到我们定义的类中(这里注意下m_mutexLock.lock();的使用,因为巴斯勒相机处理图像是多线程的,所以在使用变量的时候,要用线程锁保护)—>发送我们自定义的信号-因为构造函数已经连接好了信号与槽-执行OneImageFinishSlot()中的updata触发 event事件,判断该窗体时centralWidget,事件为QEvent::Paint,执行显示函数showImage()。显示函数就是把图像转换一下格式,用Painter画一下图(也用到了线程锁)
最后的源码:
总结一下,本人实力有限,写的比较啰嗦,希望大家能看懂。
如果大家下载源码,附上CSDN和Gitee链接,如果大家CSDN积分多,就赞助点小弟,如果没有积分,请使用Gitee链接。
最后附上下载链接:
CSDN链接地址:CSDN
Gitee链接地址:Gitee