An introduction to Policy Gradients with Cartpole and Doom(四)
https://www.freecodecamp.org/news/an-introduction-to-policy-gradients-with-cartpole-and-doom-495b5ef2207f/
前两篇文章介绍了Q-learning和DQL,都是value-based的强化学习算法。为了决定该state选择哪个action,我们通过Q-value来完成决策。因此,在value-based学习中,policy仅仅是因为action-value的预测而存在。
这篇,我们来学习policy-based的强化学习算法——Policy Gradients。
我们将应用到两个agents上。第一个是学习保持棒的平衡。
第二个是在Doom hostile中学会收集医药包来存活。
在policy-based方法中,并不是去学习一个价值函数,我们直接学习映射state到action的policy函数。
这意味着我们直接尝试优化policy函数 π \pi π,并不需要去担心价值函数。
当然,我们可以使用价值函数来优化policy参数,但是价值函数不用来选择action。
该篇,我们会学习:
- Policy Gradient是什么,它的优点和缺点是什么
Why using Policy-Based methods?
Two types of policy
一个policy可以是确定的,也可以是随机的。
一个确定的policy也就是一个将state映射到actions上的policy。你给它一个state,函数返回采取的action。
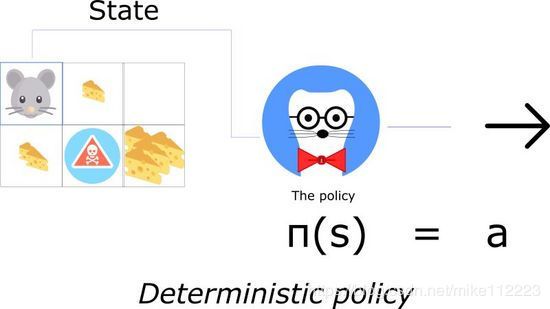
确定的policys在确定的环境中使用。在env中采取actions就决定了输出,不存在不确定性。例如,下棋时,你移动你的棋子从A2到A3,那么你可以确定你的棋子会移动到A3。
另一方面,一个随机的策略输出的是一个基于actions的概率分布。
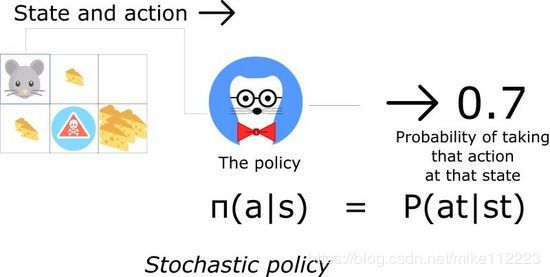
这意味着我们只有采取该action的概率。
随机policy用到env不确定的情况下。我们称这个过程Partially Observable Markov Decision Process(POMDP)。
大多数时间,我们会使用第二种policy。
Advantages
但是DQL已经很好了,为什么我们还要使用policy-based强化学习方法呢?
这里有三个使用Policy Gradients的主要优点。
Convergence
第一,policy-based方法有更好的收敛特性。
value-based方法的一个问题是在训练时,会有强烈的振荡。这是因为action的选择会因为预测的action values的任意微小的改变产生很大改变。
另一方面,policy gradient仅仅跟随梯度去寻找最优参数,我们可以在每一步上看到我们policy的平滑更新。
因为我们是跟随梯度来寻找最优参数的,这就确保我们会收敛到局部最优或者全局最优。

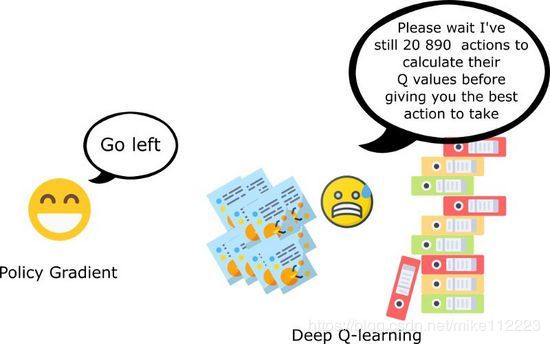
Policy gradients are more effective in high dimensional action spaces
第二个有点就是policy gradients在高维动作空间或者使用连续actions时更加有效。
DQL的问题就是它对每个可能的action都赋予了一个score。
但是如果我们有无限可能的动作呢?
比如,自动驾驶,在每个state,你有无数个动作选择(转15°,17.2°,按喇叭…)。
而policy-based方法,仅仅调整参数就行了:你开始理解最大值是什么,而不是在每一步直接预测最大值。
Policy gradients can learn stochastic policies
第三个优点是,policy gradient可以学习一个随机policy,但是价值函数不行。这就有两个结果。
第一,我们不需要施加一个探索/利用的权衡。一个随机policy就允许我们的agent对state空间进行探索。这是因为它输出的是一个关于actions的概率分布。结果就是不需要对探索/利用进行硬编码。
同时我们也解决了感知混淆问题。感知混淆是我们有两个看起来一样(或实际一样)的state,但是需要不同的actions。
比如,我们有一个智能真空吸尘器,它的目标是吸掉灰尘同时要避免杀死仓鼠。
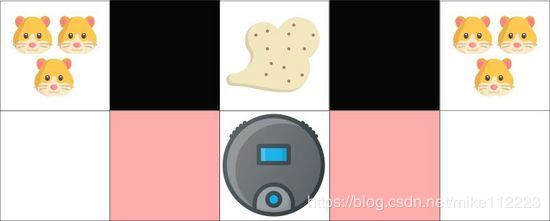
我们的真空吸尘器只能理解墙在哪里。
问题是两个标红的state,它们是相似的states,因为在这两个状态agent都能感知到上面和下面的墙。
一个确定的policy,在标红的state要么左移,要么右移。显然不管哪种都会使我们的agent被困住,然后无法吸到灰尘。
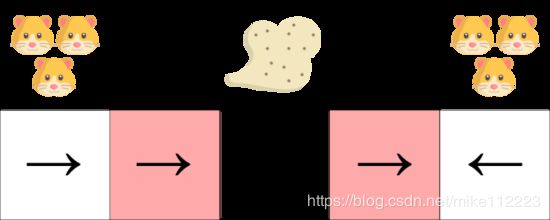
在value-based的强化算法中,我们学习一个类似确定的policy(“ ϵ \epsilon ϵ贪心策略”)。结果就是,我们的agent在找到灰尘之前会花费大量的时间。
另一方面,一个最优的随机policy是在该状态下随机左右移。结果就是,不会被困住,并且会以最高的概率达到目标state。

Disadavntages
自然地,Policy gradients有一个很大的缺点。大多数情况,它们都会收敛到一个局部最优解上,而不是全局最优。
不像DQL,总是尝试要去达到最大值,policy gradients收敛的更慢。它们会需要训练更长的时间。
但是,我们来看看解决这个问题的方案。
Policy Search
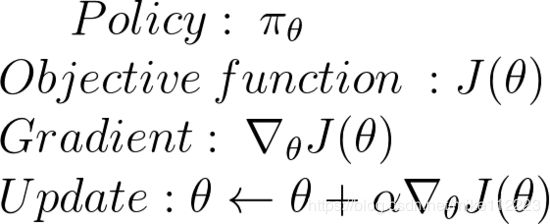
我们有policy π \pi π 以及其参数 θ \theta θ。 π \pi π输出一个关于actions的概率分布。
π θ ( a ∣ s ) = P [ a ∣ s ] \pi_\theta(a|s)=P[a|s] πθ(a∣s)=P[a∣s]
哇哦!但是我们怎样知道我们的policy是好是坏呢?
记住policy可以被看做是一个优化问题。我们必须找到最优参数来最大分数函数 J ( θ ) J(\theta) J(θ)。
J ( θ ) = E π θ [ ∑ γ r ] J(\theta)=E_{\pi \theta}[\sum \gamma r] J(θ)=Eπθ[∑γr]
这里有两步:
- 用一个policy分数函数 J ( θ ) J(\theta) J(θ)来评估policy
- 使用policy gradient上升来找到最优参数
First Step:the Policy Score function J ( θ ) J(\theta) J(θ)
为了评估policy效果,我们使用目标函数(或者策略分数函数)来计算policy的期望回报。
对于优化策略,有三种等效的方法。选择仅取决环境和你的目标。
第一,在情节的环境中,我们可以使用一个起始value,然后计算从第一个时间步(G1)开始得到的平均回执。这是整个情景的累计折扣回报。

这个思路是很简单的。如果我总是从state s1出发,那么我从开始到最后所能得到的总reward是多少呢?
我们想要找到一个最大化G1的策略,因为这会是最优的策略。这是基于我们在第一篇文章提到的reward假设。
例如,我们玩一个新的弹球游戏,在打掉20个砖块之后,我没有接到球(游戏结束)。这时新的情景又会从同一个state开始。
我使用 J 1 ( θ ) J_1(\theta) J1(θ)来计算分数。击中20个砖块很不错,但是我想要提升我的分数。为此,我需要通过调整参数来提升actions的概率分布。这就发生在step2。
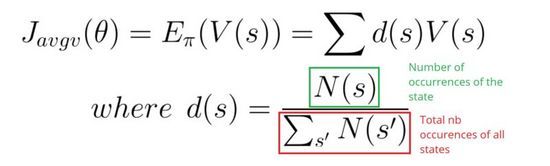
第二,在一个连续环境里,我们可以使用平均value,因为我们无法依赖一个具体的start state。
每个state的value通过对应state触发的概率进行加权。
第三,我们可以使用每个时间步的平均reward。这里思想就是在每个时间步我们想要得到更多的reward。
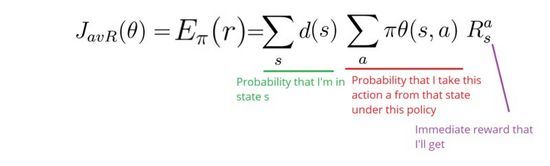
Second step: Policy gradient ascent
我们使用策略分数函数来告知我们策略的好坏。现在,我们想要找到一组参数来最优化我们的分数函数。
最大化分数函数意味着寻找最优策略。
为了最大化分数函数 J ( θ ) J(\theta) J(θ),我们需要在policy参数上做梯度上升。
梯度上升与梯度下降相反。记住梯度总是指向变化最明显的点。
为什么我们使用梯度上升而不是梯度下降呢?因为我们我们的分数函数并不是error函数,我们要求的是最大值不是最小值。
思想就是找到当前policy的梯度,然后根据梯度方向更新参数,然后迭代。
好了,现在我们来数学上实现这个。
我们想要找到最优参数:
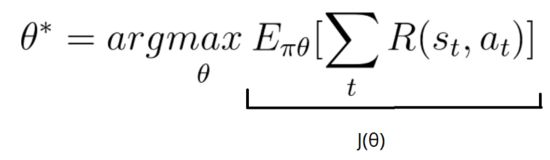
我们的分数函数被定义为:
这是在给定policy下,期望reward的总和。
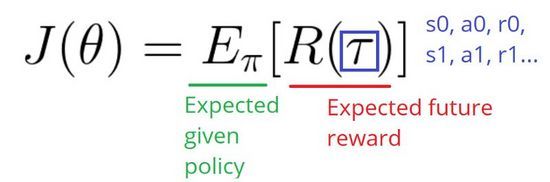
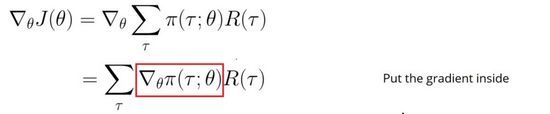
现在,因为我们想要做梯度上升,我们需要对分数函数求导。我们的分数函数也可以被定义为:

我们这样写是为了展示我们所面临的问题。
我们知道policy的参数会改变actions的选择,这会影响到我们得到的rewards,会看见的states以及看见这些states的频率。
所以,要找到policy改变来确保提升是很具有挑战性的。这是因为性能取决于动作的选择和做这些选择的states的分布。policy的参数同时影响这上述两点。policy参数对于动作的影响是很容易找到的,但是我们如何找到对于state分布的影响呢?环境函数是未知的。
因此,我们面临一个问题:如何估计基于policy 参数 θ \theta θ的 ∇ \nabla ∇(gradient)?它之所以是个问题是因为梯度取决于策略改变带来的对于state的分布的未知影响。
解决方法将会用到Policy Gradient Theorem。该理论为我们提供了一个关于分数函数 J ( θ ) J(\theta) J(θ)的梯度的解析表达式,且并不引入对于state分布的微分。
计算如下:
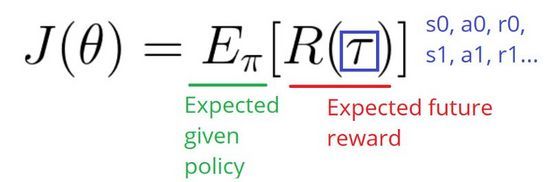
记住,我们实在使用随机策略。这意味着我们的策略输出的是一个概率分布 π ( τ ; θ ) \pi(\tau;\theta) π(τ;θ)。它输出的是在当前参数下,采取一系列步骤( s 0 , a 0 , r 0 , . . . . . . s_0,a_0,r_0,...... s0,a0,r0,......)的可能性。
但是对于一个概率函数进行求导是很难的,除非可以转化成对数形式。这会简单很多。
这里我们用到一个似然比trick来将分式替换成对数概率。
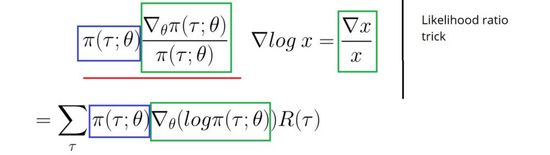
现在我们将求和转换成期望:
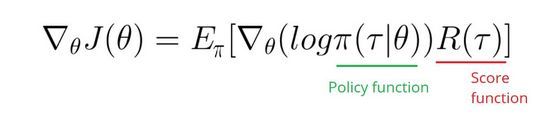
正如你看到的,我只需要计算对数policy函数的偏导就可以了。
好了说了这么多,现在我们来对policy gradients进行总结:
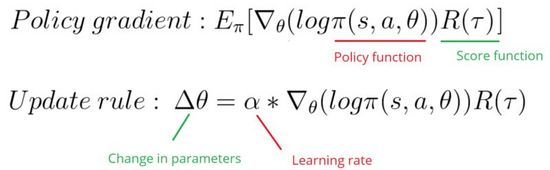
这个Policy gradient方法告诉我们如果我们想要取得更高的分数,我们需要通过改变policy参数来改变policy的分布。
R ( τ ) R(\tau) R(τ)像是一个价值分数标量:
- 如果 R ( τ ) R(\tau) R(τ)高,说明平均看来,我们采取的动作会得到高回报。我们想要推动我们的概率分布倾向于见过的动作(增加采取这些动作的概率)。
- 相反,如果 R ( τ ) R(\tau) R(τ)很低,我们想要减小见过动作的概率。
Policy Gradient会推动参数往拥有高回报的期望actions的方向走。
Monte Carlo Policy Gradients
对于情景采样任务,我们使用蒙特卡洛方法来设计policy gradient算法。
Initialize θ
for each episode τ = S0, A0, R1, S1, …, ST:
for t <-- 1 to T-1:
Δθ = α ∇theta(log π(St, At, θ)) Gt
θ = θ + Δθ
For each episode:
At each time step within that episode:
Compute the log probabilities produced by our policy function. Multiply it by the score function.
Update the weights
但是对于这个算法我们面临一个问题。因为我仅计算情景结束时的rewards,我们平均了所有actions。即使一些actions的效果很差,如果我们的score很高,平均下来所有actions的结果都不错。
为了纠正这个policy,我们需要大量的样本,这就导致缓慢学习。
How to improve our Model?
下一篇我们会提到一些提升方法:
- Actor Critic:value-based算法和policy-based算法的混合。
- Proximal Policy Gradients:确保先前policy的偏导很小。