从零开始的机器人操作系统(ROS)(0)机器人漫谈以及双系统安装
1.不谈技术,咱们先搬个小板凳来聊聊机器人的前世今生:
<1>首先需要明确的一点是机器人的概念其实很宽泛,机器人(Robot)是自动执行工作的机器装置,它指一类自动运行的装置,而不是指人形的机器。
(1) 它可以是这种工业型或者特种机器人:主要用于焊接,装配,运输等等工业生产场合。对这类机器人我们并不陌生,富士康最近两年采购了几十万台的此类机械臂进行产业升级,虽然对绝大多数被辞退的工人来说,它的出现并不是一个好事,但是历史和技术的发展本就是一个重生的痛苦过程,涅磐之后,必是新生。

工业机器人

防爆机器人

农林渔业的特种机器人
不难看出,这类机器人都是从实用的角度出发,用于特殊的工业以及危险生产场合,完全没有人的形状,但是我们还是称之为机器人。
(2) 也可以是这种仿生型机器人

大狗(波士顿动力实验室)

蛇型机器人

仿生鸟形机器人
这类都是从仿生学的角度出发,寻找更高效和自然的机械结构,从而让机器的适应性更强,这种我们也称之为机器人。
(3) 仿人形机器人
它们通常是这样

或者这样

或者这样

咳咳,其实上面都是假的,2017年的机器人应该是这样

或者这样

再不行就卖个萌

这类机器人就是我们通常意义上讨论的机器人了,和上面的工业机器人还有仿生机器人的研究方向不同,这类机器人通常都是智能型机器人,研究它们的主要目的在于解析人的智能究竟是怎么一回事,还有该怎么样复现人的智能。它不用很有力量,但它得像人一样运动,它还得会思考。这类机器人一般用于服务,教育,医疗等行业,这个行业虽然还很稚嫩,但是势必会成为未来最受瞩目的行业之一 。
<2> 好了,机器人的概念稍微理清楚一点之后,让我们来回顾一下智能机器人的发展历史还有如今的状况把。
智能型机器人是最复杂的机器人,也是人类最渴望能够早日制造出来的机器朋友。
(1)历史发展:
1920年“机器人”这个词首先由作家作家卡雷尔·恰佩克在他的科幻小说中首次引进。
1939年西屋电气公司在美国纽约世博会上展出了自己制造的家用机器人Elektro,它由电缆控制,可以行走,会说77个字,甚至可以抽烟,虽然它离真正的机器人还差得远。但它让人们对家用机器人的憧憬变得更加具体。
1942年 美国科幻巨匠阿西莫夫提出“机器人三定律”。虽然这只是科幻小说里的创造,但后来成为学术界默认的研发原则。
1948年 诺伯特·维纳出版《控制论——关于在动物和机中控制和通讯的科学》,阐述了机器中的通信和控制机能与人的神经、感觉机能的共同规律,率先提出以计算机为核心的自动化工厂。
1954年 在达特茅斯会议上,马文·明斯基提出了他对智能机器的看法:智能机器“能够创建周围环境的抽象模型,如果遇到问题,能够从抽象模型中寻找解决方法”。这个定义影响到以后30年智能机器人的研究方向。
1956年 美国人乔治·德沃尔制造出世界上第一台可编程的机器人,并注册了专利。这种机械手能按照不同的程序从事不同的工作,因此具有通用性和灵活性。
1959年 德沃尔与美国发明家约瑟夫·英格伯格联手制造出第一台工业机器人。随后,成立了世界上第一家机器人制造工厂——Unimation公司。由于英格伯格对工业机器人的研发和宣传,他也被称为“工业机器人之父”。
1962年 美国AMF公司生产出“VERSTRAN”(意思是万能搬运),与Unimation公司生产的Unimate一样成为真正商业化的工业机器人,并出口到世界各国,掀起了全世界对机器人和机器人研究的热潮。
1962年-1963年 传感器的应用提高了机器人的可操作性。人们试着在机器人上安装各种各样的传感器,包括1961年恩斯特采用的触觉传感器,托莫维奇和博尼1962年在世界上最早的“灵巧手”上用到了压力传感器,而麦卡锡1963年则开始在机器人中加入视觉传感系统,并在1964年,帮助MIT推出了世界上第一个带有视觉传感器,能识别并定位积木的机器人系统。
1965年 约翰·霍普金斯大学应用物理实验室研制出Beast机器人。Beast已经能通过声呐系统、光电管等装置,根据环境校正自己的位置。20世纪60年代中期开始,美国麻省理工学院、斯坦福大学、英国爱丁堡大学等陆续成立了机器人实验室。美国兴起研究第二代带传感器、“有感觉”的机器人,并向人工智能进发。
1968年 美国斯坦福研究所公布他们研发成功的机器人Shakey。它带有视觉传感器,能根据人的指令发现并抓取积木,不过控制它的计算机有一个房间那么大。Shakey可以算是世界第一台智能机器人,拉开了第三代机器人研发的序幕。
1969年 日本早稻田大学加藤一郎实验室研发出第一台以双脚走路的机器人。加藤一郎长期致力于研究仿人机器人,被誉为“仿人机器人之父”。日本专家一向以研发仿人机器人和娱乐机器人的技术见长,后来更进一步,催生出本田公司的ASIMO和索尼公司的QRIO。
1973年 世界上第一次机器人和小型计算机携手合作,就诞生了美国Cincinnati Milacron公司的机器人T3。
1978年 美国Unimation公司推出通用工业机器人PUMA,这标志着工业机器人技术已经完全成熟。PUMA至今仍然工作在工厂第一线。
1984年 英格伯格再推机器人Helpmate,这种机器人能在医院里为病人送饭、送药、送邮件。同年,他还预言:“我要让机器人擦地板,做饭,出去帮我洗车,检查安全”。
1998年 丹麦乐高公司推出机器人(Mind-storms)套件,让机器人制造变得跟搭积木一样,相对简单又能任意拼装,使机器人开始走入个人世界。
1999年 日本索尼公司推出犬型机器人爱宝(AIBO),当即销售一空,从此娱乐机器人成为机器人迈进普通家庭的途径之一。
2002年 美国iRobot公司推出了吸尘器机器人Roomba,它能避开障碍,自动设计行进路线,还能在电量不足时,自动驶向充电座。Roomba是目前世界上销量最大、最商业化的家用机器人。iRobot公司北京区授权代理商:北京微网智宏科技有限公司。(不禁汗颜,这不就是现如今某宝上卖的火的扫地机器人么)
2006年 6月,微软公司推出Microsoft Robotics Studio,机器人模块化、平台统一化的趋势越来越明显,比尔·盖茨预言,家用机器人很快将席卷全球。
(2)最新进展:
首先是科研界,最近几年对于智能机器人来说,有两个不得不提的重大突破。
其一,类似ROS,Andriod机器人操作系统以及中国的图灵机器人公司的Turing OS等开源机器人操作系统的出现以及蓬勃发展。
其二,神经网络以及深度学习的复兴带动的人工智能的进步。
第一个突破将硬件与开发者隔离开来,使得开发者不用每次都去自己从最底层的画图纸,制作机器人,在开源机器人操作系统的框架下面,开发者能够更加专心和高效的开发和探索智能。
第二个突破赋予了智能机器人更广的应用空间。智能机器人的几个关键技术:语音识别,机器视觉,语音对话,自主运动等等智能全都仰仗于人工智能的进步有了更好的表现。最标志性的事件莫过于16年Alpha Go 和李世乭的“人机大战”以AlphaGo 前三场就已经提前锁定胜局,最终以 4:1 比分大胜结束;以及17年年初的百度的机器人小度在《最强大脑》上的惊艳表现。
虽然谁都无法给出强人工智能诞生的准确时间,即使2017年的机器人看起还是萌萌的甚至有时候还是傻傻的,但是技术的奇点正在临近。各大机器人实验室以及人工智能实验室都在攻克一个又一个技术高地,无论是波士顿动力实验室研究的先进的机器人运动控制技术,还是孵化出大名鼎鼎的ROS机器人操作系统的斯坦福的人工智能研究室,都在运动,思考的层面探索机器的新的可能性。
其次,是产业界。
首先看看16年机器人行业发生了哪些事件还有16年机器人行业的发展概况:
16年5月美的欲收购德国库卡股份;
江苏昆山富士康机器换人,缩减员工6万;
“成都造”机器人明年参加高考;“高考机器人”已被列入国家科技部863计划(又称“超脑计划”)的首要任务。
2015年全球工业机器人销量超过24万台。
根据 IFR(国际机器人联合会) 预测显示,2015-2018年期间,个人/家庭用服务机器人的全球销量将高达2590万台,市场规模高达到122亿美元,超过2014年市场规模的5倍。专业服务用机器人的销售量会增加到15.2万台左右,市场规模会上升至196亿美元,接近2014年市场规模的5倍。

还有现在市场上较为主流的三种服务型机器人。

其次,人工智能界也是摩拳擦掌,斯坦福的两个人工智能界的大牛:李非非加盟谷歌,吴恩达加盟百度。就像十几年前的互联网,几年之前的移动互联网,人工智能已经成为下一个风口,一场大战一触即发,各家都在储备人才,准备大干一场。
产业界和学术界互动频繁,也注定了机器人和人工智能行业的火热。
所以当站在历史的风口,各位准备好起飞了么?
2.机器人操作系统ROS简介
1.ROS的定义以及它的重大意义:
先引用wikipidia上ROS(机器人操作系统,Robot Operating System)的一段基本介绍:
ROS是专为机器人软件开发所设计出来的一套电脑操作系统架构。它是一个开源的元级操作系统(后操作系统),提供类似于操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间消息传递、程序发行包管理,它也提供一些工具和库用于获取、建立、编写和执行多机融合的程序。
此处我们可以把ROS类比windows操作系统,windows可以安装在不同的品牌的电脑,不同类型的电脑上,我们不用关心这台电脑用的是什么芯片,有没有什么接口,我们可以把一个软件装在不同的电脑上,这就是操作 系统的好处,和硬件无关,在这套系统里开发的软件可以跑在很多不同的电脑上,只要这些电脑都安装了windows操作系统。这样我们就不用每次写一个软件和算法就根据硬件来调试一次,这样就节省了大量的时间用来开发更高效的算法和软件。
2.ROS的学习
必须具备的技能包括
C++以及python 编程语言;
linux操作系统中命令行操作;
各种研究方向,其实ROS只是一个平台和工具,学习了它并不代表就能做很多很有趣的事情,接下来就是看各位大大的研究兴趣额方向了,无论是机器视觉还是自然语言处理或者是人工智能就得看各位各显神通了!
在这个平台上可以做很多有趣的事,不过在探索自己的房间的时候,还是需要把房子的结构看个大概把。博主的这一系列博客就是基于此,记录自己这个小白的ROS学习历程,同时也给后来想入坑的同学门指明方向。
3.正式开始:第一步双系统安装
(1)首先需要配置一个linux环境,因为ROS对Ubuntu系统的支持比较好,所以我们就使用ubuntu系统,博主使用的是ubuntu14.04系统,此处注意,因为我们都是打算在ubuntu系统下大干一场的人,所以请打消在虚拟机中安装的Ubuntu系统中安装ROS的念头,否则,你会体会到什么叫一个刻骨铭心的慢和卡。
首先介绍下安装双系统的教程。 –
–下载Ubuntu14.04的镜像,此处我们使用中科大的软件源(点此链接)
点击右边的获取安装镜像

此处博主安装的是32位版的ubuntu ,所以选择选择ubuntu14.04.5(i386),同学们电脑允许的话推荐配置64位版本。

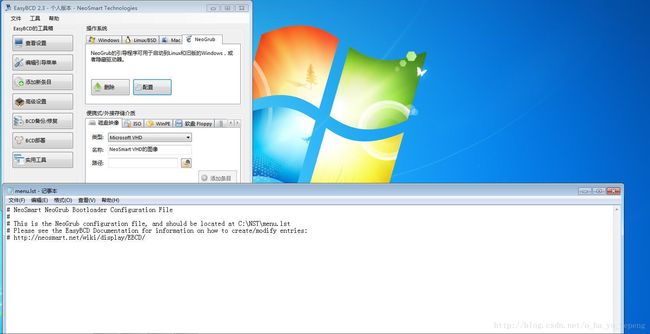
–好了,下载好系统之后,我们还需要下载一个引导安装系统的软件,叫EasyBCD2.3(点此链接获取),注意点进去如果需要帐号密码,两者都是www.linuxidc.com

下载解压,安装好之后点开软件

点添加新条目,选NeoGrub选项,然后点击安装,再点配置

出现记事本,将里面的内容替换为
title Install Ubuntu
root (hd0,0)
kernel (hd0,0)/vmlinuz boot=casper iso-scan/filename=/ubuntu-14.04.05-desktop-i386.iso ro quiet splash locale=zh_CN.UTF-8
initrd (hd0,0)/initrd.lz特别注意:
ubuntu-14.04.05-desktop-i386.iso是你的iso的名字,别写成我的了,这个要改成你的。
此处的(hd0,0)指的就是我们放置ubuntu14.04系统的c盘的hardware(硬件)分区,c盘默认是第主分区的第一个,序号从0开始,所以是(hd0,0)
替换好之后保存退出
退出之后去c盘查看,会看到以下来两个文件,即NST文件夹和NeoGrub文件。

然后把ubuntu-14.04.05-desktop-i386.iso镜像文件放到c盘中,
并用解压软件(博主用的是360解压缩)将镜像文件中的.dsk和casper文件夹下面的initrd.lz和vmlinuz文件复制到c盘下
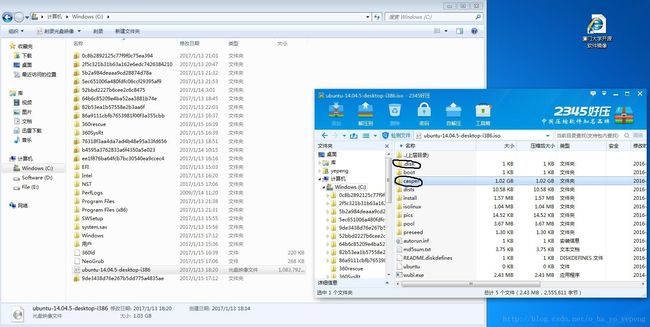
如图所示,全都复制好c盘会有以下六个文件。

–接下来我们需要给硬盘重新分区
右击我的电脑,点管理

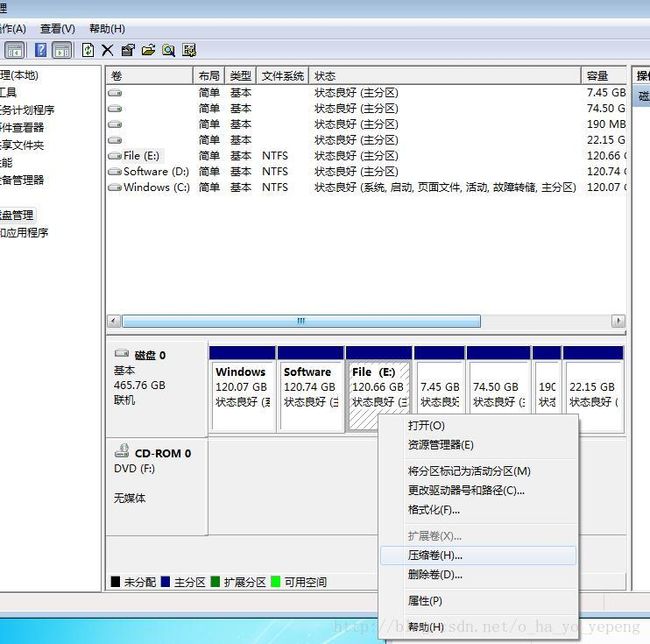
点 磁盘管理,然后尽量把后面几个盘空出来
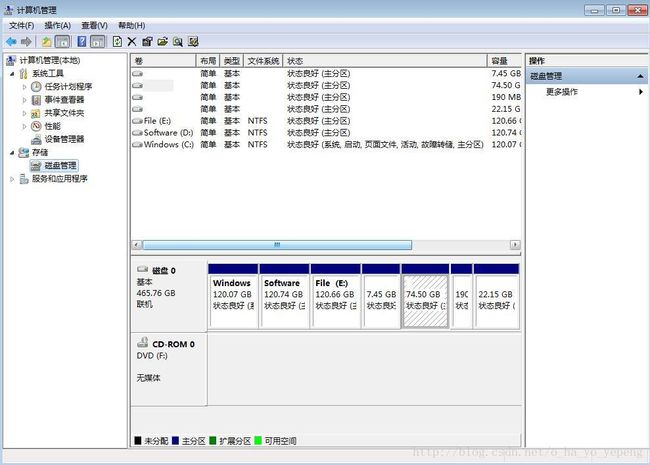
如果空闲的空间不够,右击压缩卷,腾出足够的空间,此处博主腾出了100G的空间,然后将所有腾出来的空间全部格式化,颜色显示为绿色可用空才行(注意此处因为博主已经装好双系统,此处只是演示,所以,颜色显示是紫色的已分区,而不是绿色的可用)
以上工作做完之后就可以开机重启了
因为此处博主已经装好双系统,此处就借用别处的图,仅做参考。
重新开机,狂按esc键(此处博主的电脑是hp,系统引导界面是通过按esc键出来的,各位具体电脑请自行百度进入引导界面的快捷键)按上下方向键,选择NeoGrub引导加载器,单击enter键

选择install ubuntu点击enter

进入引导安装环境,按组合键crrtl+alt+t 进入命令行终端

输入umount -l /isodevice这一命令取消掉对光盘所在 驱动器的挂载(注意,这里的-l是L的小写,-l 与 /isodevice 有一个空格。),否则分区界面找不到分区。

退出命令行终端,下面就点击桌面上的 安装Ubuntu 14.04开始安装。
语言选择中文

此处不建议联网,可以选上面一个选项,联网安装会下载一些不必要的插件,很浪费时间。


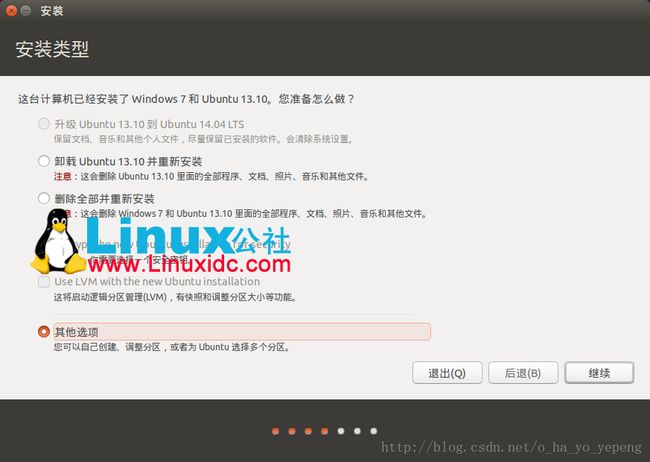
注意此处选安装类型,我们用其他选项。这样您可以自己创建、调整分区、或者为 Ubuntu 选择多个分区。
网上有推进分区的方案如下(以30G为例):
首先是交换空间
SWAP 2G
/ 20G ext4(根分区可以大点)
/home 8G ext4(剩下的给/home)
如果跟我学(30G),就
SWAP 3G
/ 50G ext4 (根分区)

都分好区后点击继续

地区选择上海

点击继续,接下来就是半小时左右的安装

按装好之后重启电脑

显示开机选项,默认进入 ubuntu环境,如果想进入windows环境,就选择windows。

进入后ubuntu和windows双系统就算装好了。

到此为止,我们的双系统就算配置好了,接下来一系列博客会陆续更新安装,配置和学习ros机器人操作系统的过程并且会记录博主在diy的类turtlebot平台上学习ros的经历。
参考以下博客:
[1] Windows 7下硬盘安装Ubuntu 14.04图文教程