ARKit 和 ARCore剖析、结构、原理介绍
ARKit 和 ARCore 都是三部分:相机姿态估计, 环境感知(平面估计)及光源感知。
ARCore 的部分源码:https://github.com/google-ar/arcore-unity-sdk/tree/master/Assets/GoogleARCore/SDK;
ARKit API: https://developer.apple.com/documentation/arkit
ARCore API: https://developers.google.com/ar/reference/
-相机姿态估计
Motion Tracking方面都是VIO.
ARKit 是特征点法,稀疏的点云:https://www.youtube.com/watch?v=rCknUayCsjk
ARKit recognizes notable features in the scene image, tracks differences in the positions of those features across video frames, and compares that information with motion sensing data. —-https://developer.apple.com/documentation/arkit/about_augmented_reality_and_arkit
ARCore 有猜测说是直接法估计的半稠密点云。但是google自己说是特征点,应该也是稀疏的了:
ARCore detects visually distinct features in the captured camera image called feature points and uses these points to compute its change in location.
—–https://developers.google.com/ar/discover/concepts
-环境感知(平面检测)
不太了解原理,摘了一些原文。
ARKit:
“…can track and place objects on smaller feature points as well…”
“…Use hit-testing methods (see the ARHitTestResult class) to find real-world surfaces corresponding to a point in the camera image….”
“You can use hit-test results or detected planes to place or interact with virtual content in your scene.”
检测不了垂直面
ARCore:
“ARCore looks for clusters of feature points that appear to lie on common horizontal surfaces…”
“…can also determine each plane’s boundary…”
” …flat surfaces without texture, such as a white desk, may not be detected properly…”
demo视频:https://www.youtube.com/watch?v=aSKgJEt9l-0
-光源感知
暂时不了解。
ARKit
参考博文:http://blog.csdn.net/u013263917/article/details/72903174
IPhone X添加了TrueDepth camera,也支持 ARKit使用。
一、简介
ARKit 框架
基于3D场景(SceneKit)实现的增强现实(主流)
基于2D场景(SpriktKit)实现的增强现实ARKit与SceneKit的关系
ARKit并不是一个独立就能够运行的框架,而是必须要SceneKit一起用才可以。
- ARKit 实现相机捕捉现实世界图像并恢复三维世界
- SceneKit 实现在图像中现实虚拟的3D模型
我们focus ARKit
二、ARKit
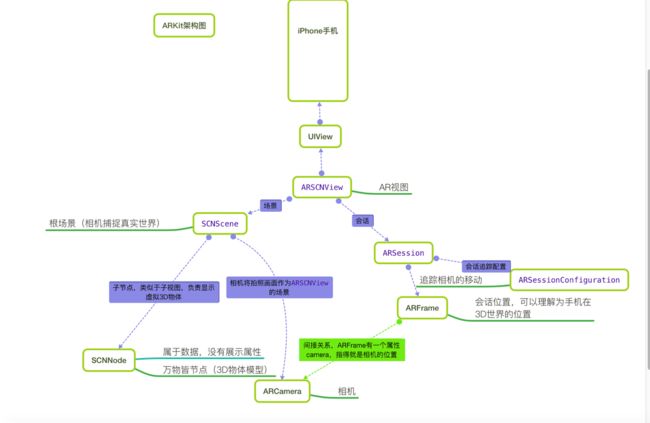
ARKit框架中中显示3D虚拟增强现实的视图ARSCNView继承于SceneKit框架中的SCNView,而SCNView又继承于UIKit框架中的UIView。
在一个完整的虚拟增强现实体验中,ARKit框架只负责将真实世界画面转变为一个3D场景,这一个转变的过程主要分为两个环节:由 ARCamera负责捕捉摄像头画面,由ARSession负责搭建3D场景。
ARSCNView与ARCamera两者之间并没有直接的关系,它们之间是通过AR会话,也就是ARKit框架中非常重量级的一个类ARSession来搭建沟通桥梁的。
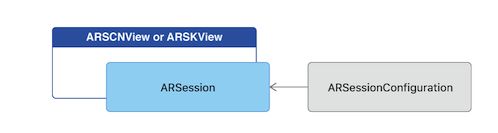
要想运行一个ARSession会话,你必须要指定一个称之为会话追踪配置的对象:ARSessionConfiguration, ARSessionConfiguration的主要目的就是负责追踪相机在3D世界中的位置以及一些特征场景的捕捉(例如平面捕捉),这个类本身比较简单却作用巨大。
ARSessionConfiguration是一个父类,为了更好的看到增强现实的效果,苹果官方建议我们使用它的子类ARWorldTrackingSessionConfiguration,该类只支持A9芯片之后的机型,也就是iPhone6s之后的机型
2.1. ARWorldTrackingSessionConfiguration 与 ARFrame
- ARSession搭建沟通桥梁的参与者主要有两个ARWorldTrackingSessionConfiguration与ARFrame。
ARWorldTrackingSessionConfiguration(会话追踪配置)的作用是跟踪设备的方向和位置,以及检测设备摄像头看到的现实世界的表面。它的内部实现了一系列非常庞大的算法计算以及调用了你的iPhone必要的传感器来检测手机的移动及旋转甚至是翻滚。
ARWorldTrackingSessionConfiguration 里面就是VIO系统
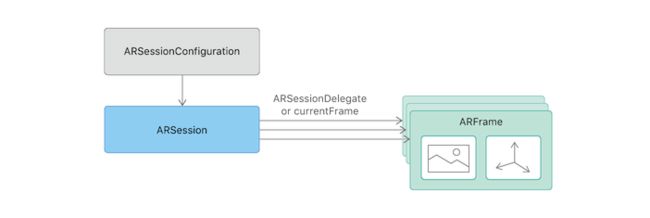
这里文中提到的ARWorldTrackingSessionConfiguration在最新的iOS 11 beta8中已被废弃,因此以下更改为ARWorldTrackingConfiguration当ARWorldTrackingSessionConfiguration计算出相机在3D世界中的位置时,它本身并不持有这个位置数据,而是将其计算出的位置数据交给ARSession去管理(与前面说的session管理内存相呼应),而相机的位置数据对应的类就是ARFrame
ARSession类一个属性叫做currentFrame,维护的就是ARFrame这个对象- ARCamera只负责捕捉图像,不参与数据的处理。它属于3D场景中的一个环节,每一个3D Scene都会有一个Camera,它觉得了我们看物体的视野。
2.2. ARSession
ARSession获取相机位置数据主要有两种方式
第一种:push。 实时不断的获取相机位置,由ARSession主动告知用户。通过实现ARSession的代理- (void)session:(ARSession )session didUpdateFrame:(ARFrame )frame来获取
第二种:pull。 用户想要时,主动去获取。ARSession的属性currentFrame来获取
2.3. ARKit工作完整流程
- ARSCNView加载场景SCNScene
- SCNScene启动相机ARCamera开始捕捉场景
- 捕捉场景后ARSCNView开始将场景数据交给Session
- Session通过管理ARSessionConfiguration实现场景的追踪并且返回一个ARFrame
- 给ARSCNView的scene添加一个子节点(3D物体模型)
ARSessionConfiguration捕捉相机3D位置的意义就在于能够在添加3D物体模型的时候计算出3D物体模型相对于相机的真实的矩阵位置
三、API分析
-AROrientationTrackingConfiguration
tracks the device’s movement with three degrees of freedom (3DOF): specifically, the three rotation axes;只跟踪三个,不如下面的这个。
-[ARWorldTrackingConfiguration](https://developer.apple.com/documentation/arkit/arworldtrackingconfiguration)
负责跟踪相机,检测平面。tracks the device’s movement with six degrees of freedom (6DOF)。
完成slam工作的主要内容应该就是在这个里面。
但启动一个最简单的AR, 只需要:
let configuration = ARWorldTrackingConfiguration()
configuration.planeDetection = .horizontal
sceneView.session.run(configuration)具体的实现被封装了。
然后与重要的ARSession类和ARSCNView的接口:
由于接口很多,只列部分,详细的转官网or参考博文:http://blog.csdn.net/u013263917/article/category/6959089
苹果有个自己的特色功能,Face-based AR experience。可以使用TrueDepth camera追踪人脸的表情,pose, topology等。world based AR experience 对应其它厂商的sdk,比如ARCore。
比如一些常用的信息接口:
虚拟物体的位置,ARFrame–>ARAnchor中有transform
相机的位置,ARFrame–>ARCamera 中displayTransform包含位姿
视图矩阵,投影矩阵:ARFrame–>ARCamera 中有projectMatrix,viewMatrix
-ARSession
| Tables | cols | cols |
|---|---|---|
| Configuring and Running a Session | func run(ARConfiguration, options: ARSession.RunOptions =) | Starts AR processing for the session with the specified configuration and options. |
| var configuration: ARConfiguration | An object that defines motion and scene tracking behaviors for the session. | |
| Responding to AR Updates | var delegate: ARSessionDelegate | An object you provide to receive captured video images and tracking information, or to respond to changes in session status. |
| protocol ARSessionDelegate | Methods you can implement to receive captured video frame images and tracking state from an AR session. | |
| Displaying and Interacting with AR Content | var currentFrame: ARFrame | |
| func add(anchor: ARAnchor) | Adds the specified anchor to be tracked by the session. |
-ARSCNView
ARSCNView即用户见到的界面。
| Tables | cols | cols |
|---|---|---|
| var session: ARSession | The AR session that manages motion tracking and camera image processing for the view’s contents. | |
| var scene: SCNScene | The SceneKit scene to be displayed in the view. | |
| Responding to AR Updates | protocol ARSCNViewDelegate | Methods you can implement to mediate the automatic synchronization of SceneKit content with an AR session. |
| func hitTest(CGPoint, types: ARHitTestResult.ResultType) | Searches for real-world objects or AR anchors in the captured camera image corresponding to a point in the SceneKit view. |
-ARCamera
ARCamera类里有很多相关的Topics:
| Tables | cols | cols |
|---|---|---|
| Handling Tracking Status | trackingState | The general quality of position tracking available when the camera captured a frame. |
| ARTrackingState | Possible values for position tracking quality. | |
| Examining Imaging Parameters | imageResolution | The width and height, in pixels, of the captured camera image. |
| Applying Camera Geometry | projectionMatrix | A transform matrix appropriate for rendering 3D content to match the image captured by the camera. |
| projectionMatrixForOrientation: | Returns a transform matrix appropriate for rendering 3D content to match the image captured by the camera, using the specified parameters. | |
| viewMatrixForOrientation: | Returns a transform matrix for converting from world space to camera space. |
-ARFrame
ARFrame 类里的Topics 可以看到slam输入输出接口
| Tables | cols | cols |
|---|---|---|
| Accessing Captured Video Frames | capturedImage | A pixel buffer containing the image captured by the camera. |
| capturedDepthData | The depth map, if any, captured along with the video frame. | |
| Examining Scene Parameters | camera | Information about the camera position, orientation, and imaging parameters used to capture the frame. |
| lightEstimate | An estimate of lighting conditions based on the camera image. | |
| displayTransformForOrientation: | Returns an affine transform for converting between normalized image coordinates and a coordinate space appropriate for rendering the camera image onscreen. | |
| Tracking and Finding Objects | anchors | The list of anchors representing positions tracked or objects detected in the scene. |
| hitTest:types: | Searches for real-world objects or AR anchors in the captured camera image. | |
| Debugging Scene Detection | rawFeaturePoints | The current intermediate results of the scene analysis ARKit uses to perform world tracking. |
| ARPointCloud | A collection of points in the world coordinate space of the AR session. |
关于特征点通过ARPointCloud可以看到特征点的个数和identitiers;
究竟是用的什么特征点?可能需要看下identitiers的维数等信息。SIFT 特征的descriptor是128维。
-ARLightEstimate
略
ARCore
google 发布了对应 Android studio、 Unity、Unreal以及Web的环境的ARCore。
API 官网:https://developers.google.com/ar/reference/。
SDK on Github :https://github.com/google-ar;
2017.12.15更新:google 添加了java ,C平台的支持。(原来的Android Studio部分放到了Java里)
ARCore的结构比较灵活,
AR中,在一个真实场景中绘制一个虚拟物体,在绘制之前,开发者所必需知道的信息:
虚拟物体的位置姿态
视图矩阵,投影矩阵
虚拟物体的光照信息
这些信息都可以从ARCore中得到。我们先看google提供的java平台里的Sample。
先理一下Sample里的绘制逻辑,关于绘制的类有:
BackgroundRenderer用于绘制摄像头采集到的数据。
VirtualObject用于绘制Android小机器人。
VirtualObjectShadow用于给Android机器人绘制阴影。
PlaneRenderer用于绘制SDK识别出来的平面。
PointCloud用于绘制SDK识别出来的点云。
采用的是Opengl ES绘制:配置GLSurfaceView,实现GLSurfaceView.Renderer接口。关于绘制的部分都可以替换,可以用一些更现代化的3D图形框架等。
提一下Renderer接口;
`public interface Renderer {
void onSurfaceCreated(GL10 gl, EGLConfig config);
void onSurfaceChanged(GL10 gl, int width, int height);
void onDrawFrame(GL10 gl);
}
onSurfaceCreated这个方法在可绘制表面创建或重新创建的时候被调用。在这个回调里,可以做一些初始化的事情。注意,此方法运行在OpenGL线程中,具有OpenGL上下文,因此这里可以进行执行OpenGL调用。
onSurfaceChanged 这个方法在可绘制表面发生变化的时候被调用。此时外部可能改变了控件的大小,因此我们需要在这个调用里更新我们的视口信息,以便绘制的时候能准确绘制到屏幕中来。
void onDrawFrame 核心方法。在绘制的时候调用。每绘制一次,就会调用一次,即每一帧触发一次。这里是主要的绘制逻辑。
参考:https://juejin.im/post/59ac1f2bf265da249517ac72
具体的实现见Sample吧。
获取虚拟物体的POSE,ViewMatrix 和ProjectMatrix以及光照这些必要信息的具体接口:
我们先看java平台。https://developers.google.com/ar/reference/java/com/google/ar/core/package-summary
虚拟物体的Pose:
ARCore规定,当你想放置的虚拟对象,你需要定义一个 锚Anchor,以确保ARCORE跟踪对象的位置随着时间的推移。
Anchor类

getPose就可以得到Anchor的当前位置。Sample 里调用 anchor.getPose().toMatrix(mAnchorMatrix, 0);得到了Anchor的位置矩阵,一个4x4 model-to-world transformation matrix, stored in column-major order。
视图矩阵和投影矩阵:
Camera类存储了这些信息:

Camera的属性会随着Session.update() is called update. 所以我们再看下Session类如何更新Camera。
Session类,Session类管理着AR 系统的状态, Session is the main entry point to ARCore API.
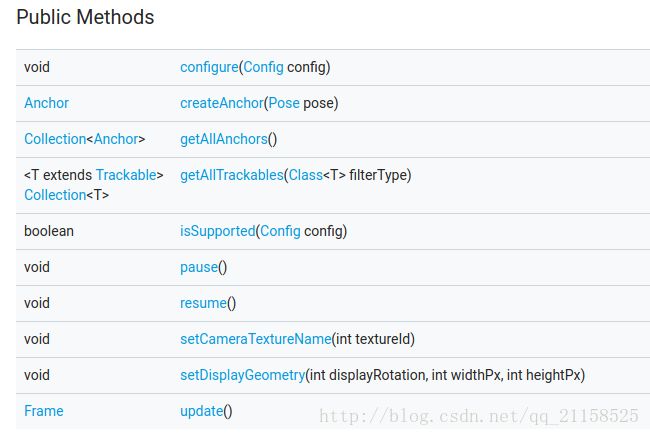
最后的update() 更新ARCore系统的状态,包括得到一个新的camera frame,更新device的位置,更新Anchor的位置,更新检测到的平面。新的camera 属性通过frame的getCamera()得到。
Frame类

hitTest是google的命中测试接口,检测用户是否点击到平面,是否加载虚拟物体。
光照暂时不关心。
C平台与Java 大同小异。
Session类:

Frame类,包括了Java中的Frame,Camera,HitResult,光照等类:

Anchor包括在Trackable类里:
