测试四种人脸检测方法(opencv,dlib,openpose,cnn)的戴口罩识别效果测试,终于找到了大佬发布的开箱即用的方法!
最近尝试做一个人脸检测控制机器人来测体温,记录一下过程,做戴口罩人脸识别下拉直接看第四个就行:
1、首先使用了opencv-ython试了一下人脸检测,参考https://blog.csdn.net/qq_32892383/article/details/90732916
先跑了一下固定图片的,效果堪忧啊

代码:
# -*- coding: utf-8 -*-
import c2
import lgging
# 设置日志
logging.basicConfig(level = logging.INFO, format='%(asctime)s - %(levelname)s: %(message)s')
logger = logging.getLogger(__name__)
# 待检测的图片路径
ImagePath = '1.jpg'
# 读取图片
logger.info('Reading image...')
image = cv2.imread(ImagePath)
# 把图片转换为灰度模式
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 探测图片中的人脸
logger.info('Detect faces...')
# 获取训练好的人脸的参数数据,进行人脸检测
face_cascade = cv2.CascadeClassifier(r'./haarcascade_frontalface_default.xml')
faces = face_cascade.detectMultiScale(gray,scaleFactor=1.15,minNeighbors=5,minSize=(3, 3))
search_info = "Find %d face."%len(faces) if len(faces) <= 1 else "Find %d faces."%len(faces)
logger.info(search_info)
# 绘制人脸的矩形区域(红色边框)
for (x, y, w, h) in faces:
cv2.rectangle(image, (x,y), (x+w,y+h), (0,0,255), 2)
# 显示图片
cv2.imshow('Find faces!', image)
cv2.waitKey(0)
ros环境下接收电脑摄像头的图像话题的实时检测代码:
# -*- coding: utf-8 -*-
#opencv固定图片检测
#2020.2.13
#by跃动的风
import cv2
import logging
import rospy
import roslib
from sensor_msgs.msg import Image
from geometry_msgs.msg import Pose
from cv_bridge import CvBridge,CvBridgeError
def ImageCB(data):
bridge = CvBridge()
image = bridge.imgmsg_to_cv2(data,"bgr8")
# 把图片转换为灰度模式
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 探测图片中的人脸
#logger.info('Detect faces...')
# 获取训练好的人脸的参数数据,进行人脸检测
face_cascade = cv2.CascadeClassifier(r'./haarcascade_frontalface_default.xml')
faces = face_cascade.detectMultiScale(gray,scaleFactor=1.15,minNeighbors=5,minSize=(3, 3))
search_info = "Find %d face."%len(faces) if len(faces) <= 1 else "Find %d faces."%len(faces)
rospy.loginfo(search_info)
# 绘制人脸的矩形区域(红色边框)
for (x, y, w, h) in faces:
cv2.rectangle(image, (x,y), (x+w,y+h), (0,0,255), 2)
cv2.imshow('Find faces!', image)
cv2.waitKey(1)
##ROS Node
if __name__ == '__main__':
#face_cascade = cv2.CascadeClassifier(r'./haarcascade_frontalface_default.xml')
try:
rospy.init_node('face_detect', anonymous=True)
rospy.loginfo('face_detect start...')
pub = rospy.Publisher('/face_detection', Image, queue_size = 10)
pub_face_coo = rospy.Publisher('/face_coo', Pose, queue_size = 3)
rospy.Subscriber('/usb_cam/image_raw',Image, ImageCB)
rospy.spin()
except:
pass
2,使用dlib检测
参考https://blog.csdn.net/Nirvana_6174/article/details/89599136
效果尚可,但是不能检测戴口罩的人脸
静态图片检测代码
import dlib
import numpy as np
import cv2
def rect_to_bb(rect): # 获得人脸矩形的坐标信息
x = rect.left()
y = rect.top()
w = rect.right() - x
h = rect.bottom() - y
return (x, y, w, h)
def resize(image, width=1200): # 将待检测的image进行resize
r = width * 1.0 / image.shape[1]
dim = (width, int(image.shape[0] * r))
resized = cv2.resize(image, dim, interpolation=cv2.INTER_AREA)
return resized
def detect():
image_file = "1.jpg"
detector = dlib.get_frontal_face_detector()
image = cv2.imread(image_file)
image = resize(image, width=1200)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
rects = detector(gray, 1)
for (i, rect) in enumerate(rects):
(x, y, w, h) = rect_to_bb(rect)
cv2.rectangle(image, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.putText(image, "Face: {}".format(i + 1), (x - 10, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
cv2.imshow("Output", image)
cv2.waitKey(1)
if __name__ == "__main__":
while 1:
detect()
if cv2.waitKey(1) & 0xFF == ord("q"):
break
3,使用openpose检测
效果极佳,就是环境配置很费劲。放一张效果图,检测戴口罩的毫无压力:

具体安装方法见另一篇文章https://blog.csdn.net/qq_23670601/article/details/104345718。
缺点是依赖太多,且在i7 7700HQ cpu下测试速度是0.1fps,gtx1060 gpu下测试速度为4.9fps.
2020-3月更新
4、发现有一位大佬公布了一个CNN模型和代码,开箱即用,终于解决了openpose的复杂依赖以及速度太慢的问题。地址如下:
https://github.com/ShiqiYu/libfacedetection
下载之后解压,新建文件夹build,之后在buid目录下
cmake ..
make
就可以用了。
使用摄像头测试一下:
./detect-camera-demo 0
效果如下:
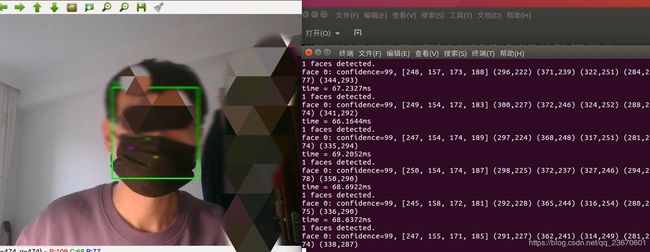
仅依赖cpu且速度相当之快!
撒花!!!终于找到了想象中的滑板鞋~~