STM32智能遥控小车,超详细-附下载直接可以用,双电源跑贼快!

简介
- 小车的动力部分由4个带减速箱的电机,和两个L298N电机驱动模块组成。
- 通过STM32核心板控制电机驱动模块,JDY-31蓝牙模块与手机通讯。
- 总共三块电池,一块专门给单片机供电,另外两块串联在一起同时给电机驱动模块供电(为什么选择分别供电后面的电源硬件部分有说)。
- 源码下载,提取码:nxo3
硬件
- 硬件的基本介绍

- 电机的位置很重要,因为电机驱动模块一个可以分别控制两个电机,而且程序里面也是分别控制单个电机的动作。
- 如果电机的和自己想要的运动方向不一样的话,交换一下接线端的两个线就好了。程序里面小车前进默认是电机1、2CW(顺时针),电机3、4CCW(逆时针)。
- L298N电机驱动模块
电机驱动模块这里不细讲,网上有很多资料,很简单的。
下面这个是右边的驱动板,控制电机1、2。

下面是左边的驱动板,控制电机3、4。

- 两个驱动板是并联的,供电时应选择粗一点的导线给驱动板供电,最好就不要使用杜邦线,如果使用杜邦线有可能会电压不够。
- 有的时候电机可能要用手转一下才能动,那是因为电压太小了,可以串联几个电池。我是用一个小米充电宝和4节干电池,电 压应该在10V左右。
- 注意不能串联太多充电宝,因为充电宝上面有过电流保护,电流太大充电宝可能会断电,甚至有可能会直接弄坏充电宝。
- 如果是双电源的话,单片机要和两个驱动板共地。
- 电机驱动模块上面的电机使能端的跳帽要拔掉,因为程序是用PWM来控制使能引脚的通点时长来让小车转弯的。
- 蓝牙模块JDY-31
我使用的是透传蓝牙模块,简单来说就是手机连接后给蓝牙发送什么数据,然后蓝牙模块再原封不动的通过串口发给单片机,所以只要懂串口的基本通信就好了。

- 0V和3.3V是从单片机上取电的,驱动板取电的话有可能会有干扰。
- PA2、PA3是单片机的串口2引脚。本来我想用串口1通讯的,但是好像串口1只能接受到单片机发出来的数据,不能用手机发送进去给单片机(有可能是因为串口1的时钟频率太高),而且串口1正好留出来下载程序,所以就选择了串口2。
- 蓝牙模块的默认波特率是9600,为了方便我也将串口的波特率也初始化成了9600。
- 蓝牙模块的STATE引脚是蓝牙的连接状态引脚,连接成功会变成高电平。该引脚我用来给小车做紧急刹车,当蓝牙没有连接或是断开小车会自动刹车,以免蓝牙突然断开时小车失控的运动。
- 电源
小车采用双电源供电

- 这里我选择用两个电源分别给单片机和驱动板供电的原因
电机启动会有很大的启动电流会在一瞬间将电流全部拉走,使得单片机断电,如果蓝牙模块也是从单片机上取点也会断电。
直接电机的电刷会产生火花对通讯有干扰,有些质量好的电机可能没有(不太确定是不是这个原因,但同电源时通讯确实有干扰,蓝牙会接收一些奇怪的数据)。 - 驱动板的两块电源串联连接,然后连接到驱动板的电源接线端。
程序
程序只要按照上面的连接都是可以直接使用,如果硬件有改动我也有定义宏可以直接做更改。
代码里面的注释比较详细,这里只是将重要的代码放上来,稍作讲解,最好是直接下载来看。
下载地址,提取码:z5us
- 目录结构
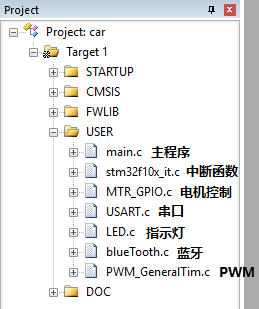
- main.c
#include "stm32f10x.h" // Device header
#include "MTR_GPIO.h"
#include "USART.h"
#include "LED.h"
#include "blueTooth.h"
#include "PWM_GeneralTim.h"
int main(void){
USART_Config();//串口
MTR_GPIOInit();//电机引脚
GENERAL_TIM_Init();//定时器PWM初始化,用于小车转向
blueToothInit();//蓝牙初始化
LEDInit();
printf("-----指令-----\n\
0x01:小车后退\n\
0x02:小车向左\n\
0x03:小车向右\n\
0x04:小车前进\n\
0x05:小车刹车\n\
0x06:电机停止\n\
0x07:小车逆时针\n\
0x08:小车转向停止\n\
0x09:小车顺时针\n");
while(1){
//如果蓝牙断开,小车会一直在刹车状态
if(BLUE_TOOTH_STATE != Bit_SET){
MTR_CarBrakeAll();
}
}
}
- 主要是各功能的初始化。
- 蓝牙状态的判断。
- stm32f10x_it.c
void DEBUG_USART_IRQHandler(void){
uint8_t CMD = 0;//接收的命令
if(USART_GetITStatus(DEBUG_USARTx,USART_IT_RXNE)!=RESET){
LED1_ON;
CMD = USART_ReceiveData(DEBUG_USARTx);//读取一个
switch(CMD){
case 0x06:
//电机停止
MTR_CarBrakeAll();
printf("0x06");
break;
case 0x08:
//小车转向停止
PWM_CarMaxGo();
printf("0x08");
break;
case 0x05:
//小车刹车
MTR_CarBrakeAll();
printf("0x05");
break;
case 0x02:
//小车向左
PWM_CarLeft();
printf("0x02");
break;
case 0x03:
//小车向右
PWM_CarRight();
printf("0x03");
break;
case 0x04:
//小车前进
MTR_CarGo();
printf("0x04");
break;
case 0x01:
//小车后退
MTR_CarBackGo();
printf("0x01");
break;
case 0x07:
//小车逆时针
MTR_CarCCW();
printf("0x07");
break;
case 0x09:
//小车顺时针
MTR_CarCW();
printf("0x09");
break;
}
LED1_OFF;//让LED闪烁来表示数据的接收
}
USART_ClearFlag(DEBUG_USARTx,USART_FLAG_RXNE);
}
- 串口通过接收十六进制的指令来控制驱动板。
- 接收到特定的指令后,单片机会将小车执行的指令再发送回给蓝牙。
- MTR_GPIO.c
#include "MTR_GPIO.h"
//刹车
void MTR_CarBrakeAll(void){
MTR1_BRAKE;
MTR2_BRAKE;
MTR3_BRAKE;
MTR4_BRAKE;
}
//前进
void MTR_CarGo(void){
MTR1_CW;
MTR2_CW;
MTR3_CCW;
MTR4_CCW;
}
//后退
void MTR_CarBackGo(void){
MTR1_CCW;
MTR2_CCW;
MTR3_CW;
MTR4_CW;
}
//顺时针
void MTR_CarCW(void){
MTR1_CCW;
MTR2_CCW;
MTR3_CCW;
MTR4_CCW;
}
//逆时针
void MTR_CarCCW(void){
MTR1_CW;
MTR2_CW;
MTR3_CW;
MTR4_CW;
}
void MTR_GPIOInit(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(MTR1_GPIO_CLK|MTR2_GPIO_CLK|MTR3_GPIO_CLK|MTR4_GPIO_CLK,ENABLE);//时钟
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
//电机1
GPIO_InitStructure.GPIO_Pin = MTR1_GPIO_PIN;
GPIO_Init(MTR1_GPIO_PORT, &GPIO_InitStructure);
//电机2
GPIO_InitStructure.GPIO_Pin = MTR2_GPIO_PIN;
GPIO_Init(MTR2_GPIO_PORT, &GPIO_InitStructure);
//电机3
GPIO_InitStructure.GPIO_Pin = MTR3_GPIO_PIN;
GPIO_Init(MTR3_GPIO_PORT, &GPIO_InitStructure);
//电机4
GPIO_InitStructure.GPIO_Pin = MTR4_GPIO_PIN;
GPIO_Init(MTR4_GPIO_PORT, &GPIO_InitStructure);
//小车刹车
MTR_CarBrakeAll();
}
注意:因为单片机是控制驱动板从而间接的控制电机,为了简单我直接把控制驱动板的引脚看成是控制电机的。
- 电机的引脚初始化。
- 小车前进、后退、原地旋转和刹车的函数封装。
- MTR_GPIO.h
#ifndef __MTR_GPIO_H
#define __MTR_GPIO_H
#include "stm32f10x.h"
/*
小车四轮驱动
电机1:右上
电机2:右下
电机3:左上
电机4:左下
*/
#define MTR1_GPIO_PORT GPIOB
#define MTR1_GPIO_CLK RCC_APB2Periph_GPIOB
#define MTR1_GPIO_PIN GPIO_Pin_6|GPIO_Pin_7
#define MTR1_CW {GPIO_ResetBits(MTR1_GPIO_PORT,GPIO_Pin_6);GPIO_SetBits(MTR1_GPIO_PORT,GPIO_Pin_7);}//顺时针
#define MTR1_CCW {GPIO_SetBits(MTR1_GPIO_PORT,GPIO_Pin_6);GPIO_ResetBits(MTR1_GPIO_PORT,GPIO_Pin_7);}//逆时针
#define MTR1_BRAKE GPIO_ResetBits(MTR1_GPIO_PORT,MTR1_GPIO_PIN);
#define MTR2_GPIO_PORT GPIOB
#define MTR2_GPIO_CLK RCC_APB2Periph_GPIOB
#define MTR2_GPIO_PIN GPIO_Pin_8|GPIO_Pin_9
#define MTR2_CW {GPIO_ResetBits(MTR2_GPIO_PORT,GPIO_Pin_8);GPIO_SetBits(MTR2_GPIO_PORT,GPIO_Pin_9);}//顺时针
#define MTR2_CCW {GPIO_SetBits(MTR2_GPIO_PORT,GPIO_Pin_8);GPIO_ResetBits(MTR2_GPIO_PORT,GPIO_Pin_9);}//逆时针
#define MTR2_BRAKE GPIO_ResetBits(MTR2_GPIO_PORT,MTR2_GPIO_PIN);
#define MTR3_GPIO_PORT GPIOB
#define MTR3_GPIO_CLK RCC_APB2Periph_GPIOB
#define MTR3_GPIO_PIN GPIO_Pin_12|GPIO_Pin_13
#define MTR3_CW {GPIO_ResetBits(MTR3_GPIO_PORT,GPIO_Pin_12);GPIO_SetBits(MTR3_GPIO_PORT,GPIO_Pin_13);}//顺时针
#define MTR3_CCW {GPIO_SetBits(MTR3_GPIO_PORT,GPIO_Pin_12);GPIO_ResetBits(MTR3_GPIO_PORT,GPIO_Pin_13);}//逆时针
#define MTR3_BRAKE GPIO_ResetBits(MTR3_GPIO_PORT,MTR3_GPIO_PIN);
#define MTR4_GPIO_PORT GPIOB
#define MTR4_GPIO_CLK RCC_APB2Periph_GPIOB
#define MTR4_GPIO_PIN GPIO_Pin_14|GPIO_Pin_15
#define MTR4_CW {GPIO_ResetBits(MTR4_GPIO_PORT,GPIO_Pin_14);GPIO_SetBits(MTR4_GPIO_PORT,GPIO_Pin_15);}//顺时针
#define MTR4_CCW {GPIO_SetBits(MTR4_GPIO_PORT,GPIO_Pin_14);GPIO_ResetBits(MTR4_GPIO_PORT,GPIO_Pin_15);}//逆时针
#define MTR4_BRAKE GPIO_ResetBits(MTR4_GPIO_PORT,MTR4_GPIO_PIN);
void MTR_CarBrakeAll(void); //小车刹车
void MTR_CarGo(void); //小车前进
void MTR_CarBackGo(void); //小车后退
void MTR_CarCW(void); //小车顺时针转
void MTR_CarCCW(void); //小车逆时针转
void MTR_GPIOInit(void);
#endif
- 电机引脚的头文件
- PWM_GeneralTim.c
#include "PWM_GeneralTim.h"
static void GENERAL_TIM_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 输出比较通道1 GPIO 初始化
RCC_APB2PeriphClockCmd(GENERAL_TIM_CH1_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = GENERAL_TIM_CH1_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GENERAL_TIM_CH1_PORT, &GPIO_InitStructure);
// 输出比较通道2 GPIO 初始化
RCC_APB2PeriphClockCmd(GENERAL_TIM_CH2_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = GENERAL_TIM_CH2_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GENERAL_TIM_CH2_PORT, &GPIO_InitStructure);
// 输出比较通道3 GPIO 初始化
RCC_APB2PeriphClockCmd(GENERAL_TIM_CH3_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = GENERAL_TIM_CH3_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GENERAL_TIM_CH3_PORT, &GPIO_InitStructure);
// 输出比较通道4 GPIO 初始化
RCC_APB2PeriphClockCmd(GENERAL_TIM_CH4_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = GENERAL_TIM_CH4_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GENERAL_TIM_CH4_PORT, &GPIO_InitStructure);
}
///*
// * 注意:TIM_TimeBaseInitTypeDef结构体里面有5个成员,TIM6和TIM7的寄存器里面只有
// * TIM_Prescaler和TIM_Period,所以使用TIM6和TIM7的时候只需初始化这两个成员即可,
// * 另外三个成员是通用定时器和高级定时器才有.
// *-----------------------------------------------------------------------------
// *typedef struct
// *{ TIM_Prescaler 都有
// * TIM_CounterMode TIMx,x[6,7]没有,其他都有
// * TIM_Period 都有
// * TIM_ClockDivision TIMx,x[6,7]没有,其他都有
// * TIM_RepetitionCounter TIMx,x[1,8,15,16,17]才有
// *}TIM_TimeBaseInitTypeDef;
// *-----------------------------------------------------------------------------
// */
/* ---------------- PWM信号 周期和占空比的计算--------------- */
// ARR :自动重装载寄存器的值
// CLK_cnt:计数器的时钟,等于 Fck_int / (psc+1) = 72M/(psc+1)
// PWM 信号的周期 T = ARR * (1/CLK_cnt) = ARR*(PSC+1) / 72M
// 占空比P=CCR/(ARR+1)
static void GENERAL_TIM_Mode_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
// 开启定时器时钟,即内部时钟CK_INT=72M
GENERAL_TIM_APBxClock_FUN(GENERAL_TIM_CLK,ENABLE);
/*--------------------时基结构体初始化-------------------------*/
// 配置周期
// 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断
TIM_TimeBaseStructure.TIM_Period=GENERAL_TIM_Period;
// 驱动CNT计数器的时钟 = Fck_int/(psc+1)
TIM_TimeBaseStructure.TIM_Prescaler= GENERAL_TIM_Prescaler;
// 时钟分频因子 ,配置死区时间时需要用到
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
// 计数器计数模式,设置为向上计数
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
// 重复计数器的值,没用到不用管
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;
// 初始化定时器
TIM_TimeBaseInit(GENERAL_TIM, &TIM_TimeBaseStructure);
/*--------------------输出比较结构体初始化-------------------*/
// 配置为PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
// 输出使能
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// 输出通道电平极性配置
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
// 输出比较通道 1
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC1Init(GENERAL_TIM, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(GENERAL_TIM, TIM_OCPreload_Enable);
// 输出比较通道 2
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC2Init(GENERAL_TIM, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(GENERAL_TIM, TIM_OCPreload_Enable);
// 输出比较通道 3
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC3Init(GENERAL_TIM, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(GENERAL_TIM, TIM_OCPreload_Enable);
// 输出比较通道 4
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC4Init(GENERAL_TIM, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(GENERAL_TIM, TIM_OCPreload_Enable);
// 使能计数器
TIM_Cmd(GENERAL_TIM, ENABLE);
}
void GENERAL_TIM_Init(void)
{
GENERAL_TIM_GPIO_Config();
GENERAL_TIM_Mode_Config();
}
//小车左转
void PWM_CarLeft(void){
TIM_SetCompare1(GENERAL_TIM,0);
TIM_SetCompare2(GENERAL_TIM,0);
TIM_SetCompare3(GENERAL_TIM,4000);
TIM_SetCompare4(GENERAL_TIM,4000);
}
//小车右转
void PWM_CarRight(void){
TIM_SetCompare1(GENERAL_TIM,4000);
TIM_SetCompare2(GENERAL_TIM,4000);
TIM_SetCompare3(GENERAL_TIM,0);
TIM_SetCompare4(GENERAL_TIM,0);
}
//小车最大速度
void PWM_CarMaxGo(void){
TIM_SetCompare1(GENERAL_TIM,0);
TIM_SetCompare2(GENERAL_TIM,0);
TIM_SetCompare3(GENERAL_TIM,0);
TIM_SetCompare4(GENERAL_TIM,0);
}
/*********************************************END OF FILE**********************/
- 小车转向的原理是跟坦克的一样,通过降低转向边的轮子速度来实现。而控制转速就要用到PWM波来减少或增多电机的通断时间(其实是驱动板的电机使能引脚)。
- 转向函数的封装
PS:完整的程序太多了,最好下载下来慢慢看。
蓝牙遥控器
做到这里就剩只蓝牙遥控器的配置了,软件呢随便哪个都行,只要能收发数据就行。
不过我推荐用我这个,因为长得好看。
下载地址,提取码:kvar。此软件为安卓,ios没有
- 查看指令
单片机复位的时候会通过蓝牙发送这些数据,用手机连上蓝牙然后复位单片机就可以看到了。
printf("-----指令-----\n
0x01:小车后退\n
0x02:小车向左\n
0x03:小车向右\n
0x04:小车前进\n
0x05:小车刹车\n
0x06:电机停止\n
0x07:小车逆时针\n
0x08:小车转向停止\n
0x09:小车顺时针\n");
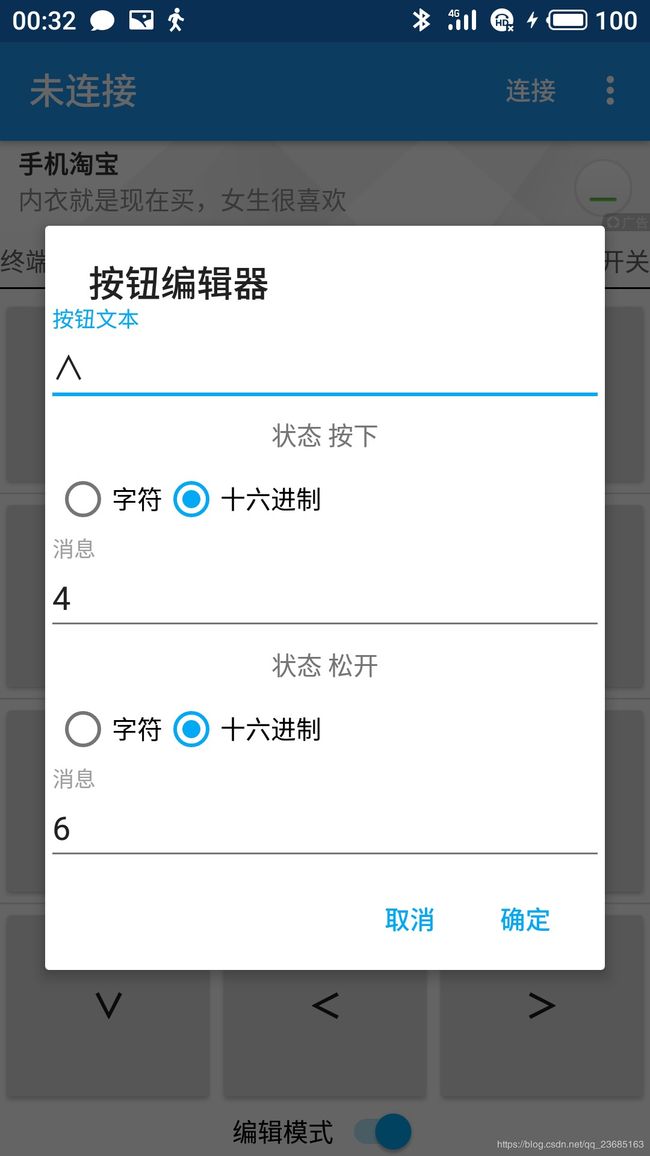
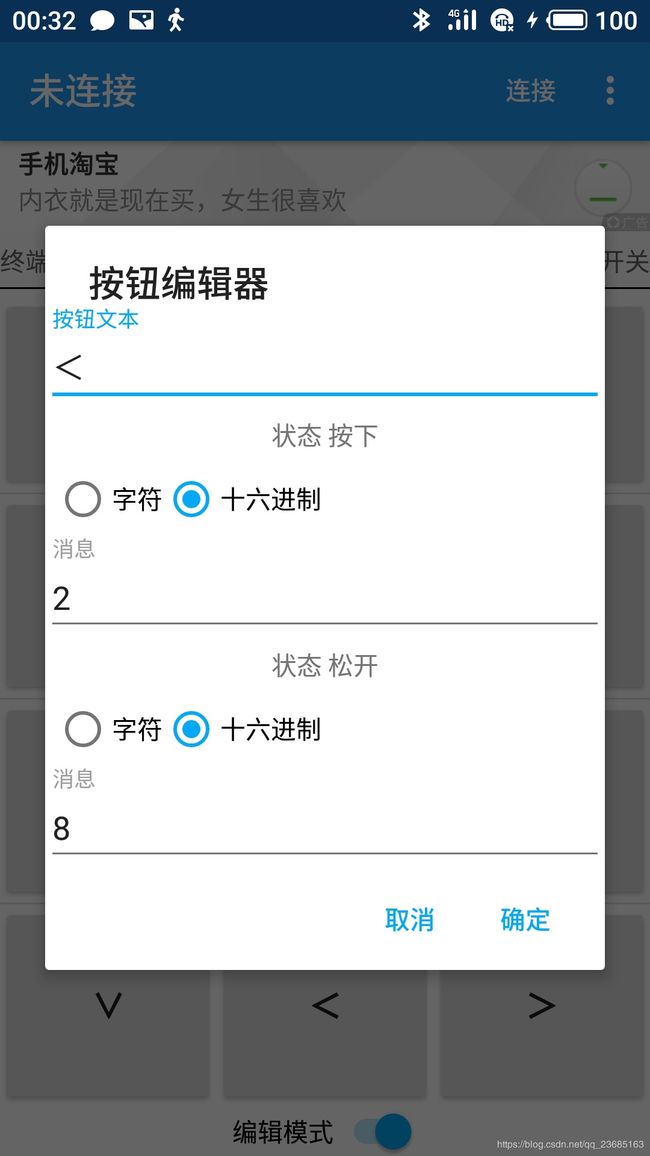
- 单片机就是通过这些十六进制的数据来控制小车的运动,只要将遥控器上的按键对应这些数据就行了。
- 按键说明
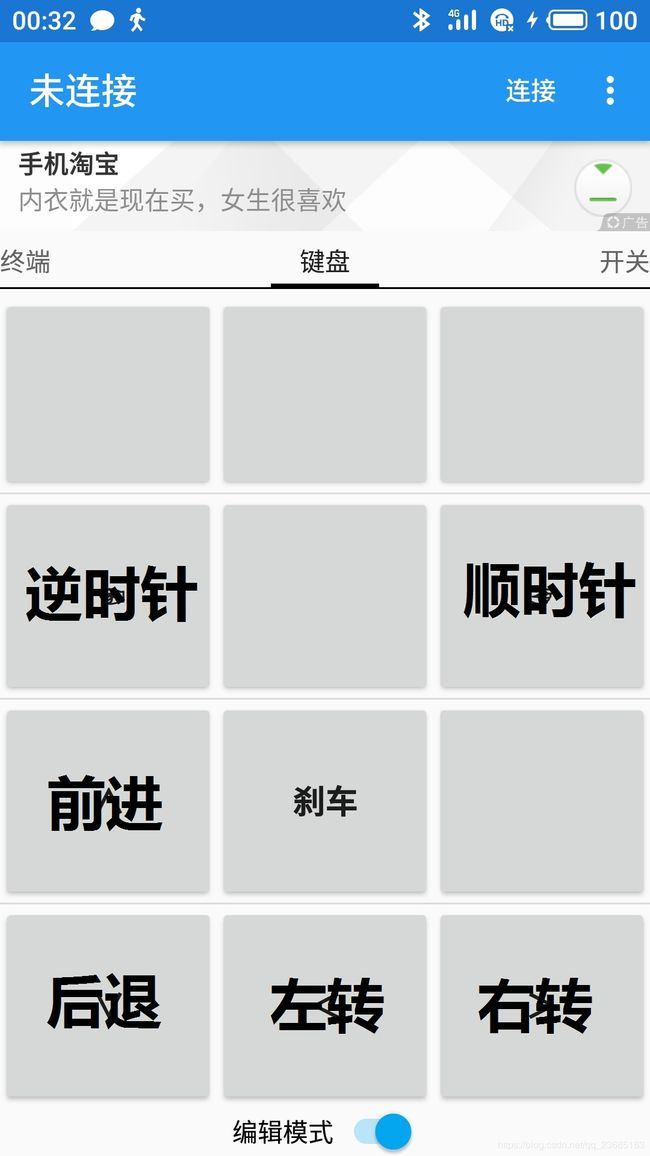
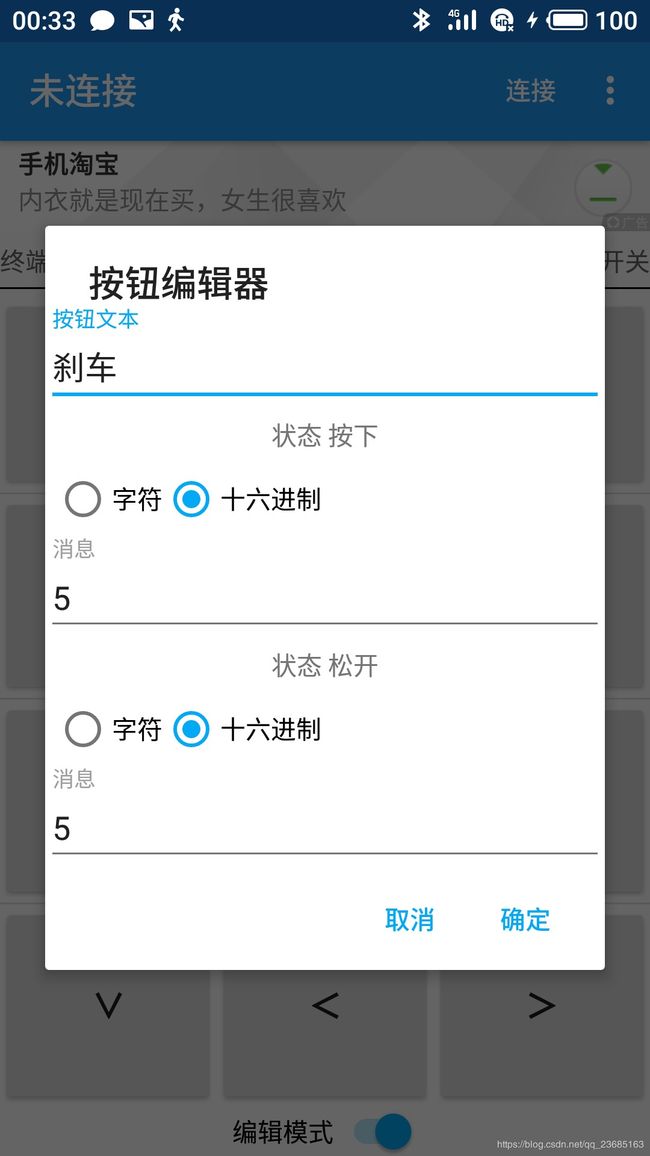
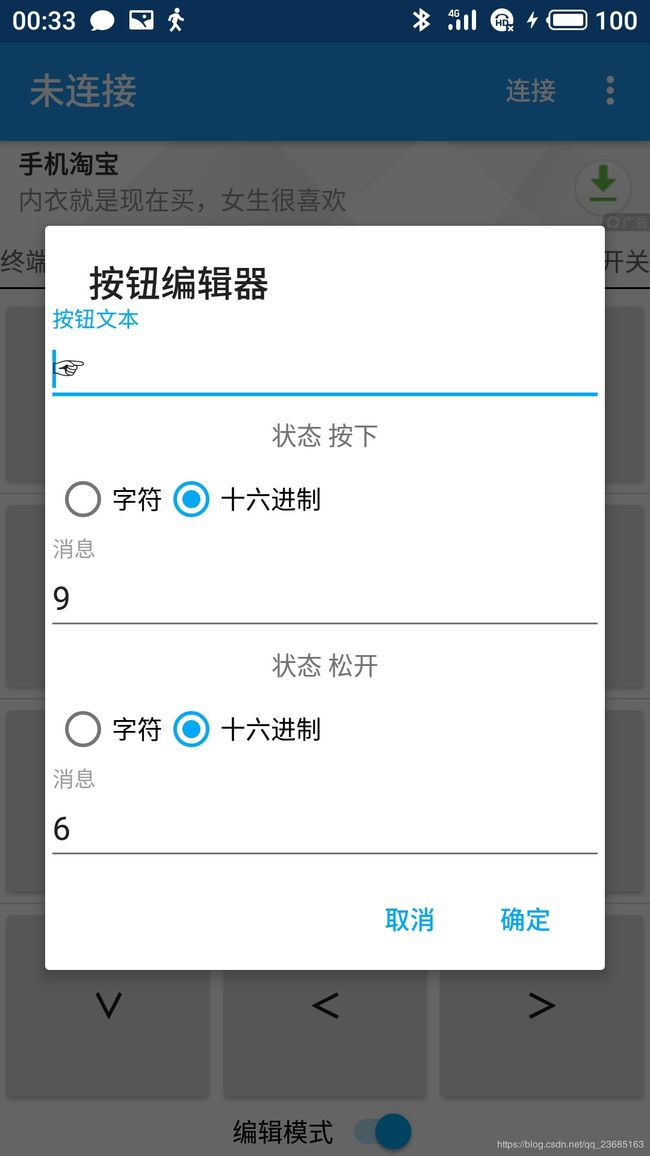
- 按键配置
按键配置简单,只要根据指令来配置就好了,我就举几个例子。
- 前进
- 左转
- 刹车
- 原地顺时针
 接下来可以开车上路了
接下来可以开车上路了
祝你好运!!!