STM32的UART读写及printf打印
0.摘要
本文以STM32F1x系列单片机为例,主要介绍了串口的初始化、串口中断、接收/发送、串口调试等内容,也顺带讲到中断分组、半主机模式以及微库MicroLIB。
1.串口初始化
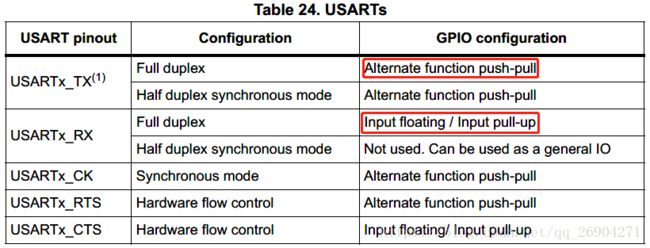
串口初始化主要包括对IO、USART和中断的初始化。根据STM32F1x手册RM0008的P166,USART在全双工模式下,发送口TX要配置成复用推挽输出,接收口RX要配置成浮空输入或上拉输入。此外,本文不使用USART的硬件流控制,所谓硬件流控制就是通过加入额外的引脚(RTS和CTS)来控制数据的收发过程,在数据传输之前确认收发双方均准备好才进行通信,用于防止接收缓冲区满而导致的数据丢失问题。
/*****************************************************
*function: 初始化串口1
*param: 串口波特率
*return:
******************************************************/
void USART1_Init(unsigned int BaudRate)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
/* TX - PA.9 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* RX - PA.10 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PA.10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = BaudRate; //波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长8位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位1位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收/发模式
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启接收中断
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE); //开启空闲中断
USART_Cmd(USART1, ENABLE);
}
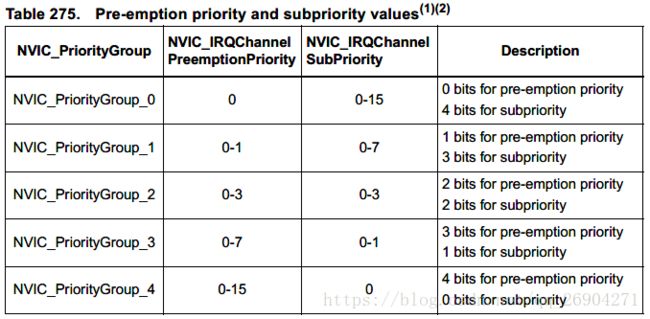
中断部分的配置较为简单,主要涉及中断分组的问题。在说中断分组之前,必须先了解中断优先级:STM32F1x的中断优先级分为抢占优先级(先优先级)和响应优先级(从优先级),不同抢占优先级的中断可相互打断(即相互嵌套)。抢占优先级相同的两个中断不可相互打断,先发生(中断)者先执行,如果同时发生(中断),则高响应优先级者先执行。这两个优先级在STM32F1x中通过寄存器的4个位来表示,究竟用多少个位表示抢占优先级,多少个位表示响应优先级呢?STM32F1x并没有定死,而是通过中断分组来让用户灵活分配。各中断分组定义如下图所示(截自UM0427的P228)。本文由于只使用了一个中断,因此选择任何一个分组的任何一个优先级都无所谓。
/*****************************************************
*function: 串口1中断配置
*param:
*return:
******************************************************/
void NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); //中断分组1:1位抢占优先级,3位响应优先级
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中断
NVIC_Init(&NVIC_InitStructure);
}
2.串口接收
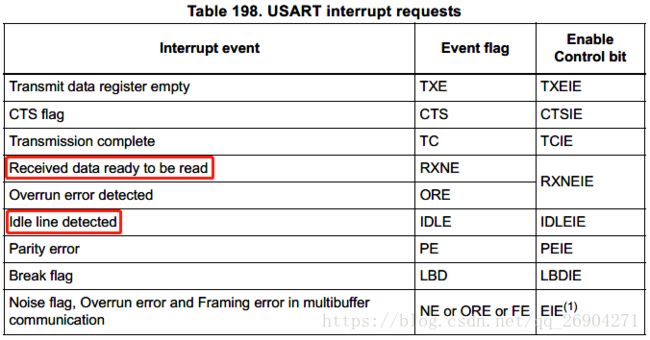
串口接收通过中断来实现,即当接收到数据时,产生中断,程序转去处理接收到的数据。接收数据用的中断包括接收中断(RXNE)和空闲中断(IDLE),如下图所示(截自RM0008的P821)。接收中断较好理解,就是每接收到一个字节的数据,就会产生中断。而空闲中断则是在接收完多个连续的字节(即一个数据帧)之后产生中断。
本文同时开启接收中断和空闲中断,串口每收到一个字节的数据,就进入接收中断,把它读取出来放好。当收完一帧数据时,就会进入空闲中断,把所接收的n个字节的数据打印出来(串口打印见下一小节)。由于同个USART的中断共用一个中断服务函数,故在函数中需要对中断源进行判断,再执行相应的操作。值得注意的是,每次进入中断都要读一下DR寄存器(Data Register),否则将不断地进入中断。
/*****************************************************
*function: 串口1中断服务函数,打印接收到的字节
*param:
*return:
******************************************************/
void USART1_IRQHandler(void)
{
static unsigned char buff[64];
static unsigned char n = 0;
unsigned char i;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //判断是否为接收中断
{
buff[n++] = USART1->DR; //读取接收到的字节数据
if(n == 64)
{
n = 0;
}
}
if(USART_GetITStatus(USART1, USART_IT_IDLE) != RESET) //判断是否为空闲中断
{
USART1->DR; //读DR,清标志
printf("%d characters:\r\n", n);
for(i=0; i
3.串口发送与printf打印
前面说的的DR寄存器是一个可读写寄存器(实际上是由两个寄存器组成),串口的发送和接收都要围着它转,收到的数据从它里面读,而发送的数据要往它里面扔。串口的发送操作非常简单,一条语句就能搞定,就是往DR寄存器写入要发送的数据:
USART1->DR = data;或者使用库函数:
USART_SendData(USART1, data);串口在嵌入式领域不仅是一个通讯接口,还是一种调试工具,其好用程度不亚于硬件仿真。学过C语言的朋友应该都知道标准库函数printf()和scanf(),前者用于打印信息到控制台上,后者实现从键盘读入字符到程序。Keil、IAR等集成开发环境均支持标准库函数,如果在单片机的程序里调用printf()打印内容,最终会在哪里显示呢?答案是不可知的,因为单片机没有控制台这种东西,但我们可以利用它的外设来实现printf(),比如LCD或串口(串口再接到电脑上显示打印信息)。串口基本上大多数单片机都有,而LCD就不一定了,所以我们通常用串口来打印内容。
那么只要是有串口的单片机,调用一下printf()就可以打印信息了吗?还没那么简单,单片机并不能猜透你的意图,你需要告诉它往哪里printf,通过下面的fputc()函数来实现。fputc()是printf()的底层函数,需要把它改装一番,让它把要打印的数据发送到串口上去。
/*****************************************************
*function: 写字符文件函数
*param1: 输出的字符
*param2: 文件指针
*return: 输出字符的ASCII码
******************************************************/
int fputc(int ch, FILE *f)
{
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET); //等待上次发送结束
USART_SendData(USART1, (unsigned char)ch); //发送数据到串口
return ch;
}除此之外,我们还要再做一点配置工作——禁用半主机模式,禁用了半主机模式才能使用标准库函数printf()打印信息到串口,在程序中加入以下代码即可。那么什么是半主机模式?为什么不用它?半主机模式是ARM单片机的一种调试机制,跟串口调试不一样的是,它需要通过仿真器来连接电脑和ARM单片机,并调用相应的指令来实现单片机向电脑显示器打印信息(或者从电脑键盘读取输入)。简而言之,这种方法比串口调试更复杂(需要进行更多的配置操作),也更不灵活(一定要用仿真器)。
/********** 禁用半主机模式 **********/
#pragma import(__use_no_semihosting)
struct __FILE
{
int a;
};
FILE __stdout;
void _sys_exit(int x)
{
}
上面的配置似乎有点麻烦,要加入这么一堆难懂的代码,难道没有更简便点的方法吗?有,但不推荐。方法是使用微库(MicroLIB),只要在Keil的“Options for Target -> Target ->Use MicroLIB”上打钩,即可使用串口打印(fputc()函数还是要改,但上述代码不用加)。微库是区别于C标准库的另一个库,当使用微库时,就默认关闭了半主机模式,也就不用添加上面的代码。这样虽然方便,但个人建议能不用就不用,原因:第一,微库是为小内存嵌入式设备而设计的,使用它可以减少代码所占空间,但对现在STM32等单片机来说,内存一般都够用,微库并非必需;第二,微库相对于C标准库而言,支持的功能更少,主要体现在对操作系统的支持上。总的来说,标准的东西总是相对更可靠,所以不必要的掉坑,还是用C标准库,不用微库。
4.最后
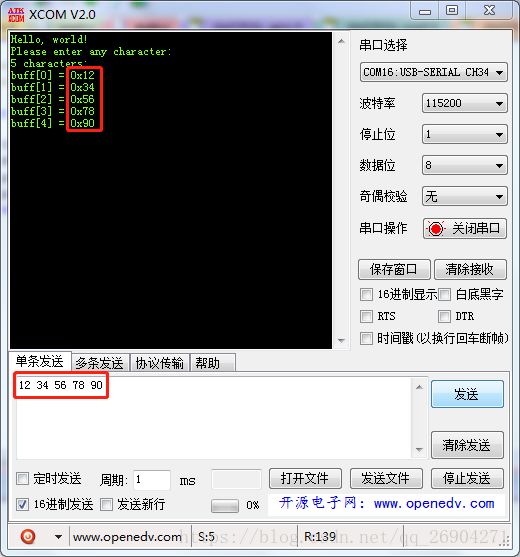
我们还需要一个USB转TTL模块和一台装有串口调试软件的电脑,就可以看到单片机打印到串口上的内容了。从此,如果我们想看某个变量的值,可以打印一下,想看程序跑到哪个地方,也可以打印一下,想让单片机向世界say个hello,还是可以打印一下。妈妈再也不用担心我的调试!
主函数:
int main()
{
USART1_Init(115200);
NVIC_Config();
printf("Hello, world!\r\n");
printf("Please enter any character:\r\n");
while(1);
}运行效果:
参考:
[1] RM0008 (STM32F1x用户手册)
[2] UM0427 (STM32F101x/STM32F103x固件库手册)
[3] Keil官方对半主机模式semihosting的介绍
[4] Keil官方对微库MicroLib的介绍