S5PV210开发 -- 串口驱动开发
如需转载请注明出处:https://blog.csdn.net/qq_29350001/article/details/78579074
上篇文章讲的 UART,更多的是硬件相关的知识。接下来进入正题了,串口驱动开发。
一、阅读原理图
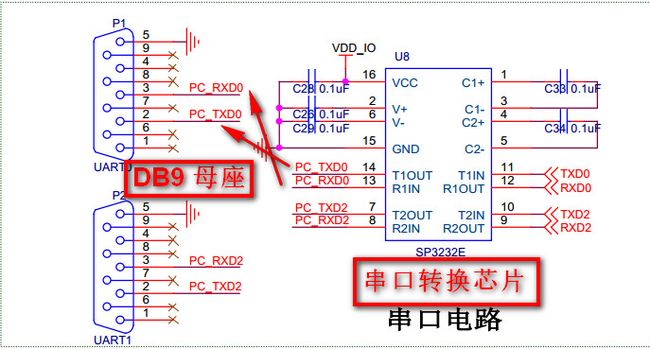
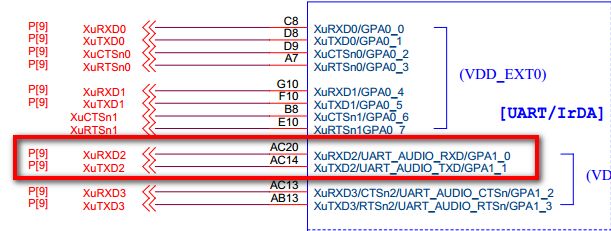
我们用的是 UART2 串口,则接收管脚 XuRXD2 复用 GPA1_0,发送管脚 XuTXD2 复用 GPA1_1
二、S5PV210 UART
(1)通用异步接收器和发送器的概述 (p-853)
S5PV210中的通用异步接收器和发送器(UART)提供四个独立的异步和串行输入/输出(I / O)端口。所有端口都以基于中断或基于DMA的方式运行模式。 UART产生一个中断或DMA请求来传送数据到CPU和UART。
UART支持高达3Mbps的比特率。每个UART通道包含两个FIFO来接收和传输数据:
ch0中的256个字节,ch1中的64个字节以及ch2和ch3中的16个字节。
UART包括可编程波特率,红外(IR)发送器/接收器,一个或两个停止位插入,5位,6位,7位或8位数据宽度和奇偶校验。每个UART包含一个波特率发生器,一个发送器,一个接收器和一个控制单元,如图1-1所示。
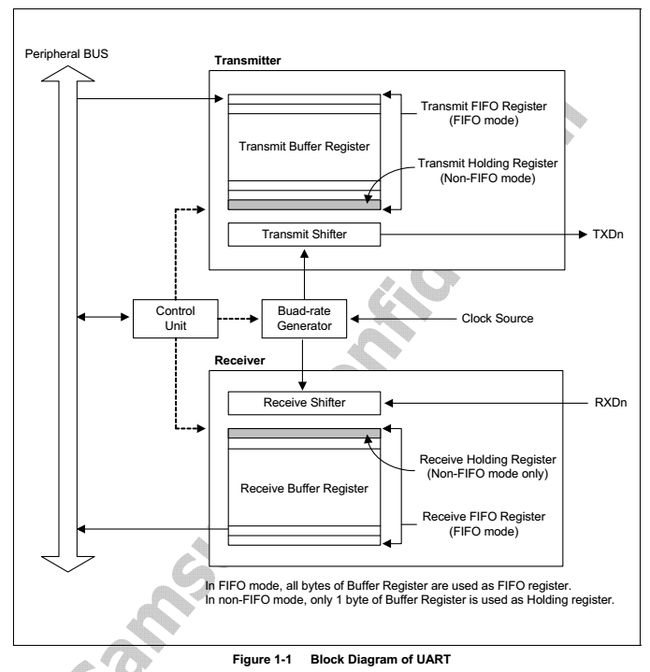
波特率发生器使用PCLK或SCLK_UART。发送器和接收器包含FIFO和数据移。要发送的数据被写入Tx FIFO,并被复制到发送移位器。数据是由发送数据引脚(TxDn)移出。接收到的数据从接收数据引脚(RxDn)移位,从移位器复制到Rx FIFO。
(2)通用异步接收器和发送器的关键特性
基于DMA或基于中断的操作的RxD0,TxD0,RxD1,TxD1,RxD2,TxD2,RxD3和TxD3
带有IrDA 1.0的UART Ch 0,1,2和3
具有256字节FIFO的UART Ch 0,具有64字节FIFO的Ch 1,具有16字节FIFO的Ch2和3
用于自动流量控制的UART Ch 0,1和2与nRTS0,nCTS0,nRTS1,nCTS1,nCTS2和nRTS2
支持握手发送/接收。
(3)UART描述
以下各节将介绍UART操作,如数据传输,数据接收,中断生成,波特率生成,环回模式,红外模式和自动流量控制。
《1》数据发送
传输的数据帧是可编程的。 它由一个起始位,五到八个数据位,一个可选的奇偶校验组成位和由行控制寄存器(ULCONn)指定的一到两个停止位。 变送器也可以产生一个强制串行输出为逻辑0状态一个帧传输时间的中断条件。 这个块传送当前发送字之后的中断信号被完全发送。 中断信号后传输时,发送器不断向Tx FIFO发送数据(Tx保持寄存器,如果是非FIFO模式)
《2》数据接收
与数据发送类似,用于接收的数据帧也是可编程的。 它由一个5位的起始位组成8个数据位,一个可选的奇偶校验位以及线路控制寄存器(ULCONn)中的一到两个停止位。 收件人检测溢出错误,奇偶校验错误,帧错误和中断情况,每个错误标志都会设置一个错误标志。
溢出错误(Overrun error)表示新数据在旧数据读取之前覆盖旧数据。
奇偶校验错误(Parity error)表示接收器检测到意外的奇偶校验条件。
帧错误(Frame error)表示接收到的数据没有有效的停止位。
中断条件(Break condition)表示RxDn输入保持逻辑0状态,以进行多个帧传输时间。
如果在3个字的时间内没有收到任何数据,则会发生接收超时情况(此时间间隔符合设置字长度位),FIFO模式下Rx FIFO不为空。
后面内容有点多... 就不一一翻译了。想了解更多,自己看。
三、UART 相关配置
(1)配置串口管脚
上面提到了,S5PV210 中的通用异步接收器和发送器(UART)提供四个独立的异步和串行输入/输出(I / O)端口。根据原理图可以看出,我们用的是 UART2 串口,则接收管脚 XuRXD2 复用 GPA1_0,发送管脚 XuTXD2 复用 GPA1_1
查看GPA1寄存器(p-135)
端口组GPA1控制寄存器有六个控制寄存器,分别是GPA1CON,GPA1DAT,GPA1PUD,GPA1DRV,GPA1CONPDN和端口组GPA1控制寄存器中的GPA1PUDPDN。
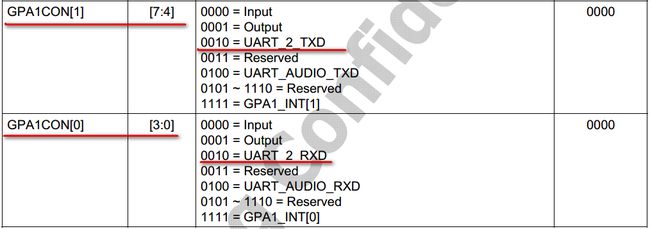
《1》GPA1CON 寄存器 (配置寄存器) 将其配置成UART2收/发模式
GPA1CON, R/W, Address = 0xE020_0020
GPA1CON[1] [7:4] 0100 = UART_AUDIO_TXD
GPA1CON[0] [3:0] 0100 = UART_AUDIO_RXD
设置:
GPA1CON 地址为 0xE020_0020,然后要将 GPA1CON[7:0] 进行位操作,使其变为0010 0010,即UART2收发模式。
位操作方法,参看:C语言再学习 -- 位操作
GPA1CON &= ~(0xff<<0); //清空bit 0-7
GPA1CON |= 0x22; //设置 0010 0010 接受 发送
《2》GPA1PUD 寄存器(上下拉电阻控制寄存器 )
GPA1PUD, R/W, Address = 0xE020_0028
GPA1PUD[n] [2n+1:2n] 00 = Pull-up/ down disabled

设置:
GPA1PUD 地址为 0xE020_0028,我们不需要上下拉,因此:
GPA1PUD [1:0] 00 = Pull-up/ down disabled
GPA1PUD [3:2] 00 = Pull-up/ down disabled
位操作方法:
GPA1PUD &= ~(0x0f<<0);//0000 禁止上拉下拉
(2)配置串口寄存器
在 p-864 有一个 REGISTER MAP,可以看一下。太长了只粘贴一部分。
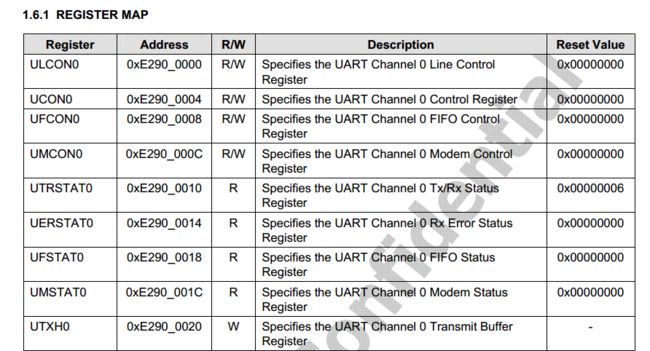
S5PV10 UART 相关寄存器有如下几个,下面我们会一一讲解的:
《1》UART 行控制器 ULCONn
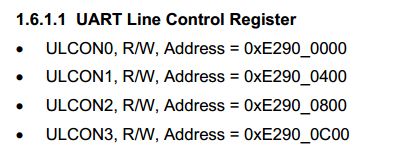
UART模块中有四个UART行控制寄存器,分别是ULCON0,ULCON1,ULCON2和ULCON3
我们用的是 UART2,所以使用
ULCON2, R/W, Address = 0xE290_0800

设置:
ULCON2 地址为 0xE290_0800
数据位宽度为 8bit,停止位 1位,无校验位,正常模式。
即设置数据格式寄存器 ULCON2 = 000 0011 = 0x03
位操作方法:
ULCON2 = 0x03;
《2》UART 模式控制寄存器 UCONn
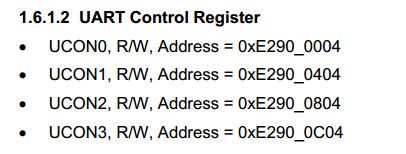
UART模块中有四个UART控制寄存器,分别是UCON0,UCON1,UCON2和UCON3
我们用的是 UART2,所以使用
UCON2, R/W, Address = 0xE290_0804

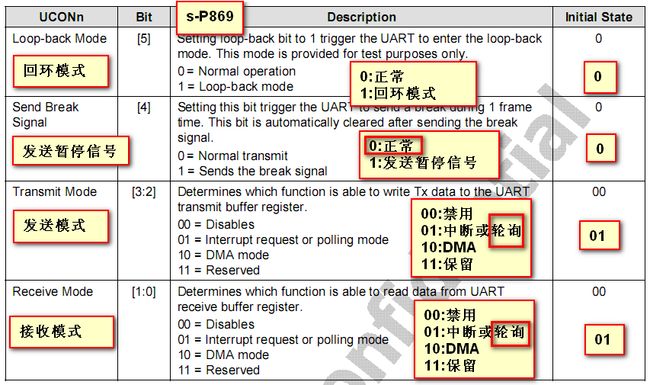
设置:
UCON2 地址为 0xE290_0804
接收模式选择轮询,发送模式也选择轮询,正常发送暂停信号,回环模式为正常,时钟源选择 PCLK
即模式控制寄存器 UCON2 = 00 0101 = 0x05;
位操作方法:
UCON2 = 0x05;
需要知道的小知识点:
在收发模式里有中断、轮询、DMA这些有什么区别呢?
参看:后续补充!!
再者,时钟源选择里有 PCLK、SCLK_UART 这又是什么呢?
参看:后续补充!!
《3》UART FIFO 控制寄存器UFCONn

UART模块中有四个UART FIFO控制寄存器,分别是UFCON0,UFCON1,UFCON2和UFCON3
我们用的是 UART2,所以使用
UFCON2, R/W, Address = 0xE290_0808
![]()
设置:
UFCON2 地址为 0xE290_0808
禁止 FIFO,即FIFO 控制寄存器 UFCON2 = 0x00;
位操作方法:
UFC0N2 = 0X00;
《4》UART 收/发 状态寄存器 UTRSTATn

UART模块中有四个UART Tx / Rx状态寄存器,分别是UTRSTAT0,UTRSTAT1,UTRSTAT2和UTRSTAT3
我们用的是 UART2,所以使用
UTRSTAT2, R, Address = 0xE290_0810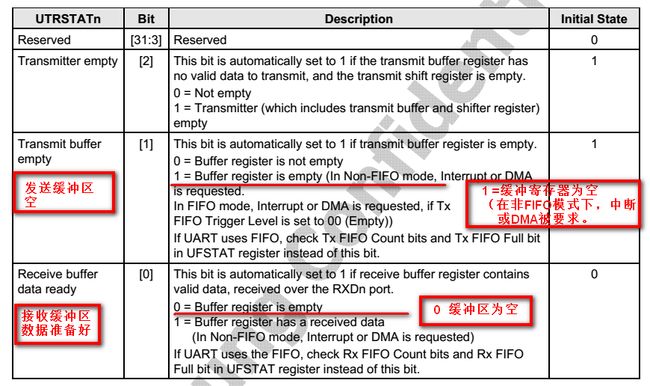
设置:
UTRSTAT2 地址为 0xE290_0810
接收缓冲区数据准备好,缓冲区为空;发送缓冲区寄存器为空。即 UTRSTAT2 = 10 = 0x02;
只有收发缓冲区为空,才能进行收发。所以首先要先判断 UART 收/发 状态寄存器 UTRSTATn
位操作方法:
UTRSTAT2 = 0x02;
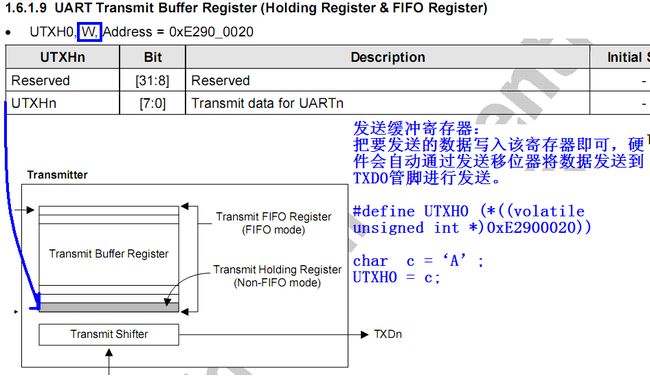
《5》UART 发送缓冲寄存器(保持寄存器和FIFO寄存器)UTXHn

UART模块有四个UART发送缓冲寄存器,分别是UTXH0,UTXH1,UTXH2和UTXH3。
UTXHn包含传输数据的8位数据。
我们用的是 UART2,所以使用
UTXH2, W, Address = 0xE290_0820

设置:
UTXH2 地址为 0xE290_0820
比如发送的数据:55,则 UTXH2 = 0101 0101 = 0x55;
发送移位器:发送缓冲寄存器中的数据并不是直接传送到输出管脚TXD2(GPA1_1),还必须先送到发送移位器(Transmit shifter),然后再由Transmit shifter通过移位操作,将数据一位一位的发送到TXD2管脚上。
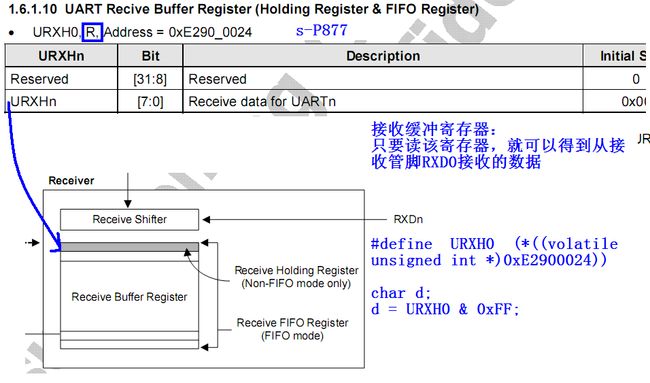
《6》UART接收缓冲寄存器(保持寄存器和FIFO寄存器)URXHn

UART模块中有四个UART接收缓冲寄存器,分别是URXH0,URXH1,URXH2和URXH3。
URXHn包含接收数据的8位数据。
我们用的是 UART2,所以使用
URXH2, R, Address = 0xE290_0824

设置:
URXH2 地址为 0xE290_0824
比如接收到的数据:55,则 URXH2 = 0101 0101 = 0x55;
接收移位器:从接收管脚RXD2上接收来的数据并不是直接放到接收缓冲寄存器,而是先一位一位的放到接收移位器中,当收满一个字节后,再放到接收缓冲寄存器中。
《7》UART 通道波特率分频寄存器 UBRDIVn
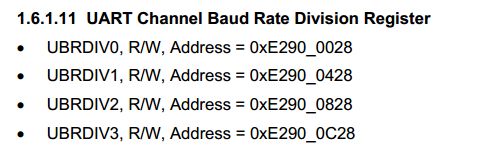
UART模块中有四个UART通道波特率分频寄存器,分别是UBRDIV0,UBRDIV1,UBRDIV2和UBRDIV3。
我们用的是 UART2,所以使用
UBRDIV2, R/W, Address = 0xE290_0828

注意:当UART时钟源是PCLK时,UBRDIVn必须大于比0(UBRDIVn> 0),如果UBRDIV的值为0,则UART波特率不受UDIVSLOT值的影响。
设置:
UBRDIV2 地址为 0xE290_0828
《8》UART通道分割插槽寄存器 UDIVSLOTn

UART模块中有四个UART通道波特率分频寄存器,分别是UDIVSLOT0,UDIVSLOT1,UDIVSLOT2和UDIVSLOT3。
我们用的是 UART2,所以使用
UDIVSLOT2, R/W, Address = 0xE290_082C

================================================
需要知道的小知识点:
波特率,在UART里面是一个很重要的概念。
参看:串口通信 -- 百度百科
数据传输率
数据传输率是指单位时间内传输的信息量,可用比特率和波特率来表示。
⑴比特率:比特率是指每秒传输的二进制位数,用bps(bit/s)表示。
⑵波特率:波特率是指每秒传输的符号数,若每个符号所含的信息量为1比特,则波特率等于比特率。在计算机中,一个符号的含义为高低电平,它们分别代表逻辑“1”和逻辑“0”,所以每个符号所含的信息量刚好为1比特,因此在计算机通信中,常将比特率称为波特率,即:
1波特(B)= 1比特(bit)= 1位/秒(1bps) 例如:电传打字机最快传输率为每秒10个字符/秒,每个字符包含11个二进制位,则数据传输率为:10Baud。11位/字符×10个字符/秒=110位/秒=110bps。计算机中常用的波特率是:110、300、600、1200、2400、4800、9600、19200、28800、33600,目前最高可达56Kbps.
⑶位时间Td
位时间是指传送一个二进制位所需时间,用Td 表示。Td = 1/波特率 = 1/B
例如:B=110波特/秒 , 则Td = 1/110 ≈ 0.0091s
发送时钟和接收时钟
在串行通信中,二进制数据以数字信号的信号形式出现,不论是发送还是接收,都必须有时钟信号对传送的数据进行定位。在TTL标准表示的二进制数中,传输线上高电平表示二进制1,低电平表示二进制0,且每一位持续时间是固定的,由发送时钟和接收时钟的频率决定。
⑴ 发送时钟
发送数据时,先将要发送的数据送入移位寄存器,然后在发送时钟的控制下,将该并行数据逐位移位输出。通常是在发送时钟的下降沿将移位寄存器中的数据串行输出,每个数据位的时间间隔由发送时钟的周期来划分。
⑵ 接收时钟
在接收串行数据时,接收时钟的上升沿对接收数据采样,进行数据位检测,并将其移入接收器的移位寄存器中,最后组成并行数据输出。
⑶ 波特率因子
接收时钟和发送时钟与波特率有如下关系:F = n × B 这里F 是发送时钟或接收时钟的频率; B 是数据传输的波特率; n 称为波特率因子。设发送或接收时钟的周期为Tc,频率为F的位传输时间为Td,则: Tc = 1/F , Td = 1/B 得到: Tc = Td /n 在实际串行通信中,波特率因子可以设定。在异步传送时,n = 1,16,64,实际常采用n = 16,即发送或接收时钟的频率要比数据传送的波特率高n倍。在同步通信时,波特率因子n必须等于1。
================================================
UART波特率配置:
UART模块中有四个UART波特率除数寄存器,分别是UBRDIV0,UBRDIV1,UBRDIV2和UBRDIV3。
存储在波特率除数寄存器(UBRDIVn)中的值:
DIV_VAL = UBRDIVn + (num of 1's in UDIVSLOTn)/16
PLCK:DIV_VAL = (PCLK / (bps x 16))
或者
SLCK_UART:DIV_VAL = (SCLK_UART / (bps x 16))
简单来说:
内部系统时钟源 PCLK
外部时钟源 SCLK_UART
其中,除数应该是从1到(216-1)。
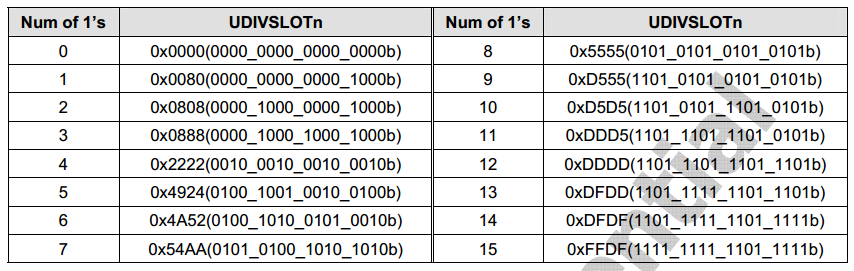
使用 UDIVSLOT,可以更准确地生成波特率。
例如,如果波特率是 115200 bps,SCLK_UART 是 40 MHz,则 UBRDIVn 和 UDIVSLOTn 是:
DIV_VAL = (40000000 / (115200 x 16)) -1
= 21.7 -1
= 20.7
UBRDIVn = 20(DIV_VAL的整数部分)
(UDIVSLOTn中1的个数)/ 16 = 0.7 (21.7 小数点后为 0.7)
那么(UDIVSLOTn中的1的个数)= 11 (取整数部分)
所以,UDIVSLOTn 可以是16'b 1110_1110_1110_1010或 16'b 0111_0111_0111_0101 等
建议按照下表所述选择UDIVSLOTn,即 UDIVSLOTn = 0xDDD5
回到我们自己的开发板上来:
我们在 《2》UART 模式控制寄存器 UCONn 中有提到 PCLK、SCLK_UART,其中的我们选择的是 PCLK。
PCLK:DIV_VAL1) = (PCLK / (bps x 16) )
=============================================
其中 PCLK 的值是怎么得到的呢?
查看芯片手册 CLOCK DOMAINS (p-353)
S5PV210由三个时钟域组成,即主系统(MSYS),显示系统(DSYS)和外设系统(PSYS),如图3-1所示。
•MSYS域包括Cortex A8处理器,DRAM内存控制器(DMC0和DMC1),3D内部SRAM(IRAM和IROM),INTC和配置接口(SPERI)。 Cortex A8仅支持同步模式,因此它必须与200MHz AXI总线同步运行。
•DSYS域包含显示相关模块,包括FIMC,FIMD,JPEG和多媒体IP(所有其他模块)在X,L和T块中提到的IP),如图3-1所示。
•PSYS域用于安全性,I / O外围设备和低功耗音频播放。
•每个总线系统分别工作在200 MHz(最大),166 MHz和133 MHz。 有异步总线桥(BRG)在两个不同的域之间。


在这里,得出 PCLK_PSYS 为 66 MHz。
=============================================
如果波特率是 115200 bps,PCLK 是 66 MHz,则 UBRDIV2 和 UDIVSLOT2 是:
DIV_VAL = (66000000 / (115200 x 16)) -1
= 35.8 -1
= 34
UBRDIV2 = 34(DIV_VAL的整数部分)
(UDIVSLOTn中1的个数)/ 16 = 0.8 (35.8 小数点后为 0.8)
那么(UDIVSLOTn中的1的个数)= 13 (四舍五入)
按照上表所述选择UDIVSLOT2,即 UDIVSLOT2 = 0xDFDD
(3)总结
《1》GPA1CON 寄存器 (配置寄存器) 将其配置成UART2收/发模式
GPA1CON 地址为 0xE020_0020
GPA1CON &= ~(0xff<<0); //清空bit 0-7
GPA1CON |= 0x22; //设置 0010 0010 接受 发送
《2》GPA1PUD 寄存器(上下拉电阻控制寄存器 )
GPA1PUD 地址为 0xE020_0028
GPA1PUD &= ~(0x0f<<0); //0000 禁止上拉下拉
《3》UART 行控制器 ULCONn (数据位宽度为 8bit,停止位 1位,无校验位,正常模式)
ULCON2 地址为 0xE290_0800
ULCON2 = 0x03;
《4》UART 模式控制寄存器 UCONn(接收/发送模式选择轮询,正常发送暂停信号,回环模式为正常,时钟源选择 PCLK)
UCON2 地址为 0xE290_0804
UCON2 = 0x05;
《5》UART FIFO 控制寄存器UFCONn(禁止 FIFO)
UFCON2 地址为 0xE290_0808
UFC0N2 = 0X00;
《6》UART 收/发 状态寄存器 UTRSTATn(接收缓冲区数据准备好,缓冲区为空;发送缓冲区寄存器为空)
UTRSTAT2 地址为 0xE290_0810
UTRSTAT2 = 0x02;
《7》UART 发送缓冲寄存器(保持寄存器和FIFO寄存器)UTXHn
UTXH2 地址为 0xE290_0820
char c = 'A';
UTXH2 = C;
《8》UART接收缓冲寄存器(保持寄存器和FIFO寄存器)URXHn
URXH2 地址为 0xE290_0824
char d;
d = URXH2 & 0xFF;
《9》UART 通道波特率分频寄存器 UBRDIVn(设置波特率为 115200)
UBRDIV2 地址为 0xE290_0828
UBRDIV2 = 34;
《10》UART通道分割插槽寄存器 UDIVSLOTn
UDIVSLOT2 地址为 0xE290_082C
UDIVSLOT2 = 0xDFDD;
四、编写驱动程序
此处用到关键字 volatile,参看:C语言再学习 -- 关键字volatile
和预处理器 #define,参看:C语言再学习 -- C 预处理器
对比:S5PV210开发 -- GPIO
(1)头文件 uart.h
#ifndef __UART_H__
#define __UART_H__
#define GPA1CON *((volatile unsigned int *)0xE0200020)
#define GPA1PUD *((volatile unsigned int *)0xE0200028)
#define ULCON2 *((volatile unsigned int *)0xE2900800)
#define UCON2 *((volatile unsigned int *)0xE2900804)
#define UFCON2 *((volatile unsigned int *)0xE2900808)
#define UTRSTAT2 *((volatile unsigned int *)0xE2900810)
#define UTXH2 *((volatile unsigned int *)0xE2900820)
#define URXH2 *((volatile unsigned int *)0xE2900824)
#define UBRDIV2 *((volatile unsigned int *)0xE2900828)
#define UDIVSLOT2 *((volatile unsigned int *)0xE290082C)
#define PCLK 66000000//66MHz
extern void uart0_init(void);
extern void uart_test(void);
extern void uart_putc(char );
extern void uart_puts(char *);
extern char uart_getc(void);
extern void uart_gets(char *, int);
#endif
(2)uart.c
#include "uart.h"
void uart2_init(void)
{
/*配置GPA1_0 GPA1_1管脚为uart功能*/
//配置串口管脚
GPA1CON &= ~(0xff<<0);
GPA1CON |= 0x22;
//禁止两个管脚内部上拉下拉电阻
GPA1PUD &= ~(0x0f<<0);
//配置串口寄存器
/*8N1 115200 轮询*/
ULCON2 = 0x03;
UCON2 = 0x05;
UFCON2 = 0x00;
UBRDIV2 = PCLK/(115200*16) - 1;
/*reference P879*/
UDIVSLOT2 = 0xDFDD;
}
void uart_putc(char c)
{
/*判断UTXH2中是否为空
* UTRSTAT2 bit2 1,空
0,非空
*/
while(!(UTRSTAT2 & 0x02)) ;
UTXH2 = c;
if(c == '\n')
{
uart_putc('\r');
}
}
void uart_puts(char *s)
{
while(*s)
{
uart_putc(*s);
s++;
}
}
void uart_test(void)
{
/*输出数据到PC*/
uart_puts("\n helloworld! \n");
}
char uart_getc(void)
{
/*
* UTRSTAT2 bit0 1,代表接收到数据
* 0,没有接收到数据
* */
while(!(UTRSTAT2 & 0x01));
return (char)(URXH2&0xff);
}
void uart_gets(char *buf, int max)
{
int i = 0;
char tmp = 0;
while(i < (max-1))
{
tmp = uart_getc();
/*回显*/
uart_putc(tmp);
buf[i] = tmp;
if(tmp == '\r')
{
break;
}
i++;
}
/*"abc\r" "abc\0"*/
buf[i] = '\0';
}(3)main.c
#include "uart.h"
#define CMD_MAX_LEN 32
char cmd[CMD_MAX_LEN];
int main()
{
/*8n1 115200 轮询模式*/
uart2_init();
while(1)
{
/*发送命令提示符*/
uart_puts("\narmshell##");
/*接收PC机端的输入*/
uart_gets(cmd, CMD_MAX_LEN);
/*执行用户命令*/
}
return 0;
}(4)Makefile
NAME=uart
BIN=$(NAME).bin
OBJ=main.o uart.o
ELF=$(NAME).elf
CFLAGS=-nostdlib
LDFLAGS=-nostdlib -nostartfiles
$(BIN):$(ELF)
arm-none-linux-gnueabi-objcopy -O binary $(ELF) $(BIN)
$(ELF):$(OBJ)
arm-none-linux-gnueabi-ld $(LDFLAGS) -T uart.lds $(OBJ) -o $(ELF)
%.o:%.c
arm-none-linux-gnueabi-gcc $(CFLAGS) -c $< -o $@
clean:
rm -f $(OBJ) $(ELF) $(BIN)(5)uart.lds
ENTRY(main)
SECTIONS
{
. = 0xc0008000;
.text :
{
main.o(.text)
*(.text)
}
.data :
{
*(.data)
}
.bss :
{
*(.bss)
}
}五、编译下载到开发板并执行
使用 tftp 将 uart.bin下载到 SDRAM 的 0xc0008000 位置
tftp c0008000 uart.bin
go c0008000

OK,此时可以回显 armshell##,输入32bit字符回车。
六、问题分析
不知道有没有人发现寄存器配置是有问题的。哪里有问题呢?
。
。
。
。
答案是:波特率
这里的UART很明显是RS232通信。其最大传输速率为20Kbps。
因此波特率怎么用的是 115200bps呢?应该为 9600bps才对吧?
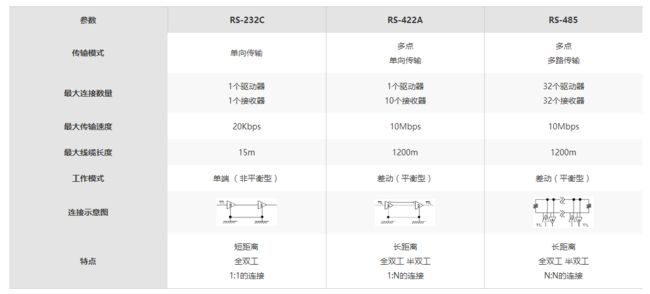
然后网上有看到这样一句话:
RS232协议并未规定最大传输速率,而是规定“速率低于20kb/s时,传输距离可以到15m”。随着距离减小,这个速率可以提高。RS232中一个波特包括一个bit。所以波特率与比特率相等。而随着现在电子科技发展,芯片驱动接受能力增强。这个速率也在提高,现在PC机都到921600了。不要为“最大传输速率”的定义纠结。 协议并未规定最大传输速率,而是规定“速率低于20kb/s时,传输距离可以到15m”。随着距离减小,这个速率可以提高。RS232中一个波特包括一个bit。所以波特率与比特率相等。而随着现在电子科技发展,芯片驱动接受能力增强。这个速率也在提高,现在PC机都到921600了。不要为“最大传输速率”的定义纠结。
我还是不甘心,继续查维基百科:
目前的最新版本是由美国电信工业协会(TIA, Telecommunications Industry Association,由EIA所分出的一个组织)所发行的TIA-232-F,它同时也是美国国家标准ANSI/TIA-232-F-1997(R2002),此标准于2002年受到再确认。在 1997年由TIA/EIA发行当时的编号则是TIA/EIA-232-F与ANSI/TIA/EIA-232-F-1997。在此之前的版本是TIA/EIA-232-E。[1]
最新标准是 TIA-232-F,谷歌这个标准:
参看:Interface Circuits for TIA/EIA-232-F
阅读翻译 TIA/EIA-232-F Electrical Specification 这部分内容:
所有的232电路传送电压信号,而连接器引脚处的电压不是超过±25 V.所有的引脚必须能够承受任何其他引脚的短路
而不会遭受永久性的损害。每一行应该有一个最小负载3kΩ,最大负载7kΩ,通常是接收器电路的一部分。
逻辑0由5V和15V之间的驱动电压和逻辑1表示在-5V和-15V之间。在接收端,电压在3V和15V之间代表0和在-3V和-15V之间的电压代表1。电压在±3V之间是不确定的,位于过渡区域。这有效地给了接收器的最小2 V噪声容限。
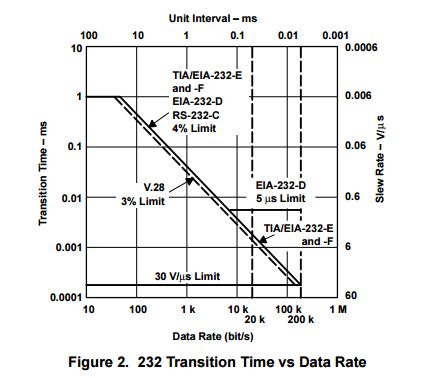
最初的电缆长度在RS-232-C中定义为15米;然而,这已经在EIA-232-D和TIA / EIA-232-E中进行了修改,现在已经进行了修改更正确地指定为2500 pF的最大容性负载。这等同于到约15到20米的线路长度,取决于电缆电容。如前所述,232指定了信号的最大转换速率驱动器输出为30 V /μs。这个限制与问题多与导线电缆中导体之间的串扰有关。越快越好过渡边缘,串扰量越大。这个限制,连同司机和接收机使用一个共同的信号地和事实由地电流引入的相关噪声严重限制了最大值数据吞吐量。为此,232标准规定了20 kbit / s的最大数据速率。该标准还规定了单位间隔与上升时间之间的关系通过过渡区(3 V到-3 V)或tt。这是主要的区别D和E修订版。图2 中更清楚地显示了这一点。EIA-232-D和数据速率高达8 kbit / s,规定了转换时间与单位间隔或比特时间tb为最大数据速率的4%。在8 kbit / s以上,转换时间放宽到最大5μs,与数据速率无关。都C和E修订版将tt / tb的比率指定为4%,一直到20 kbit / s。
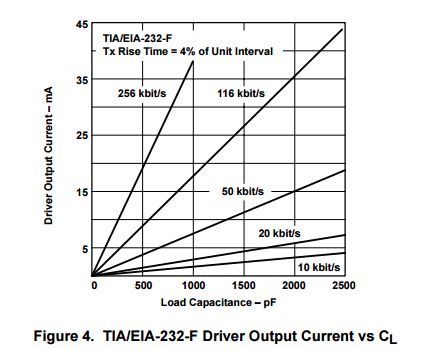
可以用4%的数字进一步推断这一点。最大转换率为30 V /μs,最大可达数据速率为200 kbit / s; 然而,在实践中,
这被限制在120kbit / s左右。一些软件程序运行在传输速率为116 kbit / s。此外,在更长的线路长度,最大线路驱动器的驱动电流成为影响数据速率的主要特征,取代了30-V /μs的压摆率。随着线路长度的增加,负载电容也增加,需要更多的电流保持不变过渡时间。
图4中显示的曲线表示维持电源所需的驱动电流4%的关系在不同的数据速率。在当今的低功耗系统中,这个水平的输出电流在大约20kbit / s以上是不可持续的。在实践中,对于更高的数据速率,线路长度通常限制在3米左右。大多驱动可以在这条线路上处理更高的传输速率严重影响电力供应。还显示了 256kbit / s 的曲线数据速率超过了30V /μs的限制。如前所述,需要高数据速率(> 200 kbit / s)在整个行业中广泛流行。
计算最大线路长度
到目前为止,已经讨论了负载电容方面的线路长度。 为了实际目的,我们不能考虑把这个负载电容的值变成真实的线路长度。 该标准规定最大线路电容为2500 pF。该对于20pF的接收机,输入电容将2480pF作为最大线路
电容。
接下来,必须考虑使用的电缆类型。 标准232电缆由多家厂商提供有互电容的每米大约100 pF,但必须增加杂散电容。 流浪电容变化很大,取决于线是否是屏蔽。对于屏蔽电缆,杂散电容通常是互电容的两倍。如图5所示,对于屏蔽电缆,最大线路长度为20米;对于非屏蔽电缆,它是40多米。

这么看来,短距离情况下,RS232使用115200波特率也是可以的。
如需转载请注明出处:https://blog.csdn.net/qq_29350001/article/details/78579074
