相机标定(4) 矫正畸变 undistort()和initUndistortRectifyMap()
从摄像机成像畸变的产生于是其“天生”的,不可避免的,这主要是由于透镜成像原理导致的。其畸变的原理可以参考相机模型)。它的畸变按照原理可以分解为切向畸变和径向畸变。

畸变校正
opencv提供了可以直接使用的矫正算法,即通过calibrate Camera()得到的畸变系数,生成矫正后的图像。我们可以通过undistort()函数一次性完成;也可以通过initUndistortRectifyMap()和remap()的组合来处理。
1、initUndistortRectifyMap()和remap()
void initUndistortRectifyMap( InputArray cameraMatrix, InputArray distCoeffs,
InputArray R, InputArray newCameraMatrix,
Size size, int m1type, OutputArray map1, OutputArray map2 );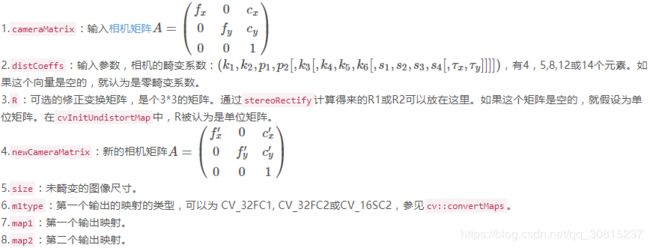
函数说明:
这个函数用于计算无畸变和修正转换关系,为了重映射,将结果以映射的形式表达。无畸变的图像看起来就像原始的图像,就像这个图像是用内参为newCameraMatrix的且无畸变的相机采集得到的。
在单目相机例子中,newCameraMatrix一般和cameraMatrix相等,或者可以用cv::getOptimalNewCameraMatrix来计算,获得一个更好的有尺度的控制结果。
在双目相机例子中,newCameraMatrix一般是用cv::stereoRectify计算而来的,设置为P1或P2。 此外,根据R,新的相机在坐标空间中的取向是不同的。例如,它帮助配准双目相机的两个相机方向,从而使得两个图像的极线是水平的,且y坐标相同(在双目相机的两个相机谁水平放置的情况下)。 该函数实际上为反向映射算法构建映射,供反向映射使用。也就是,对于在已经修正畸变的图像中的每个像素(u,v),该函数计算原来图像(从相机中获得的原始图像)中对应的坐标系。
函数输出得到map1和map2,然后使用remap()函数:
void remap( InputArray src, OutputArray dst,
InputArray map1, InputArray map2,
int interpolation, int borderMode=BORDER_CONSTANT,
const Scalar& borderValue=Scalar());- 第一个参数:输入图像,即原图像,需要单通道8位或者浮点类型的图像
- 第二个参数:输出图像,即目标图像,需和原图形一样的尺寸和类型
- 第三个参数:它有两种可能表示的对象:(1)表示点(x,y)的第一个映射;(2)表示CV_16SC2,CV_32FC1等
- 第四个参数:它有两种可能表示的对象:(1)若map1表示点(x,y)时,这个参数不代表任何值;(2)表示 CV_16UC1,CV_32FC1类型的Y值
- 第五个参数:插值方式,有四种插值方式:
(1)INTER_NEAREST——最近邻插值
(2)INTER_LINEAR——双线性插值(默认)
(3)INTER_CUBIC——双三样条插值(默认)
(4)INTER_LANCZOS4——lanczos插值(默认)
第六个参数:边界模式,默认BORDER_CONSTANT
第七个参数:边界颜色,默认Scalar()黑色
2、undistort()函数
void undistort( InputArray src, //输入原图
OutputArray dst,//输出矫正后的图像
InputArray cameraMatrix,//内参矩阵
InputArray distCoeffs,//畸变系数
InputArray newCameraMatrix=noArray() );有时不需要矫正整个图像,而仅仅计算图像中特定点的位置,这是可以使用undistortPoints函数:
void undistortPoints( InputArray src, OutputArray dst,
InputArray cameraMatrix, InputArray distCoeffs,
InputArray R=noArray(), InputArray P=noArray());
undistortPoints函数与undistort()的区别在于:参数src,dst是二维点的向量,std::vector
:undistortPoints(inputDistortedPoints, outputUndistortedPoints, cameraMatrix, distCoeffs, cv::noArray(), cameraMatrix);