python通过udp传输图片
首先要了解UDP的工作模式
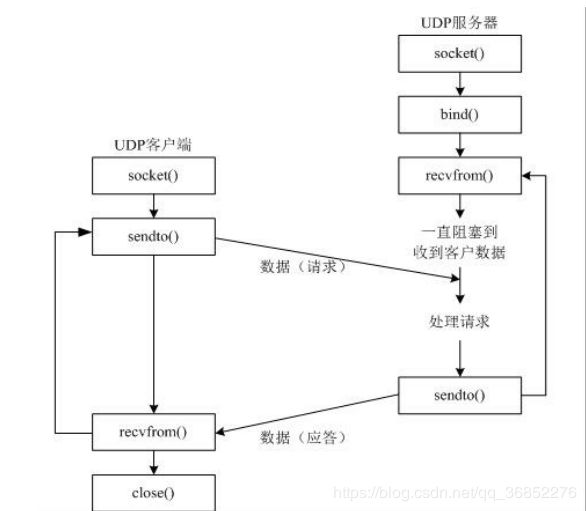
对于服务器,首先绑定IP和端口,本机测试的时候可以使用127.0.0.1是本机的专有IP,端口号 大于1024的是自定义的,所以用大于1024的端口号,然后接收客户端数据,处理,返回
对于客户端,UDP不用建立连接,只管发送不管接收到没有,所以可以直接对服务器的IP地址和端口号发送信息,然后等待应答。
注意传输的数据是二进制流数据,所以要找方法把需要传输的数据编码成二进制码流,传过去之后再解码即可,这里我用到了opencv读取图片成numpy的array格式,然后编码,传输,最后接到之后再解码。
先说一次性传输整个图片,这个思路就是接受的参数设置很大,而且图片比较小的情况,实现比较简单
首先是服务器脚本,实现了接收、显示、应答
udp_sever.py
# -*- coding: utf-8 -*-
import socket
import cv2
import numpy as np
s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
# 绑定端口:
s.bind(('127.0.0.1', 9999))
print('Bind UDP on 9999...')
while True:
# 接收数据:
data, addr = s.recvfrom(400000)
print('Received from %s:%s.' % addr)
#解码
nparr = np.fromstring(data, np.uint8)
#解码成图片numpy
img_decode = cv2.imdecode(nparr, cv2.IMREAD_COLOR)
cv2.imshow('result',img_decode)
cv2.waitKey()
reply = "get message!!!"
s.sendto(reply.encode('utf-8'), addr)
cv2.destroyAllWindows()
客户端脚本,实现了发送图片,接收应答
udp_client.py
# -*- coding: utf-8 -*-
import socket
import cv2
import numpy as np
s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
img = cv2.imread('/home/xbw/jupyter_notebook/0.jpg')
img_encode = cv2.imencode('.jpg', img)[1]
data_encode = np.array(img_encode)
data = data_encode.tostring()
# 发送数据:
s.sendto(data, ('127.0.0.1', 9999))
# 接收数据:
print(s.recv(1024).decode('utf-8'))
s.close()
为了方便理解放一下图片转到二进制再转回图片的代码
import numpy as np
import cv2
img = cv2.imread('0.jpg')
img_encode = cv2.imencode('.jpg', img)[1]
data_encode = np.array(img_encode)
str_encode = data_encode.tostring()
#print(str_encode)
nparr = np.fromstring(str_encode, np.uint8)
img_decode = cv2.imdecode(nparr, cv2.IMREAD_COLOR)
cv2.imshow('result',img_decode)
cv2.waitKey()
cv2.destroyAllWindows()
分批传输图片
搞了好久终于知道怎么分批传输图片了,首先要知道需要传的图片需要多长的内存,不然不知道什么时候停止接收,这样就要考虑加一个文件头,告诉服务器要接受多长的码流。
实现思路是,首先客户端要先发送一个文件头,包含了码流的长度,用一个long int型的数,先用struct.pack打包,发过去,然后循环发送图片的码流即可
接着服务器先接到文件头,确认图片码流的长度,然后循环接收确定长度的码流,最后再解码成图片即可
实现代码如下:
首先是客户端脚本
udp_client.py
# -*- coding: utf-8 -*-
import socket
import cv2
import numpy as np
import struct
s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
#读取图片,编码成二进制 bytes格式
img = cv2.imread('/home/xbw/jupyter_notebook/0.jpg')
img_encode = cv2.imencode('.jpg', img)[1]
data_encode = np.array(img_encode)
data = data_encode.tostring()
#定义文件头,打包成结构体
fhead = struct.pack('l',len(data))
# 发送文件头:
s.sendto(fhead,('127.0.0.1', 9999))
#循环发送图片码流
for i in range(len(data)//1024+1):
if 1024*(i+1)>len(data):
s.sendto(data[1024*i:], ('127.0.0.1', 9999))
else:
s.sendto(data[1024*i:1024*(i+1)], ('127.0.0.1', 9999))
# 接收应答数据:
print(s.recv(1024).decode('utf-8'))
#关闭
s.close()
然后是服务器接收
udp_sever.py
# -*- coding: utf-8 -*-
import socket
import cv2
import numpy as np
import struct
s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
# 绑定端口:
s.bind(('127.0.0.1', 9999))
print('Bind UDP on 9999...')
while True:
# 接收文件头,文件头的长度由calcsize函数确定,注意这里recvfrom是接收UDP消息,recv是接收TCP消息
fhead_size = struct.calcsize('l')
buf,addr = s.recvfrom(fhead_size)
if buf:
#这里结果是一个元组,所以把值取出来
data_size = struct.unpack('l',buf)[0]
#接收图片码流长度的码流
recvd_size = 0
data_total = b''
while not recvd_size == data_size:
if data_size -recvd_size >1024:
data,addr = s.recvfrom(1024)
recvd_size += len(data)
else:
data,addr = s.recvfrom(1024)
recvd_size = data_size
data_total += data
# data, addr = s.recvfrom(400000)
print('Received')
# reply = 'Hello, %s!' % data.decode('utf-8')
# s.sendto(reply.encode('utf-8'), addr)
#把接到的码流解码成numpy数组,显示图像
nparr = np.fromstring(data_total, np.uint8)
img_decode = cv2.imdecode(nparr, cv2.IMREAD_COLOR)
cv2.imshow('result',img_decode)
cv2.waitKey()
#应答
reply = "get message!!!"
s.sendto(reply.encode('utf-8'), addr)
cv2.destroyAllWindows()
------------------------------------------------------------------分割线-------------------------------------------------------------------
上面是基本的实现,经过一番学习我终于掌握了UDP传输的精髓
首先是确定客户端和服务器的运行机制
客户端:先定义一个socket对象,不用绑定,然后指定IP地址和端口发送消息,然后如果用了recvfrom就会一直阻塞等待应答(这个很有用,作用就是保证对方确实收到,再发新的消息,不用在考虑发送频率的问题了),前面加一个while True就可以循环发送了,如果涉及到很大的消息,可以拆分发送,技巧是先发送一个文件头高速服务器要发的内容有多大(文件头这里建议使用stuct库,看前面例程),然后随后发送文件内容,保证要循环发送,因为每次发送,对面就当发了一次,假如发了2048字节的内容,对面设置的每次收1024,那么剩下的1024就被丢掉了,而不是等待下次继续接收。还有就是发送的是二进制的码流,目前我用到的转换成码流的方法有:图片用opencv,先imencode 转成二进制,然后再转成numpy,然后再tostring。文件头这种,需要确切知道占多大内存,使得服务器好接收的,用了stuct库,里面的pack,unpack,calcsize三个函数非常好用,发送的时候把数据pack一下就能发送了。列表、字典等等,作为文件内容,用到了json,有点万能,先json.dumps转换成json类型,然后再encode编码成二进制即可拿去发送了。
服务器:先定义一个socket对象,绑定IP地址和端口,让客户端可以找到,然后等待接收消息,收到消息之后处理消息,应答,配合客户端的recvfrom,保证接收频率一致,服务器为了保证始终接收消息,一定会有一个while True,接收到的消息是二进制码流,因此要进行解码。针对上面讲的编码方式解码,其实就是编码方式的反向操作:图片,用opencv解码,先是np.fromstring,然后再cv2.imdecode(data, cv2.IMREAD_COLOR)。对于接收文件头,这里有点技巧,用struct.calcsize确定文件头长度,然后只接收这个长度的码流,再unpack出来即可,这里unpack是个元组。对于json,解码就是先decode,再json.loads即可,是上面编码的反向操作。
然后再高端一点的操作,同一个脚本多进程工作,这就要用到了threading.Thread创建多个进程,思路就是新建多个服务器,然后分配给不同的进程,他们的IP地址可以一样,端口号不一样就行,然后就可以在同一个脚本里并行工作了,这里不同于TCP,因为UDP不需要建立连接
然后附上我实现的源码,服务器脚本里有两个进程,一个接收客户端1的图片,另一个接收客户端2的列表
服务器
udp_server.py
# -*- coding: utf-8 -*-
import socket
import cv2
import numpy as np
import struct
import threading
import json
#设置IP地址、两个服务器端口号
dest_ip = '127.0.0.1'
img_port = 9999
msg_port = 6666
#服务器1的处理、应答函数,接收图片、显示、应答
def receive_img(rec_img):
while True:
# 接收数据:
fhead_size = struct.calcsize('l')
buf,addr = rec_img.recvfrom(fhead_size)
if buf:
data_size = struct.unpack('l',buf)[0]
print(data_size)
recvd_size = 0
data_total = b''
while not recvd_size == data_size:
if data_size -recvd_size >1024:
data,addr = rec_img.recvfrom(1024)
recvd_size += len(data)
else:
data,addr = rec_img.recvfrom(1024)
recvd_size = data_size
data_total += data
# data, addr = rec_img.recvfrom(400000)
print('Received')
# reply = 'Hello, %s!' % data.decode('utf-8')
# rec_img.sendto(reply.encode('utf-8'), addr)
nparr = np.fromstring(data_total, np.uint8)
img_decode = cv2.imdecode(nparr, cv2.IMREAD_COLOR)
cv2.imshow('result',img_decode)
cv2.waitKey(100)
reply = "get message!!!"
rec_img.sendto(reply.encode('utf-8'), addr)
# cv2.destroyAllWindows()
#服务器2函数,接收消息、输出、应答
def receive_msg(rec_msg):
while True:
msg_data ,msg_addr = rec_msg.recvfrom(1024)
msg_str = msg_data.decode('utf-8')
msg = json.loads(msg_str)
print(msg)
reply = 'get the msg'
rec_msg.sendto(reply.encode('utf-8'),msg_addr)
rec_msg.close()
#主函数 创建服务器、绑定端口、创建运行两个进程、调用上面两个函数
def main():
#创建套接字
rec_img = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
rec_msg = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
#绑定本地地址端口
rec_img.bind((dest_ip, img_port))
rec_msg.bind((dest_ip, msg_port))
#创建进程
t_recimg = threading.Thread(target=receive_img, args=(rec_img,))
t_recmsg = threading.Thread(target=receive_msg, args=(rec_msg,))
#开始进程
t_recimg.start()
t_recmsg.start()
print('程序正常运行!!!')
if __name__ == '__main__':
main()
客户端1
udp_client_1.py
# -*- coding: utf-8 -*-
import socket
import cv2
import numpy as np
import struct
s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
cap = cv2.VideoCapture(0)
#cap.set(3,320)
#cap.set(4,240)
while True:
if cap.isOpened():
flag, img = cap.read()
# img = cv2.imread('/home/xbw/jupyter_notebook/0.jpg')
img_encode = cv2.imencode('.jpg', img)[1]
data_encode = np.array(img_encode)
data = data_encode.tostring()
#定义文件头
fhead = struct.pack('l',len(data))
# 发送文件头、数据:
s.sendto(fhead,('127.0.0.1', 9999))
for i in range(len(data)//1024+1):
if 1024*(i+1)>len(data):
s.sendto(data[1024*i:], ('127.0.0.1', 9999))
else:
s.sendto(data[1024*i:1024*(i+1)], ('127.0.0.1', 9999))
# 接收应答:
cv2.waitKey(1)
print(s.recv(1024).decode('utf-8'))
s.close()
客户端2
udp_client_2.py
import socket
import cv2
import numpy as np
import struct
import json
import time
#定义套接字
send_msg = socket.socket(socket.AF_INET,socket.SOCK_DGRAM)
#设置目标IP地址、端口号
target_ip = '127.0.0.1'
target_port = 6666
#发送数据,等待应答
while True:
data = [0,0,0,1]
data_str = json.dumps(data)
send_msg.sendto(data_str.encode(),(target_ip,target_port))
time.sleep(0.01)
print(send_msg.recv(1024).decode('utf-8'))