Generative Adversarial Networks(生成对抗网络GAN,DCGAN)
Generative Adversarial Networks
GAN的想法很简单,一言以蔽之:以假乱真。
(同样能做到相同效果的生成式模型有变分自编码等,而生成式模型的有点主要在于1.它能够有效的表征高维数据分布2.能够强化学习的辅助手段,更有效的表征state状态3.适用与半监督模型,即在无标签数据中也能训练模型给出输出。)
(GAN相比其他生成式模型的优点在于限制少、性能高。如不需要mcmc的适用分布,不需要VAE的变分界限。)
Generative(生成):GAN实际上可以看作是一个生成数据的工具。目标就是通过学习让自身生成更加真实的数据。
Adversarial (对抗):既然能够以假乱真,对抗的自然就是识别真假的警察了。
变分自编码VAE中有Encoder和Decoder,而GAN 也主要包括了两个部分:
- 生成器(Generator ):生成器努力使生成的图像更加真实,以骗过判别器。
- 判别器(Discriminator) :判别器则需要努力对图片进行真假判别,以识别出真假。
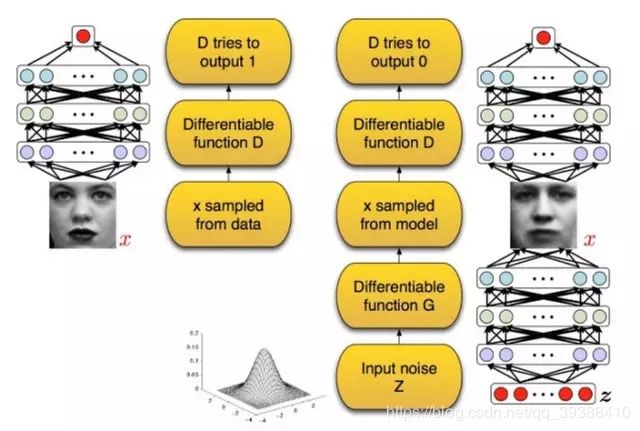
在整个训练过程中,捕获数据分布的生成器G和估计概率的判别器D通过这种不断地对抗最后达到一个动态平衡:即生成器生成的图像十分的接近真实图像的分布,从而造成判别器识别不出真假图像只能瞎猜(判断图片真假为0.5的抛硬币预测),达到以假乱真的目的。真实训练模型如下:
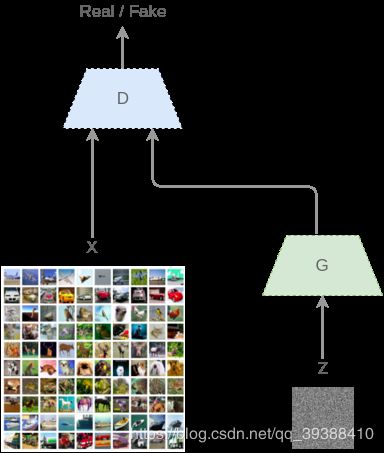
输入一个初始噪声z,然后通过生成器G得到一个伪造的数据G(z)。然后从真实数据集中取一部分即是真实的数据x,将两者混合后丢到判别器D,由判别器做这些图像是真(1)或假(0)的二分类,得到概率D(x),最后计算出loss并回传。根据交叉熵损失此时的损失价值函数 V(D,G) 应该是:

其中真实数据的x服从 P d a t a P_{data} Pdata分布, P z ( z ) P_z(z) Pz(z)是噪声z的分布。G(z) 将z映射到数据空间去拟合真实图像的分布,而D(x)得到真实数据的概率。为了更好的学习到生成器在数据 x 上的分布P,训练时自然使D判断x是从P中取出的期望E最大化,同时最小化伪造的概率 l o g ( 1 − D ( G ( z ) ) ) log(1-D(G(z))) log(1−D(G(z))) 而训练了 G。
但但但!!是什么时候 D 能使 V(D,G) 取最大值?G 能 V(D,G) 取最小值?最优化的点在哪里?P的先验分布是什么?而D和V又是什么样子的函数或者网络?应该如何去学习?一定能收敛吗?
参拜原文: https://arxiv.org/pdf/1406.2661.pdf
原文用了大量的数学推导证明了:
- 最优生成器G值存在唯一解,且该唯一解满足 P G = P d a t a P_G=P_{data} PG=Pdata ,即生成的图像分布和原数据的分布近似的时候。即使用来判别两者分布相近的KL散度的参数 θ \theta θ 最优即可。(JS散度优化了KL的不对称性,效果更好了)
- 最优判别器D满足条件, D ( x ) = P d a t a / ( P d a t a + P G ) D(x)=P_{data}/(P_{data}+P_G) D(x)=Pdata/(Pdata+PG)时,V(D,G)可取唯一的极大值。结合最优G的分布近似条件,可得此时值为50%,意味着分类器已经完全被迷惑了。
- P的先验分布并不需要知道,目标是使G逼近D就可以了。
- 只要有足够的训练数据和正确的环境,训练过程一定会收敛到最优。
- 能用SGD求解。
- 由x和z的分布都不知道,也就不能直接求出V的两个期望E,所以对于这种不知道的隐变量分布,老方法:采样吧!所以整个V可以近似变为:
V = 1 m ∑ i = 1 m l o g D ( x i ) + 1 m ∑ i = 1 m l o g ( 1 − D ( G ( z i ) ) ) V=\frac{1}{m} \sum^m_{i=1}logD(x^i) +\frac{1}{m} \sum^m_{i=1}log(1-D(G(z^i))) V=m1i=1∑mlogD(xi)+m1i=1∑mlog(1−D(G(zi)))
实际训练使用梯度下降法,对D和G交替做优化,步骤为:
- 从随机噪声分布 P z P_z Pz中选出一些样本{ z ( 1 ) , z ( 2 ) , . . . z ( m ) {z^{(1)},z^{(2)},...z^{(m)}} z(1),z(2),...z(m)}。
- 从训练数据x中选出同样m个的真实样本{ x ( 1 ) , x ( 2 ) , . . . x ( m ) {x^{(1)},x^{(2)},...x^{(m)}} x(1),x(2),...x(m)}。
- 设判别器D的参数为 θ d \theta_d θd,求出V关于参数的梯度,对 θ d \theta_d θd更新时加上该梯度
- 设生成器G的参数为 θ g \theta_g θg,同样求出V关于参数的梯度,对 θ g \theta_g θg更新时减去该梯度
损失函数的变种
- LSGAN 将生成样本和真是样本分别编码为 a=-1,b=c=1,并使用平方误差代替了 GAN 的逻辑损失 。这样可以解决一部分训练不稳定和生成图像质量差的问题,但平方误差对离群点的过度惩罚,可能会导致过度模仿真实样本,降低生成结果的多样性。
- f-GAN用了不同的一组散度来衡量真假差(卡方散度,KL,逆KL,JS等等)
DCGAN
Deep Convolutional Generative Adversarial Networks,即深度卷积生成对抗网络。它利用了GAN的思想,专门用来“伪造”图像。判别器D是一个卷积网络,将输入的混合图片变成卷积特征然后通过 Logistic 函数,就得到了表示图像真或假的概率表示。而生成器G的卷积如下图所示:

生成器G的输入是一个为100 维的噪声向量z 。首先通过一个全连接层reshape为4x4x1024的向量,然后再使用几层转置卷积Deconv层做上采样,并且逐渐减少通道数,最后得到的输出64x64x3的“伪造”图片。
反卷积(Deconvolution)
反卷积也称转置卷积,实际上叫转置卷积会更加的合理。它的目的是将一个特征向量不断的放大变成所需要的尺寸,如把100维的噪声向量变成64x64x3大小的图片。

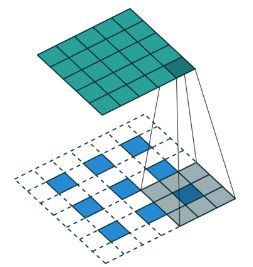
对于普通卷积操作如上图,那么记输入矩阵x为4X4的16维向量,而y是2X2共4维的输出向量,那么其实从 16维到4维的 卷积运算可表示为y = Cx,其中的C为4X16的矩阵如下:

那么如果想要将图像放大,即需要从4维到16维,根据矩阵乘法,其实就只需要左乘 C T C^T CT即可,这也就是转置卷积。
而直观上的理解,在乘 C T C^T CT的时候w的对应位置同样会有大量的0,于是需要在周遭加入0的填充。

另外当stride不为1的时候,转置卷积的卷积核需要变成一个带“洞”的卷积,即微步卷积(fractional stride convolution)。为了完成步长为2,所以必须要带洞的原因是为了使卷积核以更小的步伐移动,以便使计算次数变多,反卷积得到的图也就越大(步长越大,卷积后会越小,反卷积需要越大)。
另外DCGAN与普通GAN不同的思想就是:在它的卷积中是直接用带步长的卷积代替池化,使用BN帮助收敛,G用ReLU(最后一层是tanh,以便图像的像素变成255之内),D用Leaky ReLU,优化函数是Adam。其他的与GAN一致,tf实现的关键代码如下:
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.gridspec as gridspec
import os
#判别器D
X = tf.placeholder(tf.float32, shape=[None, 784])
D_W1 = tf.Variable(variable_init([784, 128]))
D_b1 = tf.Variable(tf.zeros(shape=[128]))
D_W2 = tf.Variable(variable_init([128, 1]))
D_b2 = tf.Variable(tf.zeros(shape=[1]))
theta_D = [D_W1, D_W2, D_b1, D_b2]
#生成器G
Z = tf.placeholder(tf.float32, shape=[None, 100])#100维的噪声向量
G_W1 = tf.Variable(variable_init([100, 128]))
G_b1 = tf.Variable(tf.zeros(shape=[128]))
G_W2 = tf.Variable(variable_init([128, 784]))
G_b2 = tf.Variable(tf.zeros(shape=[784]))
theta_G = [G_W1, G_W2, G_b1, G_b2]
def generator(z):#生成器
#第一层先计算 y=z*G_W1+G_b1,然后投入激活函数计算G_h1=ReLU(y),G_h1 为第二次层神经网络的输出激活值
G_h1 = tf.nn.relu(tf.matmul(z, G_W1) + G_b1)
#以下两个语句计算第二层传播到第三层的激活结果,第三层的激活结果是含有784个元素的向量,该向量转化28×28就可以表示图像
G_log_prob = tf.matmul(G_h1, G_W2) + G_b2
G_prob = tf.nn.sigmoid(G_log_prob)
return G_prob
def discriminator(x):#判别器
#计算D_h1=ReLU(x*D_W1+D_b1),该层的输入为含784个元素的向量
D_h1 = tf.nn.relu(tf.matmul(x, D_W1) + D_b1)
#判别输入的图像到底是真(=1)还是假(=0)
D_logit = tf.matmul(D_h1, D_W2) + D_b2
D_prob = tf.nn.sigmoid(D_logit)
return D_prob, D_logit
#损失函数:
G_sample = generator(Z)#噪音z
D_real, D_logit_real = discriminator(X)#分别判断其真伪
D_fake, D_logit_fake = discriminator(G_sample)
D_loss_real = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=D_logit_real, labels=tf.ones_like(D_logit_real)))
D_loss_fake = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=D_logit_fake, labels=tf.zeros_like(D_logit_fake)))
D_loss = D_loss_real + D_loss_fake#加和两部分
G_loss = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=D_logit_fake, labels=tf.ones_like(D_logit_fake)))
D_solver = tf.train.AdamOptimizer().minimize(D_loss, var_list=theta_D)
G_solver = tf.train.AdamOptimizer().minimize(G_loss, var_list=theta_G)
另外用keras的搭建也很直观,尝试完成和VAE一样生成MINIST的手写数字也很成功。
#生成模型
def generator_model():
model = Sequential()
model.add(Dense(input_dim=100, output_dim=1024))
model.add(Activation('tanh'))
model.add(Dense(128*7*7))
model.add(BatchNormalization())
model.add(Activation('tanh'))
model.add(Reshape((7, 7, 128), input_shape=(128*7*7,)))
model.add(UpSampling2D(size=(2, 2)))#上采样
model.add(Conv2D(64, (5, 5), padding='same'))
model.add(Activation('tanh'))
model.add(UpSampling2D(size=(2, 2)))
model.add(Conv2D(1, (5, 5), padding='same'))
model.add(Activation('tanh'))
return model
#判别模型
def discriminator_model():
model = Sequential()
model.add(
Conv2D(64, (5, 5),
padding='same',
input_shape=(28, 28, 1))
)
model.add(Activation('tanh'))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Conv2D(128, (5, 5)))
model.add(Activation('tanh'))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Flatten())
model.add(Dense(1024))
model.add(Activation('tanh'))
model.add(Dense(1))
model.add(Activation('sigmoid'))#Sigmoid输入类别
return model
完整的细节源代码逐行中文注释:https://github.com/nakaizura/Source-Code-Notebook/tree/master/DCGAN
其中训练过程如下:
可以看到从一个噪音的初始值不断的生成了更好的“伪造”图片。
GAN训练的模式崩溃问题(Mode Collapse)
对于生成模型很重要的两点是:生成器所生成样本的质量和样本多样性。
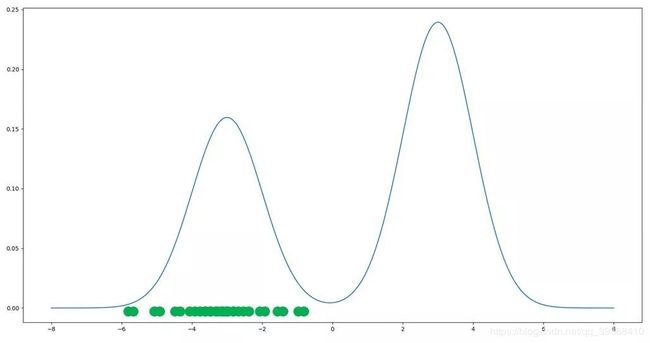
根据数据的流形分布定律,自然界中同一类别的高维数据,往往集中在某个低维流形附近,所以生成器最理想的情况是:将输入的噪声都映射到训练数据所在的流形上,并且与训练数据的概率分布对应。但是如下图,原本应该只生成绿色的点(即符合在两个分布峰下的数据分布),却产生了一些质量不高的红色样本点。

但出现少部分红色的点也在模型训练的可接受范围内,只要样本的整体质量不错就可以了。而关于另一个点–样本的多样性,即模式崩溃问题,生成器所产生样本大量重复类似,基本上只聚集在了一个峰之下。(好比生成手写数字只能够很好的生成数字“1”,但是不能生成其他的任何数字)
这种问题的产生要归功于 GAN的参数优化问题并不是一个凸优化问题,存在许多局部纳什均衡状态,所以如果GAN进入某个纳什均衡状态,即使损失函数表现为收敛,它仍然不是我们想要的结果。那么解决方案只有:
那么如何使生成器能够“及时发现问题”,自动调整权值,将生成样本分散到整个训练数据的流形上呢?改变目标函数。
判别器的目标函数仍然为 θ D = a r g m a x f ( θ G , θ D ) \theta_D=argmaxf(\theta_G,\theta_D) θD=argmaxf(θG,θD)但改变生成器的目标函数,其中K为梯度下降连续更新K次。 θ G = a r g m i n f ( θ G , θ D K ( θ G , θ D ) ) \theta_G=argminf(\theta_G,\theta_D^K(\theta_G,\theta_D)) θG=argminf(θG,θDK(θG,θD))
即生成器在更新时,不仅仅考虑当前生成器的状态,还会额外考虑以当前状态为起始点,判别器更新K次后的状态,综合两个信息做出最优解,从而避免了短视行为。
DRAGAN
DRAGAN是另一种解决模式崩溃的方法,以上通过更改损失函数,但明显提高了计算量。不过观察得知,如果GAN一旦出现模式崩溃问题,判别器在训练样本附近更新参数时,其梯度值非常大,故DRAGAN的解决方法是:对判别器,在训练样本附近施加梯度惩罚项。
E x ∼ p d a t a , ϵ ∼ N d ( 0 , c I ) [ ∣ ∣ ▽ x D ( x + ϵ ) ∣ ∣ − 1 ] 2 E_{x\sim p_{data},\epsilon \sim N_d(0,cI)} [ ||▽ _xD(x+\epsilon)||-1 ]^2 Ex∼pdata,ϵ∼Nd(0,cI)[∣∣▽xD(x+ϵ)∣∣−1]2
这种方式试图在训练样本附近构建线性函数,因为线性函数为凸函数具有全局最优解。
MADGAN
既然单个生成器会造成模式崩溃问题,那么就构造多个生成器吧。即在MADGAN(multi-agent diverse)中,用k个初始值不同的生成器和1个判别器来解决问题,其中判别器的输出softmax需要变成k+1维,即前k维是判断样本来自于那个生成器,k+1是标签,标记是否从第i个生成器获得。判别器的目标函数为交叉熵:
m a x θ d E x ∼ P d a t a l o g [ D k + 1 ( x ) ] + ∑ i = 1 k E x i ∼ p g i l o g [ D i ( x i ) ] max_{\theta_d}E_{x\sim P_{data}} log[D_{k+1}(x)]+\sum_{i=1}^k E_{x_i\sim p_{g_i}}log[D_i(x_i)] maxθdEx∼Pdatalog[Dk+1(x)]+i=1∑kExi∼pgilog[Di(xi)]
直观上会使x尽量靠近某个生成器,而不是其他生成器。而生成器的目标函数为:
m i n θ g i E x ∼ P x l o g [ 1 − D k + 1 ( G i ( z ) ) ] min_{\theta_{g_i}}E_{x\sim P_{x}}log[1-D_{k+1}(G_i(z))] minθgiEx∼Pxlog[1−Dk+1(Gi(z))]
不同的生成器相互排斥以产生不一样的样本。
训练技巧
GAN两大问题:难收敛,模式崩溃。
- Feature matching:最小化判别器出来的特征和真实的特征,而不是预测出标签
- 标签平滑:把1变成0.8-1的随机数
- 谱归一化:对每一层都加入Lipschitz约束
GAN系列总结
关于损失函数的度量问题,LSGAN,f-GAN
模式崩溃问题,DRAGAN,MADGAN
收敛不稳定问题,WGAN,WGAN-GP
对偶学习,源域迁移问题,CycleGAN
条件控制问题,cGAN,IcGAN
图像质量(分辨率)提升,SAGAN,CoGAN
生成的准确性与多样性,IS,FID