【项目分享】基于STM32超声波避障小车
微信公众号:果果小师弟
关注可了解获取更多资料教程。问题或建议,请公众号留言;
如果你觉得此篇文章对你有帮助,欢迎留言关注
不管是对于初学者还是对于一个玩过单片机的电子爱好者来说,或多或少都接触到过小车项目,今天给大家介绍的的一个项目基于STM32超声波避障小车。这也是我曾经的一个课设,在此开源分享给大家,全文5000多字,干货满满,加油读完,保证你收货多多。
震惊!某大学生竟然在宿舍做stm32避障小车
处理器电路设计
单片机是系统的CPU,是系统稳定、正常运行的重要前提,以下为单片机选型的两种方案:
(1)传统的8位单片机,是通过超大规模集成电路对其进行集成为一个独立芯片的控制器。内部组件包括CPU、随机存储器、只读存储器、I/O接口、中断系统、计时器、串口通讯、数模转换等。STC89C52单片机是最常见的51单片机,但是资源较少,精确度低,处理速度相比STM32单片机差很多。
(2)使用目前市面上最常见的STM32单片机,STM32系列单片机可分为ARMCortex-M3内核体系结构的不同应用领域。它可分为STM32F1系列和STM32F4系列,STM32F1系列单片机时钟频率最高可达72米,在同一产品中性能最好。单片机的基本处理速度为36米,16位单片机的性能也很好。微晶片的内建快闪记忆体相当大,范围从32kb到512kb,可视需要选择。单个设备的功耗非常低,仅360mA,32位单片机产品的功耗最低,每兆赫只有0.5安培。特别值得一提的是,内接单晶片汇流排是一种Harvard架构,可执行速度高达1.25 DMIPS/MHz的指令。此芯片越来越多地被用作主要控制器。
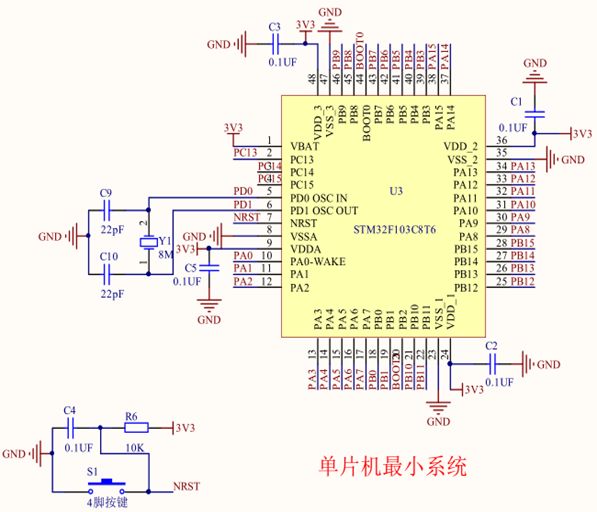
通过对单片机的资源和处理时间的速度我们采用选择STM32103C8T6为本系统主控芯片,程序下载是只需要一个JLINK就可以轻松完成。控制器模块电路如下所示:
电源模块设计
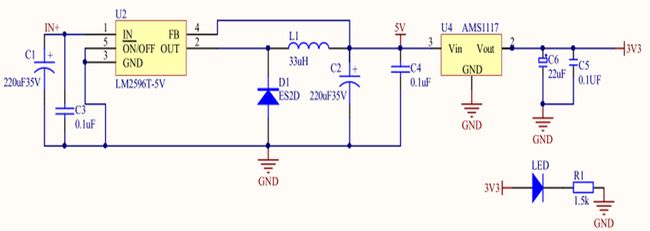
本设计采用锂电池供电, 模块的供电电压一般都为5V,同时超声波模块需要较大的电流才能正常工作,所以在降压的基础上也要保证足够大的输出电流。本设计采用可调输出版本,模块的输入电压范围广,输出电压在1.25V-35V内可调,电压转换效率高,输出纹波小。降压电路如下所示:
电机驱动模块设计
要完成转向是能够利用单片机实现的,然而单片机I0的带负载能力弱,因此我们选择了大功率放大器件TB6612FNG。TB6612FNG是采用MOSFET-H桥结构的双通道大电流电路输出,可以控制2个电机的驱动。相比普通的电机驱动,外围电路非常简单,只需要一个芯片和一个钽电容进行PWM输出滤波,系统尺寸小。PWM信号输入频率范围广,轻松满足本设计的需求。
电源驱动引脚表
控制芯片:TB6612
控制芯片数量:2
1号TB6612引脚分配:
VM PWMA--------->TIM1_CH1(PA8)
VCC AIN2--------->GPIOB_12
GND AIN1--------->GPIOB_13
AO1 STBY--------->GPIOB_14
AO2 BIN1--------->GPIOB_15
BO2 BIN2--------->GPIOA_12
BO1 PWMB--------->TIM1_CH2(PA9)
GND GND
2号TB6612引脚分配:
VM PWMA--------->TIM1_CH3(PA10)
VCC AIN2--------->GPIOB_5
GND AIN1--------->GPIOB_6
AO1 STBY--------->GPIOB_7
AO2 BIN1--------->GPIOB_8
BO2 BIN2--------->GPIOA_9
BO1 PWMB--------->TIM1_CH4(PA11)
GND GND
真值表
AIN1 0 1 0 1
AIN2 0 0 1 1
BIN1 0 1 0 1
BIN2 0 0 1 1
停止 正转 反转 刹车
电机所用到的定时器配置
//初始化TIMX,设置TIMx的ARR,PSC
//arr:自动重装载初值,psc为预分频值,两者配合控制定时器时钟的周期
//定时器选择TIM1
static void TB6612_ADVANCE_TIM1_Mode_Config(TIM_TypeDef* TIMx,uint16_t arr,uint16_t psc,uint16_t duty)
{
//-----------------时基结构体初始化-------------------------/
TIM_TimeBaseInitTypeDef TIM_TimeStructure;
/*开启定时器1时钟,即内部时钟CK_INT=72M*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
TIM_DeInit(TIMx);
/*内部时钟作为计数器时钟,72MHZ*/
TIM_InternalClockConfig(TIMx);
/*自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断*/
TIM_TimeStructure.TIM_Period=arr;
/*时钟预分频系数为71,则驱动计数器的时钟CK_CNT=CK_INT/(71+1)=1MHZ*/
TIM_TimeStructure.TIM_Prescaler=psc-1;
/*设置时钟分割,TIM_CKD_DIV1=0,PWM波不延时*/
TIM_TimeStructure.TIM_ClockDivision=TIM_CKD_DIV1;
/*向上计数模式*/
TIM_TimeStructure.TIM_CounterMode=TIM_CounterMode_Up;
/*重复计数器*/
TIM_TimeStructure.TIM_RepetitionCounter=0;
/*初始化定时器*/
TIM_TimeBaseInit(TIMx,&TIM_TimeStructure);
/*使能ARR预装载寄存器(影子寄存器)*/
TIM_ARRPreloadConfig(TIMx,ENABLE);
//-----------------输出比较结构体初始化-----------------------/
TIM_OCInitTypeDef TIM_OCInitStructure;
/*PWM模式设置,设置为PWM模式1*/
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
/*PWM输出使能相应的IO口输出信号*/
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
/*设置占空比大小,CCR1[15:0]: 捕获/比较通道1的值,若CC1通道配置为输出:CCR1包含了装入当前捕获/比较1寄存器的值(预装载值)。*/
TIM_OCInitStructure.TIM_Pulse=duty;
/*输出通道电平极性设置*/
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
/*初始化输出比较参数*/
TIM_OC1Init(TIMx,&TIM_OCInitStructure);//初始化TIM1 通道1
TIM_OC2Init(TIMx,&TIM_OCInitStructure);//初始化TIM1 通道2
TIM_OC3Init(TIMx,&TIM_OCInitStructure);//初始化TIM1 通道3
TIM_OC4Init(TIMx,&TIM_OCInitStructure);//初始化TIM1 通道4
/*自动重装载*/
TIM_OC1PreloadConfig(TIMx,TIM_OCPreload_Enable);
TIM_OC2PreloadConfig(TIMx,TIM_OCPreload_Enable);
TIM_OC3PreloadConfig(TIMx,TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIMx,TIM_OCPreload_Enable);
/*使能计数器*/
TIM_Cmd(TIMx,ENABLE);
/*主输出使能,如果设置了相应的使能位(TIMx_CCER寄存器的CCxE、CCxNE位),则开启OC和OCN输出。*/
TIM_CtrlPWMOutputs(TIMx,ENABLE);
}
//高级定时器输出通道初始化函数
static void TB6612_ADVANCE_TIM_Gpio_Config()
{
GPIO_InitTypeDef GPIO_InitStruct;
/*----------通道1配置--------------*/
/*定时器1输出比较通道*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
/*配置为复用推挽输出*/
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_8;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
/*-----------通道二配置-------------*/
/*定时器1输出比较通道*/
/*配置为复用推挽输出*/
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_11;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
/*-----------通道三配置-------------*/
/*定时器1输出比较通道*/
/*配置为复用推挽输出*/
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
/*-----------通道四配置-------------*/
/*定时器1输出比较通道*/
/*配置为复用推挽输出*/
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
}
超声波模块
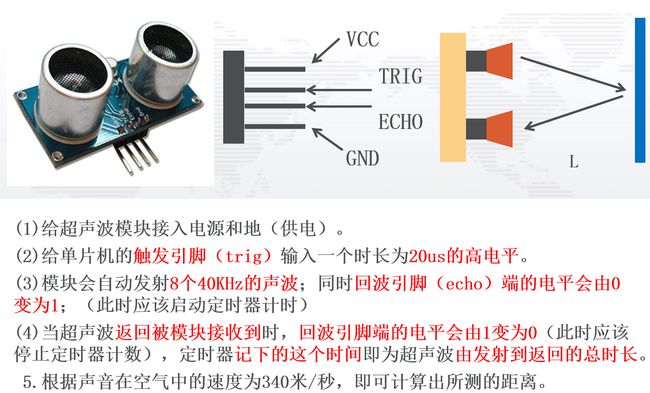
采用HC-SR04超声波模块,该芯片具有较高的集成度以及良好的稳定性,测度距离十分精确,十分稳定。供电电压为DC5V供电电流小于10mA,探测距离为0.010m-3.5m一共有四个引脚VCC(DC5V)、Triger(发射端)、Echo(接收端)、GND(地)。HC-SR04实物图如下:

该模块是利用单片机的IO触发电平测距,单片机内部利用普通定时器产生一个高电平信号之后,超声波就可以自主发送频率为40khz的方波,然后等待信号的返回;若有信号返回,单片机IO口就立刻输出一高电平,利用高电平产生的时间可以计算小车与障碍物的距离。最终距离就是高电平持续时间乘以声音在空气中传播的速度再除以2,可以反复测量距离。
在程序开始首先初始化超声波,利用定时器并设置时基的自动重装载初值1000,psc为预分频值72,这样的话我们产生一次中断的时间是1ms,并设置抢占优先级0,子优先级3。HC_SR04_Echo引脚接收到高电平,打开定时器,且每1ms进入一次中断。在测量时首先让Trig发送一个大于10us的高电平,然后拉高HC_SR04_Trig,当Echo为0时打开定时器计时,当Echo为1时关闭定时器,通过公式计算距离。
模块工作原理:
(1)单片机触发引脚,输出高电平信号;
(2)模块发送端自动发送特定频率的方波;
(3)如果有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波的发射时长;
(4)测试距离=(高电平时间*声速(340M/S))/2。
注意:在硬件操作上需要首先让模块地端先连接,否则会影响模块工作。测距时,被测物体的摆放不能太过于杂乱,否则会影响测试结果。
超声波重要代码(可参考)
/* 获取接收到的高电平的时间(us*/
uint32_t Get_HC_SR04_Time(void)
{
uint32_t t=0;
t=Acoustic_Distance_Count*1000;//us
t+=TIM_GetCounter(TIM2);//获取us
TIM2->CNT =0;
Acoustic_Distance_Count=0;
Systic_Delay_us(100);
return t;
}
/*获取距离*/
void Get_HC_SR04_Distance(void)
{
static uint16_t count=0;
switch(count)
{
case 1:
{
GPIO_SetBits(Acoustic_Port,HC_SR04_Trig);//Trig发送一个大于10us的高电平
}break;
case 15:
{
count=0;
GPIO_ResetBits(Acoustic_Port,HC_SR04_Trig);
while(GPIO_ReadInputDataBit(Acoustic_Port,HC_SR04_Echo)==0);//当Echo为0时打开定时器 计时
Open_Tim2();
while(GPIO_ReadInputDataBit(Acoustic_Port,HC_SR04_Echo)==1);//当Echo为0时打开定时器 计时
Close_Tim2();
HC_SR04_Distance=(float)(Get_HC_SR04_Time()/5.78);
}break;
default:break;
}
count++;
}
舵机模块
本系统使用的是SG90型号的舵机,舵机是一种常见的角度驱动器,本系统需要判断不同位置的障碍物可以且对转向的力度小。舵机可以理解为方向盘称,方向盘是一个常见的名字。它实际上是一个伺服马达。舵机实物图如下:

舵机模块接口简单,舵机模块只有三个引脚。分别引引出了三根线左右两边是电源正负接口线,中间一根是PWM信号线直接连接单片机的控制引脚。通过控制单片机的引脚输出的脉冲宽度进而控制舵机旋转的角度。舵机每增加0.1ms 舵机对应增加9度。
0.5ms---------0
1.0ms---------45
1.5ms---------90
2.0ms---------135
2.5ms-----------180
20ms的时基脉冲,如果想让舵机转90度,就应该发生一个高电平持续时间为1.5ms,周期为20ms的方波,duty=1.5/20=7.5%。在这里设置定时器自动重装载寄存器arr的值为1000,所以当占空比为百分之75是,在程序中就要设置占空比为75/1000=7.5%, 这就是具体的算法。
舵机重要代码(可参考)
/**PWM引脚初始化*/
static void SERVO_Gpio_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
/*----------通道2配置--------------*/
/*定时器3输出比较通道*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
/*配置为复用推挽输出*/
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
}
//定时器3初始化,设置TIMx的ARR,PSC
//arr:自动重装载初值,psc为预分频值,两者配合控制定时器时钟的周期
static void SERVO_TIM_Config(TIM_TypeDef* TIMx,uint16_t arr,uint16_t psc,uint16_t duty)
{
//-----------------时基结构体初始化-------------------------/
TIM_TimeBaseInitTypeDef TIM_TimeStructure;
/*开启定时器3时钟,即内部时钟CK_INT=72M*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
TIM_DeInit(TIMx);
/*内部时钟作为计数器时钟,72MHZ*/
TIM_InternalClockConfig(TIMx);
/*自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断*/
TIM_TimeStructure.TIM_Period=arr;//1000 当定时器从0计数到999,即1000次,为一个定时周期
/*时钟预分频系数为71,则驱动计数器的时钟CK_CNT=CK_INT/(1440-1+1)=0.05MHZ*/
TIM_TimeStructure.TIM_Prescaler=psc-1;;//1400 //即定时器的频率为5KHZ
/*设置时钟分割,TIM_CKD_DIV1=0,PWM波不延时*/
TIM_TimeStructure.TIM_ClockDivision=TIM_CKD_DIV1;
/*向上计数模式*/
TIM_TimeStructure.TIM_CounterMode=TIM_CounterMode_Up;
/*重复计数器*/
TIM_TimeStructure.TIM_RepetitionCounter=0;
/*初始化定时器*/
TIM_TimeBaseInit(TIMx,&TIM_TimeStructure);
/*使能ARR预装载寄存器(影子寄存器)*/
TIM_ARRPreloadConfig(TIMx,ENABLE);
//-----------------输出比较结构体初始化 开始-----------------------/
TIM_OCInitTypeDef TIM_OCInitStructure;
/*PWM模式设置,设置为PWM模式1*/
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
/*PWM输出使能相应的IO口输出信号*/
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
/*设置占空比大小,CCR1[15:0]: 捕获/比较通道1的值,若CC1通道配置为输出:CCR1包含了装入当前捕获/比较1寄存器的值(预装载值)。*/
TIM_OCInitStructure.TIM_Pulse=duty; //占空比大小
/*输出通道电平极性设置*/
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
/*初始化输出比较参数*/
TIM_OC2Init(TIMx,&TIM_OCInitStructure);
//-----------------输出比较结构体初始化 结束-----------------------/
/*自动重装载*/
TIM_OC2PreloadConfig(TIMx,TIM_OCPreload_Enable);
/*使能计数器*/
TIM_Cmd(TIMx,ENABLE);
/*主输出使能,如果设置了相应的使能位(TIMx_CCER寄存器的CCxE、CCxNE位),则开启OC和OCN输出。*/
TIM_CtrlPWMOutputs(TIMx,ENABLE);
}
/*舵机PWM初始化
每增加0.1ms 舵机对应增加9度
0.5ms---------0
1.0ms---------45
1.5ms---------90
2.0ms---------135
2.5ms-----------180
2.1ms turn_left=150
0.8ms turn_right=25
1.3ms turn_front=75
20ms的时基脉冲,如果想让舵机转90度,就应该发生一个高电平为1.5ms,周期为20ms的方波,duty=1.5/20=7.5% ,而定时器自动重装载寄存器arr的值为 1000 ,所以duty=75,时占空比为75/1000=7.5%.
*/
void SERVO_Init(void)
{
SERVO_Gpio_Init();
SERVO_TIM_Config(TIM3,1000,1440,turn_front);
/** 我们把定时器设置自动重装载寄存器 arr 的值为 1000,设置时钟预分频器为 1440,则
驱动计数器的时钟:CK_CNT = CK_INT / (1440-1+1)=0.05M,则计数器计数一次的时间等于:
1/CK_CNT=20us,当计数器计数到 ARR 的值 1000 时,产生一次中断,则中断一次的时间
为:1/CK_CNT*ARR=20ms。
PWM 信号的频率 f = TIM_CLK/{(ARR+1)*(PSC+1)} TIM_CLK=72MHZ
= 72 000 000/(1000*1440)=5KHZ
*/
}
/*舵机角度控制*/
void SERVO_Angle_Control(uint16_t Compare2)
{
TIM_SetCompare2(TIM3,Compare2);
}
编码器模块
调节小车前进的速度和避障快慢我们采用EC11旋转式编码器,可以用于光度、湿度、音量调节等参数的调节。EC11编码器的形状类似于电位器,中心有一个旋钮可以调节PWM信号,光电码盘利用光电转换原理输出三组方波脉冲。EC11编码器的实物图如下:

用来显示小车转速,以及左右编码器数值和电池电压等参数所用的是OLED显示模块,分辨率较高,而且功耗低,正常显示时仅0.06W,供电电压范围在3.3V-5V,有IIC和SPI两种通信协议可供选择。显示模块的亮度和对比度可以通过程序设置。由于它使用寿命长以及其他的优点,OLED更加适合小系统,本系统由于单片机引脚有限,不适合利用简单的LCD1602或者12864来显示,在多方对比之下OLED效果更好。OLED显示部分相对比较简单,大家参考中景园的例程就可以实现。
