基于STC89c52rc单片机的红外循迹小车
循迹小车
由于要准备明年的恩智浦飞思卡尔智能车比赛,飞思卡尔智能车用的是K60系列的单片机,以我目前的阶段来说还处于学习阶段,所以先试着用51单片机做一个智能循迹小车。学习一下小车硬件以及软件程序,这也是对我前一段时间来51单片机和C语言学习的总结。
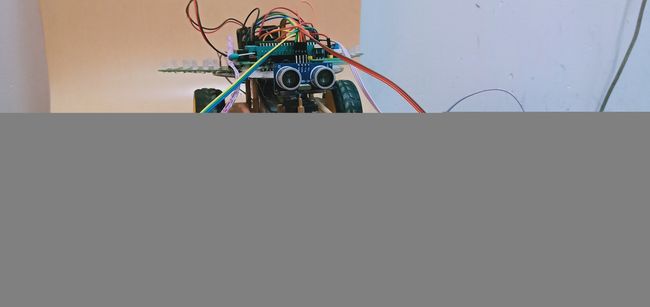
在小车的前面有一个超声波传感器和一个金属齿轮的舵机,因为想再加一个避障,但在本程序中我只实现了一个红外循迹加调速的功能,没有使用超声波传感器和舵机。
视频
循迹小车
硬件部分
**1、**车模底板我是用以前学长做过的废车模,我用热熔胶粘上去两个直流减速电机和一个万向轮。

**2、**使用的芯片是stc89c52rc,控制系统用的是51最小系统,本来想用自己焊接的最小系统,因为考虑到车模搭建好后写程序时需要多次调试就使用了现成的51最小系统,避免了stc89c52rc芯片引脚的折损。

**3、**选用的电机驱动是L298N
L298N可以控制两个电机,而且还具有降压的功能,可以将12V的电降成5V来给最小系统供电。如果使用tb6612电机驱动或没有降压功能的电机驱动,则需要接稳压模块。
L298N上有6个信号端口,其中有两个是控制两个电机的使能端,在本程序中没有使用使能端。类外还有四个信号端是是用来驱动两个电机正转、反转、停止的。

**4、**考虑到电机驱动在运行的时候会发热,我在电机驱动后面装了一个小风扇主要起散热的作用。

**5、**使用了4个红外传感器,两边的用来控制方向,中间放了两个主要用来上坡,上坡时用于前头会抬起来导致最前面两边的得传感器检测不到白色,这时候中间的两个传感器还会检测到白色,使小车继续前进。



**6、**电池用的是11.1v3000ma的锂电池。

**7、**因为感觉车有点丑,我在后面装了两块电路板在上面焊接了一些LED灯,最开始的构想是当小车左转时左边的灯亮,右转时右边的灯亮,前进时两边的灯亮,结果在调试程序的时候发现和电机调速的定时器有冲突,只好选择了在运行程序时所有的LED灯都给低电平,让LED灯常亮。

软件部分
转弯采用的是差速转弯,通过控制左右电机的速度来实现转弯。
**1、**左轮调速
void motor_left(bit left_core,uchar ENA) //左电机正反转 占空比
{
if(left_core==1) //left_core==1 左电机正转 小车直走
{
in1=1;
if(cut<=ENA)
{
in2=0;
}
else
{
in2=1;
}
}
else //left_core==0 左电机反转转 小车倒退
{
in2=1;
if(cut<=ENA)
{
in1=0;
}
else
{
in1=1;
}
}
} **2、**右轮调速
void motor_right(bit right_core,uchar ENB) //右电机正反转 占空比
{
if(right_core==1) //right_core==1 右电机正转 小车直走
{
in3=1;
if(cut<=ENB)
{
in4=0;
}
else
{
in4=1;
}
}
else //right_core==0 右电机反转 小车倒退
{
in4=1;
if(cut<=ENB)
{
in3=0;
}
else
{
in3=1;
}
}
} **3、**前进
void run() //前进 普通速度
{
motor_left(1,4); //左电机正转 速度为4 全速为9 此时速度为全速的4/9
motor_right(1,4); //右电机正转 速度为4 全速为9 此时速度为全速的4/9
}
void run_go() //前进 快速前进 用于上坡
{
motor_left(1,5); //左电机正转 速度为5 全速为9 此时速度为全速的5/9
motor_right(1,5); //右电机正转 速度为5 全速为9 此时速度为全速的5/9
}左右转弯通过控制两边的转速来达到转弯的目的
**4、**左转
void turn_left() //前左转函数 左右电机都正转 但各自的转速不同实现转弯
{
motor_left(1,9); //左电机正转 速度为9 全速为9 此时速度为全速的9/9
motor_right(1,2); //右电机正转 速度为2 全速为9 此时速度为全速的2/9
} **5、**右转
void turn_right() //前右转函数 左右电机都正转 但各自的转速不同实现转弯
{
motor_left(1,2); //左电机正转 速度为2 全速为9 此时速度为全速的2/9
motor_right(1,9); //右电机正转 速度为9 全速为9 此时速度为全速的9/9
} **6、**停止 电机驱动上控制两个电机的I/O口都置高电平
void stop() //停止函数 全部置高电平急停
{
in1=1;
in2=1;
in3=1;
in4=1;
} 好了话不多说我们来看看所有的程序吧
#include总结
在这次做51小车时最重要的是调试程序,因为对于不同的弯道,小车行驶的速度会在转弯时影响红外传感器能不能检测到黑色,速度过快会使是小车冲出赛道,所以需要不停的修改参数进行调速。
再就是对于红外传感器的灵敏度的调试,不同的高度灵敏度不同需要进行不断地调试找最合适的灵敏度,使小车灵敏的检测到黑色。