李理:三层卷积网络和vgg的实现
本系列文章面向深度学习研发者,希望通过Image Caption Generation,一个有意思的具体任务,深入浅出地介绍深度学习的知识。本系列文章涉及到很多深度学习流行的模型,如CNN,RNN/LSTM,Attention等。本文为第12篇。
作者:李理
目前就职于环信,即时通讯云平台和全媒体智能客服平台,在环信从事智能客服和智能机器人相关工作,致力于用深度学习来提高智能机器人的性能。相关文章:
李理:从Image Caption Generation理解深度学习(part I)
李理:从Image Caption Generation理解深度学习(part II)
李理:从Image Caption Generation理解深度学习(part III)
李理:自动梯度求解 反向传播算法的另外一种视角
李理:自动梯度求解——cs231n的notes
李理:自动梯度求解——使用自动求导实现多层神经网络
李理:详解卷积神经网络
李理:Theano tutorial和卷积神经网络的Theano实现 Part1
李理:Theano tutorial和卷积神经网络的Theano实现 Part2
李理:卷积神经网络之Batch Normalization的原理及实现
李理:卷积神经网络之Dropout
卷积神经网络的原理已经在《李理:卷积神经网络之Batch Normalization的原理及实现》以及《李理:卷积神经网络之Dropout》二文中详细讲过了,这里我们看怎么实现。
5.1 cell1-2
打开ConvolutionalNetworks.ipynb,运行cell1和2
5.2 cell3 实现最原始的卷积层的forward部分
打开layers.py,实现conv_forward_naive里的缺失代码:
N, C, H, W = x.shape
F, _, HH, WW = w.shape
stride = conv_param['stride']
pad = conv_param['pad']
H_out = 1 + (H + 2 * pad - HH) / stride
W_out = 1 + (W + 2 * pad - WW) / stride
out = np.zeros((N,F,H_out,W_out))
# Pad the input
x_pad = np.zeros((N,C,H+2*pad,W+2*pad))
for n in range(N):
for c in range(C):
x_pad[n,c] = np.pad(x[n,c],(pad,pad),'constant', constant_values=(0,0))
for n in range(N):
for i in range(H_out):
for j in range(W_out):
current_x_matrix = x_pad[n, :, i * stride: i * stride + HH, j * stride:j * stride + WW]
for f in range(F):
current_filter = w[f]
out[n,f,i,j] = np.sum(current_x_matrix*current_filter)
out[n,:,i,j] = out[n,:,i,j]+b我们来逐行来阅读上面的代码
5.2.1 第1行
首先输入x的shape是(N, C, H, W),N是batchSize,C是输入的channel数,H和W是输入的Height和Width
5.2.2 第2行
参数w的shape是(F, C, HH, WW),F是Filter的个数,HH是Filter的Height,WW是Filter的Width
5.2.3 第3-4行
从conv_param里读取stride和pad
5.2.4 第5-6行
计算输出的H_out和W_out
5.2.5 第7行
定义输出的变量out,它的shape是(N, F, H_out, W_out)
5.2.6 第8-11行
对x进行padding,所谓的padding,就是在一个矩阵的四角补充0。
首先我们来熟悉一下numpy.pad这个函数。
In [19]: x=np.array([[1,2],[3,4],[5,6]])
In [20]: x
Out[20]:
array([[1, 2],
[3, 4],
[5, 6]])首先我们定义一个3*2的矩阵
然后给它左上和右下都padding1个0。
In [21]: y=np.pad(x,(1,1),'constant', constant_values=(0,0))
In [22]: y
Out[22]:
array([[0, 0, 0, 0],
[0, 1, 2, 0],
[0, 3, 4, 0],
[0, 5, 6, 0],
[0, 0, 0, 0]])我们看到3*2的矩阵的上下左右都补了一个0。
我们也可以只给左上补0:
In [23]: y=np.pad(x,(1,0),'constant', constant_values=(0,0))
In [24]: y
Out[24]:
array([[0, 0, 0],
[0, 1, 2],
[0, 3, 4],
[0, 5, 6]])了解了pad函数之后,上面的代码就很容易阅读了。对于每一个样本,对于每一个channel,这都是一个二位的数组,我们根据参数pad对它进行padding。
5.2.7 第12-19行
这几行代码就是按照卷积的定义:对于输出的每一个样本(for n in range(N)),对于输出的每一个下标i和j,我们遍历所有F个filter,首先找到要计算的局部感知域:
current_x_matrix = x_pad[n,:, i*stride: i*stride+HH, j*stride:j*stride+WW]这会得到一个(C, HH, WW)的ndarray,也就是下标i和j对应的。
然后我们把这个filter的参数都拿出来:
current_filter = w[f]它也是(C, HH, WW)的ndarray。
然后对应下标乘起来,最后加起来。
如果最简单的实现,我们还应该加上bias
out[n,f,i,j]+=b[f]这也是可以的,但是为了提高运算速度,我们可以把所有filter的bias一次用向量加法实现,也就是上面代码的方式。
其中烦琐的地方就是怎么通过slice得到当前的current_x_matrix。不清楚的地方可以参考下图:
关于上面的4个for循环,其实还有一种等价而且看起来更自然的实现:
for n in range(N):
for f in range(F):
current_filter = w[f]
for i in range(H_out):
for j in range(W_out):
current_x_matrix = x_pad[n, :, i * stride: i * stride + HH, j * stride:j * stride + WW]
out[n, f, i, j] = np.sum(current_x_matrix * current_filter)
out[n, f, i, j] = out[n, f, i, j] + b[f]为什么不用这种方式呢?
首先这种方式bias没有办法写出向量的形式了,其次我觉得最大的问题是切片操作次数太多,对于这种方式,current_x_matrix从x_pad切片的调用次数是N F H_out*W_out。切片会访问不连续的内存,这是会极大影响性能的。
5.3 cell4
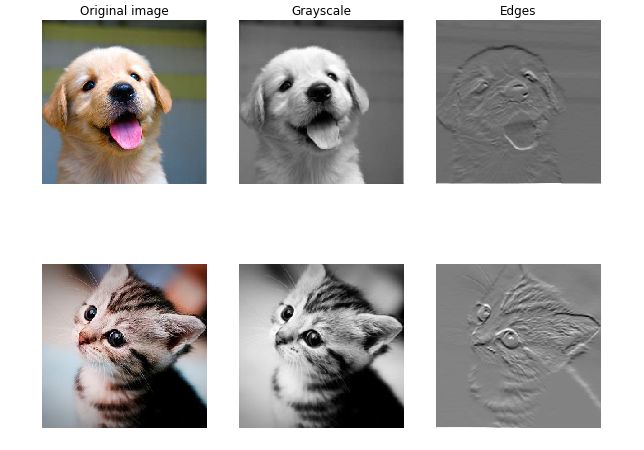
通过卷积实现图像处理。
这个cell通过卷积来进行图像处理,实现到灰度图的转化和边缘检测。这一方面可以验证我们之前的算法,另外也可以演示卷积可以提取一些特征。
实现灰度图比较简单,每个像素都是 gray=r∗0.1+b∗0.6+g∗0.3
用一个卷积来实现就是:
w[0, 0, :, :] = [[0, 0, 0], [0, 0.3, 0], [0, 0, 0]]
w[0, 1, :, :] = [[0, 0, 0], [0, 0.6, 0], [0, 0, 0]]
w[0, 2, :, :] = [[0, 0, 0], [0, 0.1, 0], [0, 0, 0]]而下面的filter是一个sobel算子,用来检测水平的边缘:
w[1, 0, :, :] =0
w[1, 1, :, :] =0
w[1, 2, :, :] = [[1, 2, 1], [0, 0, 0], [-1, -2, -1]]感兴趣的读者可以参考 sobel operator
读者可能问了,这么做有什么意义?这个例子想说明的是卷积能够做一些图像处理的事情,而通过数据的驱动,是可以(可能)学习出这样的特征的。而在深度学习之前,很多时候是人工在提取这些特征。以前做图像识别,需要很多这样的算子,需要很多图像处理的技术,而现在就不需要那么多了。
这个cell不需要实现什么代码,直接运行就好了。
5.4 cell5 实现conv_backward_naive
代码如下:
x, w, b, conv_param = cache
stride = conv_param['stride']
pad = conv_param['pad']
N, C, H, W = x.shape
F, _, HH, WW = w.shape
_,_,H_out,W_out = dout.shape
x_pad = np.zeros((N,C,H+2*pad,W+2*pad))
for n in range(N):
for c in range(C):
x_pad[n,c] = np.pad(x[n,c],(pad,pad),'constant', constant_values=(0,0))
db = np.zeros((F))
dw = np.zeros(w.shape)
dx_pad = np.zeros(x_pad.shape)
for n in range(N):
for i in range(H_out):
for j in range(W_out):
current_x_matrix = x_pad[n, :, i * stride: i * stride + HH, j * stride:j * stride + WW]
for f in range(F):
dw[f] = dw[f] + dout[n,f,i,j]* current_x_matrix
dx_pad[n,:, i*stride: i*stride+HH, j*stride:j*stride+WW] += w[f]*dout[n,f,i,j]
db = db + dout[n,:,i,j]
dx = dx_pad[:,:,pad:H+pad,pad:W+pad]代码和forward很像,首先是把cache里的值取出来。由于x_pad没有放到cache里,这里还需要算一遍,当然也可以修改上面的forward,这样避免padding。
然后定义db,dw,dx_pad
最后是和forward完全一样的一个4层for循环,区别是:
#forward
current_x_matrix = x_pad[n, :, i * stride: i * stride + HH, j * stride:j * stride + WW]
out[n,f,i,j] = np.sum(current_x_matrix* w[f])
#backward
dw[f] += dout[n,f,i,j]*current_x_matrix
dx_pad[....]+=dout * w[f]这里的小小技巧就是 z=np.sum(matrix1*matrix2),怎么求dz/dmatrix1。
答案就是matrix2。
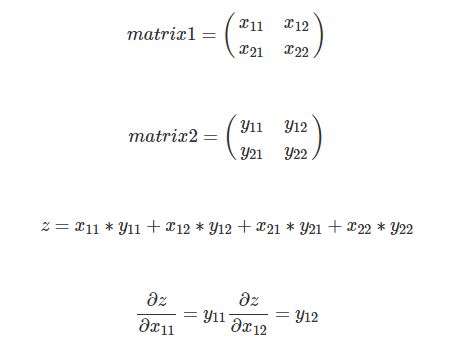
所以写出矩阵的形式就是dz/matrix1=matrix2。
我们运行一下这个cell,如果相对误差小于10的-9次方,那么我们的实现就是没有问题的。
5.5 cell6 实现max_pool_forward_naive
N, C, H, W = x.shape
pool_height = pool_param['pool_height']
pool_width = pool_param['pool_width']
stride = pool_param['stride']
H_out = 1 + (H - pool_height) / stride
W_out = 1 + (W - pool_width) / stride
out = np.zeros((N,C,H_out,W_out))
for n in range(N):
for c in range(C):
for h in range(H_out):
for w in range(W_out):
out[n,c,h,w] = np.max(x[n,c, h*stride:h*stride+pool_height, w*stride:w*stride+pool_width])max_pool的forward非常简单,就是在对应的局部感知域里选择最大的那个数就行。
5.6 cell7 实现max_pool_backward_naive
x, pool_param = cache
pool_height = pool_param['pool_height']
pool_width = pool_param['pool_width']
stride = pool_param['stride']
N, C, H_out, W_out = dout.shape
dx = np.zeros(x.shape)
for n in range(N):
for c in range(C):
for h in range(H_out):
for w in range(W_out):
current_matrix = x[n, c, h * stride:h * stride + pool_height, w * stride:w * stride + pool_width]
max_idx = np.unravel_index(np.argmax(current_matrix),current_matrix.shape)
dx[n, c, h * stride + max_idx[0], w * stride + max_idx[1]] += dout[n, c, h, w]backward也很简单,就是最大的局部感知域最大的那个dx是1,其余的是0。为了提高效率,其实forward阶段是可以”记下“最大的那个下标,这里是重新计算的。
稍微注意一下就是np.argmax返回的是最大的下标,是把2维数组展开成一维的下标,为了变成二维数组的下标,我们需要用unravel_index这个函数。
In [3]: x
Out[3]:
array([[1, 2, 3],
[4, 5, 6]])
In [5]: x.argmax()
Out[5]: 5
In [6]: ind = np.unravel_index(np.argmax(x),x.shape)
In [7]: ind
Out[7]: (1, 2)5.7 cell8-9
作业提供了卷积和pooling的加速实现,它里面已经实现好了,我们这里就不再讲解其实现细节了,有兴趣的读者可以参考作业的代码以及参考 http://cs231n.stanford.edu/slides/winter1516_lecture11.pdf 的im2col部分。
这里只是比较了它们的速度

卷积的快速版本和原始版本比较

pooling的快速版本和原始版本比较
5.8 cell10-11
把卷积,pooling和relu组装在一起,代码已经实现,直接执行验证一下就好了
5.9 cell12 三层的卷积神经网络
打开cs231n/cnn.py实现ThreeLayerConvNet
首先我们来看看这个网络的结构:
conv - relu - 2x2 max pool - affine - relu - affine - softmax
这个网络有三层,第一层是卷积-relu激活-max pooling。第二层是全连接层affine-relu激活,第三层是线性的affine加softmax
5.9.1 init函数
这个函数定义了网络的输入维度,卷积的filter个数,卷积的大小,全连接层隐单元个数,输出维度等。请仔细阅读代码中的注释。
def __init__(self, input_dim=(3, 32, 32), num_filters=32, filter_size=7,
hidden_dim=100, num_classes=10, weight_scale=1e-3, reg=0.0,
dtype=np.float32):
"""
初始化一个新的网络
输入:
- input_dim: 三元组 (C, H, W) 给定输入的Channel数,Height和Width
- num_filters: 卷积层的filter的个数(feature map)
- filter_size: filter的width和height,这里假设是一样的。
- hidden_dim: 全连接层hidden unit的个数
- num_classes: 输出的类别数
- weight_scale: 初始化weight高斯分布的标准差
- reg: L2正则化系数
- dtype: 浮点数的类型
"""
self.params = {}
self.reg = reg
self.dtype = dtype
############################################################################
# TODO: Initialize weights and biases for the three-layer convolutional #
# network. Weights should be initialized from a Gaussian with standard #
# deviation equal to weight_scale; biases should be initialized to zero. #
# All weights and biases should be stored in the dictionary self.params. #
# Store weights and biases for the convolutional layer using the keys 'W1' #
# and 'b1'; use keys 'W2' and 'b2' for the weights and biases of the #
# hidden affine layer, and keys 'W3' and 'b3' for the weights and biases #
# of the output affine layer. #
############################################################################
C, H, W = input_dim
self.params['W1'] = np.random.normal(0, weight_scale, (num_filters, C, filter_size, filter_size))
self.params['b1'] = np.zeros(num_filters)
self.params['W2'] = np.random.normal(0, weight_scale, (num_filters*H/2*W/2, hidden_dim))
self.params['b2'] = np.zeros(hidden_dim)
self.params['W3'] = np.random.normal(0, weight_scale, (hidden_dim, num_classes))
self.params['b3'] = np.zeros(num_classes)
############################################################################
# END OF YOUR CODE #
############################################################################
for k, v in self.params.iteritems():
self.params[k] = v.astype(dtype)init主要的代码就是初始化三层卷积网络的参数W和b。
- W1的shape是(num_filters, C, filter_size, filter_size)
- b1的shape是(num_filters)
- W2的shape是(num_filters H/2 w/2, hidden_dim),因为(C, H, W)经过卷积后变成(num_filters, H, W)【这里使用的padding方法使得输出的H和W保持不变】,在经过pooling后H,W减半【这里的pooling没有padding,2*2 pooling,stride是2】
- b2的shape是(hidden_dim)
- W3的shape是(hidden_dim, num_classes)
- b3是(num_classes)
5.9.2 loss函数
在ThreeLayerConvNet类里,我们把predict和loss合并成了一个函数。如果输入y不是None,我们就认为是loss,否则只进行forward部分【loss也要forward】,区别在于predict没有必要计算softmax,只需要计算最好一个affine就行了,原因是softmax是单调的,计算softmax后再挑选最大的那个下标和不计算softmax是一样的。
1. forward部分
conv_out, conv_cache = conv_forward_fast(X, W1, b1, conv_param)
relu1_out, relu1_cache = relu_forward(conv_out)
pool_out, pool_cache = max_pool_forward_fast(relu1_out, pool_param)
affine_relu_out, affine_relu_cache = affine_relu_forward(pool_out, W2, b2)
affine2_out, affine2_cache = affine_forward(affine_relu_out, W3, b3)
scores = affine2_out代码非常简单:
- 第一行是进行卷积,同时要保存cache,后面backward会用到
- 第二行是relu
- 第三行是max_pool
- 第四行是affine_relu,把affine和relu同时做了,当然分开也是可以的。
- 第五行是affine
if y is None:
return scores接下来判断y是否None【也就是test还是train阶段】
2. backwoard
loss, dscores = softmax_loss(scores, y)
loss += 0.5 * self.reg*(np.sum(self.params['W1']* self.params['W1'])
+ np.sum(self.params['W2']* self.params['W2'])
+ np.sum(self.params['W3']* self.params['W3']))
affine2_dx, affine2_dw, affine2_db = affine_backward(dscores, affine2_cache)
grads['W3'] = affine2_dw + self.reg * self.params['W3']
grads['b3'] = affine2_db
affine1_dx, affine1_dw, affine1_db = affine_relu_backward(affine2_dx, affine_relu_cache)
grads['W2'] = affine1_dw + self.reg * self.params['W2']
grads['b2'] = affine1_db
pool_dx = max_pool_backward_fast(affine1_dx, pool_cache)
relu_dx = relu_backward(pool_dx, relu1_cache)
conv_dx, conv_dw, conv_db = conv_backward_fast(relu_dx, conv_cache)
grads['W1'] = conv_dw + self.reg * self.params['W1']
grads['b1'] = conv_db首先是调用softmax_loss函数
这个函数输入是最后一个affine的输出score和y计算出loss以及 ∂Loss/∂score
然后loss记得加上L2正则化的部分
接下来的步骤就非常”机械“和简单了。
我们之 需要把forward的每个函数调用对应的back函数,
比如我们最后一句forward是:
affine2_out, affine2_cache = affine_forward(affine_relu_out, W3, b3)那么对应的backward就是:
affine2_dx, affine2_dw, affine2_db = affine_backward(dscores, affine2_cache)基本的”模板“就是
out, cache=xxx_forward(x,y,z)
dx,dy,dz=xxx_backward(dout, cache)这里就不一一赘述细节了,有了dx,那么就可以把它保存到grads[‘x’]里,注意weight有正则化项 reg∗x2 ,所以对x求导后还剩下 2∗reg∗x,也要记得更新到grad[‘x’]里去。
5.10 cell13-14 sanity check和gradient check
我们的代码写完了,怎么验证forward和backward呢?我们知道可以用数值梯度来验证梯度,所以这个还比较容易验证,那么forwar呢?之前的作业老师都准备好了一下单元测试的例子,给定x和y,我们实现的forward就是要通过x计算出y来。
但是如果我们自己设计一个网络,没有”参考答案”怎么验证呢?当然没法绝对的验证,但是可以做“sanity check”。什么意思?对于随机初始化的参数,我们让模型来分类,那么它应该是“乱猜”的,比如分类数是10,那么它分类的准确率应该是10%,loss应该是log(10)。当然reg不等于0,loss会更大一些。
因此运行cell13的结果类似下面的结果:
Initial loss (no regularization): 2.30258612067
Initial loss (with regularization): 2.50896273286运行cell14:
W1 max relative error: 9.816730e-05
W2 max relative error: 3.816233e-03
W3 max relative error: 2.890462e-05
b1 max relative error: 6.426752e-05
b2 max relative error: 1.000000e+00
b3 max relative error: 1.013546e-09关于gradient check。尽量用float64,因为32位浮点数的舍入误差会比较明显。另外就是复杂的网络最好分解成小的网络单个验证。后面我在实现VGG的网络时就发现如果网络非常深,数值梯度和我们计算的差别很大,我当时写完之后check不过,后来调试了半天也没发现问题,后来我把VGG简化成几层的网络,就能通过gradient check了。此外数值梯度的h也可能影响数值梯度。
5.11 cell15-16 拟合少量数据
为了验证我们的代码是否work,我们可以先用很少的训练数据来测试。模型应该要得到很高的训练数据上的准确率【当然测试数据会很低】
下面是测试的结果:
(Epoch 9 / 10) train acc: 0.790000; val_acc: 0.205000
(Iteration 19 / 20) loss: 0.659042
(Iteration 20 / 20) loss: 0.712001
(Epoch 10 / 10) train acc: 0.820000; val_acc: 0.225000下面是训练和验证数据上的准确率图

5.12 cell17
在所有训练数据上训练,期望得到40%以上的分类准确率。
(Iteration 941 / 980) loss: 1.359960
(Iteration 961 / 980) loss: 1.461109
(Epoch 1 / 1) train acc: 0.476000; val_acc: 0.4700005.13 cell18 可视化训练的特征
代码作业已经提供,有兴趣的读者可以阅读怎么可视化的代码。
下面是结果:
5.14 cell19 Spatial Batch Normalization
前面我们实现了Batch Normalization。但是怎么把它用到卷积层呢?对于全连接层,我们对每一个激活函数的输入单独进行batch normalization。对于卷积层,它的输入是C × H × W 的图像,我们需要对一个Channel的图像进行batch normalization。
5.14.1 forward
def spatial_batchnorm_forward(x, gamma, beta, bn_param):
Inputs:
- x: 输入数据shape (N, C, H, W)
- gamma: scale参数 shape (C,)
- beta: 平移参数 shape (C,)
- bn_param: Dictionary包括:
- mode: 'train' 或者 'test'; 必须有的
- eps: 保持数值计算稳定的一个很小的常量
- momentum: 计算running mean/variance的常量,前面也讲过。
如果momentum=0 那么每次都丢弃原来的值,只用当前最新值。
momentum=1 表示只用原来的值。默认0.9,大部分情况下不用修改
- running_mean: 数组 shape (D,) 保存当前的均值
- running_var 数组 shape (D,) 保存当前的方差
Returns a tuple of:
- out: 输出数据 shape (N, C, H, W)
- cache: 用于backward的cache
"""
out, cache = None, None
#############################################################################
# TODO: Implement the forward pass for spatial batch normalization. #
# #
# HINT: You can implement spatial batch normalization using the vanilla #
# version of batch normalization defined above. Your implementation should #
# be very short; ours is less than five lines. #
#############################################################################
N, C, H, W = x.shape
temp_output, cache = batchnorm_forward(x.transpose(0,2,3,1).reshape((N*H*W,C)), gamma, beta, bn_param)
out = temp_output.reshape(N,H,W,C).transpose(0,3,1,2)
#############################################################################
# END OF YOUR CODE #
#############################################################################
return out, cache代码这样3行:
- 通过x.shape获得输入的N, C, H, W代表batchSize,Channel数,Height和Width
- 把(N, C, H, W)的4维tensor变成(N H W,C)的2维tensor。因为要把第二维C放到最后,所以首先transponse(0,2,3,1)把第二维放到第四维,然后原来的第三和四维分别变成第二和三维。然后在reshape成二维的(N H W, C)。这样就直接调用之前的batchnorm_forward。
transpose(0,2,3,1)的意思就是:把原来的第0维放到新的第0维【 不变】,把原来的第2维放到现在的第1维,把原来的第3维放到现在的第2维,把原来的第1维放到第3维。【主要这一段我说的时候下标是从0开始的了】 - 计算完成后我们需要把它恢复成(N, C, H, W)的4维tensor
运行这cell进行测试:
Before spatial batch normalization:
Shape: (2, 3, 4, 5)
Means: [ 10.55377221 10.73790598 9.53943534]
Stds: [ 3.78632253 3.62325432 3.74675181]
After spatial batch normalization:
Shape: (2, 3, 4, 5)
Means: [ 5.66213743e-16 -1.38777878e-16 7.43849426e-16]
Stds: [ 0.99999965 0.99999962 0.99999964]
After spatial batch normalization (nontrivial gamma, beta):
Shape: (2, 3, 4, 5)
Means: [ 6. 7. 8.]
Stds: [ 2.99999895 3.99999848 4.99999822]5.14.2 backward
和forward很类似
N,C,H,W = dout.shape
dx_temp, dgamma, dbeta = batchnorm_backward_alt(dout.transpose(0,2,3,1).reshape((N*H*W,C)),cache)
dx = dx_temp.reshape(N,H,W,C).transpose(0,3,1,2)下面是gradient check的结果:
dx error: 1.24124210224e-07
dgamma error: 1.440787364e-12
dbeta error: 1.19492399319e-115.15 实现一个validation数据上准确率超过65%的网络
这其实是一个开放的问题,这是一个很不错的问题。cifar10相对于mnist,分类数不变,但是分类难度要大不少。我们之前随便用一个3层的全连接网络就能实现95%以上的准确率,但是cifar10要实现这么高的准确率就不容易了。另一方面,相对于imagenet百万的训练数据,cifar的训练数据量只有50000,即使用十几层的卷积网络,在笔记本上训练几个小时也就收敛了。而训练imagenet即使用GPU也需要好几天才能收敛。所以用这个数据集来练手是个不错的选择。目前ResNet和Inception v4【不懂的读者不要着急,后面我们会简单的介绍它的思想,自己实现这种网络也不难】在这个数据上都能到95%以上的准确率。作业让我们达到65%的要求不算很高,读者可以尝试不同的网络层数,不同的dropout和learning_rate。
下面是我的一些调参经验:
- learning_rate非常重要,刚开始要大,之后用lr_decay让它变小。如果发现开始loss下降很慢,那么可以调大这个参数。如果loss时而变大时而变小【当然偶尔反复是正常的】,那么可能是learning_rate过大了。
- 最原始的sgd效果不好,最好用adam或者rmsprop再加上momentum
- 如果训练准确率和验证准确率差距过大,说明模型过拟合了,可以增大L2正则化参数reg,另外使用dropout也是可以缓解过拟合的。
- batch norm非常有用,尽量使用
- 越深的网络效果越好,当然要求的参数也越多,计算也越慢。后面我们会介绍一些使得我们可以训练更深网络的方法,比如著名的152层的ResNet以及参数很少的Inception系列算法,这些方法是最近一两年在ImageNet上名列前茅。
我这里就介绍VGG网络结构,原文为 Very Deep Convolutional Networks for Large-Scale Image Recognition 。这种网络结构很简单,LSVRC14的比赛上取得了很好的成绩。这一年另外一个比较好的是GoogLeNet,也就是inception v1。LSVRC15上的冠军就是ResNet,之后inception发展到v2/3(v2和v3其实是一篇论文出来的)和v4。这基本就是Image Classification比较state of the art的一些方法了。后面我们会简单的介绍ResNet和Inception的基本思想,这里我们先介绍VGG和它的实现方法。
1. VGG简介
VGG其实也没有什么的新东西,就是使用3 × 3的卷积和pooling实现比较深(16-19)层【当然ResNet出来后就不敢说自己深了】的网络结构。
VGG的结构如下图:
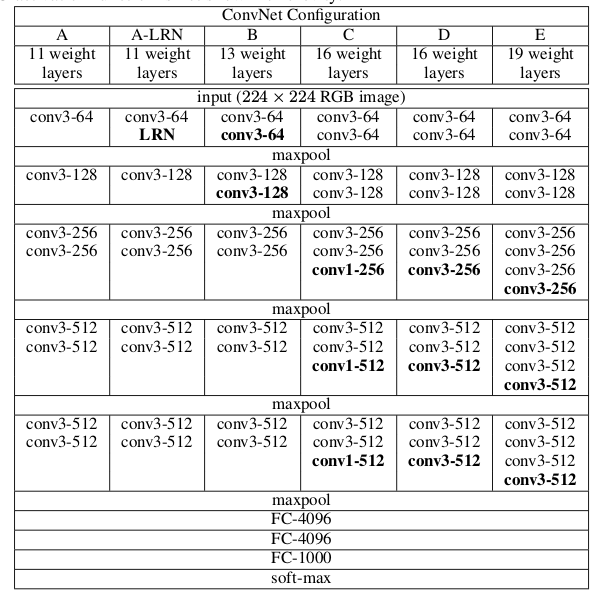
它的特点是:
所有的卷积都是 3×3,padding是1,stride是1,这样保证卷积后图像的大小不变,把几个filter数量一样的几个conv-relu合成一组,最后再用pooling把图像大小减半,图像大小减半之后一般就会增加filter的数量。最后接几个全连接层,最后一层是softmax。
我这里用我们已有的基础代码简单的实现了一个支持batch normalization和dropout的VGG,代码细节就不赘述了,有兴趣的读者可以参考代码。
class VGGlikeConvNet(object):
"""
A flexible convolutional network with the following architecture:
[(CONV-SBN-RELU)*A-POOL]*B - (FC-BN-RELU)*K - SOFTMAX
The network operates on minibatches of data that have shape (N, C, H, W)
consisting of N images, each with height H and width W and with C input
channels.
"""
def __init__(self, input_dim=(3, 32, 32), num_filters=[64, 128, 256, 512, 512], filter_size=3,
hidden_dims=[1024, 1024], num_classes=10, weight_scale=1e-2, reg=1e-3,
As=[2,2,3,3,3],use_batchnorm=True,
dropout=0, dtype=np.float32, seed=None):
"""
Inputs:
- input_dim: Tuple (C, H, W) giving size of input data
- num_filters: A list of integers giving the filters to use in each "MAIN" convolutional layer
- filter_size: Size of filters to use in the convolutional layer
- hidden_dim: A list of integers giving the size of each hidden layer.
- num_classes: Number of scores to produce from the final affine layer.
- weight_scale: Scalar giving standard deviation for random initialization
of weights.
- reg: Scalar giving L2 regularization strength
- As: Numbers of "SUB" convolution-layer replications in each num_filter
- dtype: numpy datatype to use for computation.
"""
self.params = {}
self.reg = reg
self.dtype = dtype
self.use_dropout = dropout > 0
self.use_batchnorm = use_batchnorm
self.filter_size=filter_size
self.hidden_dims=hidden_dims
C, H, W = input_dim
self.num_filters=num_filters
self.As=As
# With batch normalization we need to keep track of running means and
# variances, so we need to pass a special bn_param object to each batch
# normalization layer. You should pass self.bn_params[0] to the forward pass
# of the first batch normalization layer, self.bn_params[1] to the forward
# pass of the second batch normalization layer, etc.
self.bn_params = {}
for i in range(1, len(num_filters)+1):
num_filter=num_filters[i-1]
for j in range(1, As[i-1]+1):
#debug
ss=str(i)+","+str(j)
print (H,W,C, num_filter, filter_size, filter_size)
self.params['W' + ss] = np.random.normal(0, weight_scale,
(num_filter, C, filter_size, filter_size))
self.params['b' + ss] = np.zeros(num_filter)
C=num_filter
if self.use_batchnorm:
self.params['beta' + ss] = np.zeros(num_filter)
self.params['gamma'+ ss]=np.ones(num_filter)
self.bn_params[ss]={'mode': 'train'}
#max-pooling size/=2
H/=2
W/=2
# full connected layers
for i in range(1, len(hidden_dims)+1):
layer_input_dim = C*H*W if i == 1 else hidden_dims[i - 2]
layer_output_dim = hidden_dims[i - 1]
print (layer_input_dim, layer_output_dim)
self.params['W' + str(i)] = np.random.normal(0, weight_scale, (layer_input_dim, layer_output_dim))
self.params['b' + str(i)] = np.zeros(layer_output_dim)
if self.use_batchnorm:
self.params['beta' + str(i)] = np.zeros(layer_output_dim)
self.params['gamma' + str(i)] = np.ones(layer_output_dim)
self.bn_params[str(i)]={'mode': 'train'}
# softmax layer
softmax_input_dim=hidden_dims[-1]
softmax_output_dim=num_classes
print (softmax_input_dim, softmax_output_dim)
self.params['W_softmax'] = np.random.normal(0, weight_scale, (softmax_input_dim, softmax_output_dim))
self.params['b_softmax'] = np.zeros(softmax_output_dim)
self.dropout_param = {}
if self.use_dropout:
self.dropout_param = {'mode': 'train', 'p': dropout}
if seed is not None:
self.dropout_param['seed'] = seed
# Cast all parameters to the correct datatype
for k, v in self.params.iteritems():
self.params[k] = v.astype(dtype)
def loss(self, X, y=None):
"""
Compute loss and gradient for the fully-connected net.
Input / output: Same as TwoLayerNet above.
"""
X = X.astype(self.dtype)
mode = 'test' if y is None else 'train'
# Set train/test mode for batchnorm params and dropout param since they
# behave differently during training and testing.
if self.dropout_param is not None:
self.dropout_param['mode'] = mode
if self.use_batchnorm:
for bn_param in self.bn_params:
self.bn_params[bn_param]['mode'] = mode
scores = None
conv_caches={}
relu_caches={}
bn_caches={}
affine_relu_caches={}
affine_bn_relu_caches={}
dropout_caches={}
pool_caches={}
conv_param = {'stride': 1, 'pad': (self.filter_size - 1) / 2}
# pass pool_param to the forward pass for the max-pooling layer
pool_param = {'pool_height': 2, 'pool_width': 2, 'stride': 2}
current_input = X
# conv layers
for i in range(1, len(self.num_filters)+1):
for j in range(1, self.As[i-1]+1):
ss=str(i) + "," +str(j)
keyW = 'W' + ss
keyb = 'b' + ss
if not self.use_batchnorm:
conv_out, conv_cache = conv_forward_fast(current_input, self.params[keyW], self.params[keyb], conv_param)
relu_out, relu_cache = relu_forward(conv_out)
conv_caches[ss]=conv_cache
relu_caches[ss]=relu_cache
current_input=relu_out
else:
key_gamma = 'gamma' + ss
key_beta = 'beta' + ss
conv_out, conv_cache = conv_forward_fast(current_input, self.params[keyW], self.params[keyb], conv_param)
bn_out, bn_cache=spatial_batchnorm_forward(conv_out, self.params[key_gamma], self.params[key_beta], self.bn_params[ss])
relu_out, relu_cache = relu_forward(bn_out)
conv_caches[ss] = conv_cache
relu_caches[ss] = relu_cache
bn_caches[ss] = bn_cache
current_input = relu_out
pool_out, pool_cache = max_pool_forward_fast(current_input, pool_param)
pool_caches[str(i)]=pool_cache
current_input=pool_out
# full connected layers
for i in range(1, len(self.hidden_dims) + 1):
keyW = 'W' + str(i)
keyb = 'b' + str(i)
if not self.use_batchnorm:
current_input, affine_relu_caches[i] = affine_relu_forward(current_input, self.params[keyW], self.params[keyb])
else:
key_gamma = 'gamma' + str(i)
key_beta = 'beta' + str(i)
current_input, affine_bn_relu_caches[i] = affine_bn_relu_forward(current_input, self.params[keyW],
self.params[keyb],
self.params[key_gamma], self.params[key_beta],
self.bn_params[str(i)])
if self.use_dropout:
current_input, dropout_caches[i] = dropout_forward(current_input, self.dropout_param)
# softmax
keyW = 'W_softmax'
keyb = 'b_softmax'
affine_out, affine_cache = affine_forward(current_input, self.params[keyW], self.params[keyb])
scores=affine_out
# If test mode return early
if mode == 'test':
return scores
loss, grads = 0.0, {}
loss, dscores = softmax_loss(scores, y)
# last layer:
affine_dx, affine_dw, affine_db = affine_backward(dscores, affine_cache)
grads['W_softmax'] = affine_dw + self.reg * self.params['W_softmax']
grads['b_softmax'] = affine_db
loss += 0.5 * self.reg * (np.sum(self.params['W_softmax'] * self.params['W_softmax']))
# full connected layers
for i in range(len(self.hidden_dims), 0, -1):
if self.use_dropout:
affine_dx = dropout_backward(affine_dx, dropout_caches[i])
if not self.use_batchnorm:
affine_dx, affine_dw, affine_db = affine_relu_backward(affine_dx, affine_relu_caches[i])
else:
affine_dx, affine_dw, affine_db, dgamma, dbeta = affine_bn_relu_backward(affine_dx, affine_bn_relu_caches[i])
grads['beta' + str(i)] = dbeta
grads['gamma' + str(i)] = dgamma
keyW = 'W' + str(i)
keyb = 'b' + str(i)
loss += 0.5 * self.reg * (np.sum(self.params[keyW] * self.params[keyW]))
grads[keyW] = affine_dw + self.reg * self.params[keyW]
grads[keyb] = affine_db
# conv layers
conv_dx=affine_dx
for i in range(len(self.num_filters), 0, -1):
dpool_out=conv_dx
conv_dx=max_pool_backward_fast(dpool_out, pool_caches[str(i)])
for j in range(self.As[i-1],0,-1):
ss=str(i) + "," +str(j)
keyW = 'W' + ss
keyb = 'b' + ss
if not self.use_batchnorm:
drelu_out=conv_dx
relu_cache=relu_caches[ss]
conv_cache=conv_caches[ss]
dconv_out=relu_backward(drelu_out, relu_cache)
conv_dx, conv_dw, conv_db=conv_backward_fast(dconv_out, conv_cache)
loss += 0.5 * self.reg * (np.sum(self.params[keyW] * self.params[keyW]))
grads[keyW] = conv_dw + self.reg * self.params[keyW]
grads[keyb] = conv_db
else:
key_gamma = 'gamma' + ss
key_beta = 'beta' + ss
drelu_out = conv_dx
relu_cache = relu_caches[ss]
conv_cache = conv_caches[ss]
bn_cache=bn_caches[ss]
dbn_out = relu_backward(drelu_out, relu_cache)
dconv_out, dgamma, dbeta=spatial_batchnorm_backward(dbn_out, bn_cache)
grads[key_beta] = dbeta
grads[key_gamma] = dgamma
conv_dx, conv_dw, conv_db = conv_backward_fast(dconv_out, conv_cache)
loss += 0.5 * self.reg * (np.sum(self.params[keyW] * self.params[keyW]))
grads[keyW] = conv_dw + self.reg * self.params[keyW]
grads[keyb] = conv_db
############################################################################
# END OF YOUR CODE #
############################################################################
return loss, grads2. 使用VGG完成作业
我没有使用太深的VGG,因为是在笔记本上跑,参数也没有仔细调过,跑了一下可以得到85%以上的准确率,有兴趣的读者可以自己调调网络层数和超参数,应该是有可能得到90%以上准确率的
model = VGGlikeConvNet(input_dim=(3, 32, 32), num_filters=[64, 64, 128, 256], filter_size=3,
hidden_dims=[64, 64], num_classes=10, weight_scale=1e-2, reg=1e-3, As=[2,2,3,3],
dropout=0.2,
dtype=np.float32)
solver=Solver(model, data,
num_epochs=10, batch_size=50,
update_rule='adam',
lr_decay=0.95,
optim_config={'learning_rate': 5e-4},
verbose=True, print_every=20)
solver.train()下面是结果:
(Iteration 9741 / 9800) loss: 0.733453
(Iteration 9761 / 9800) loss: 0.645659
(Iteration 9781 / 9800) loss: 0.564387
(Epoch 10 / 10) train acc: 0.927000; val_acc: 0.854000本篇文章就到这里,在下一篇文章中,我将使用caffe在imagnet上训练AlexNet以及使用训练好的模型进行分类,敬请关注。

