计算摄影中的图像恢复
最近几年,有一个研究方向随着手机拍照的崛起而受到了越来越多的关注,也就是 computation photograph,中文翻译过来就叫计算摄影,顾名思义,计算摄影,就是计算+摄影,因为手机受到各种硬件的约束和限制,和单反比,不可能有更大的镜头,更大的 sensor,更灵活的变焦系统,所以为了提升手机摄影的效果,就需要依赖更好的算法,这就是计算摄影的由来,各大厂商,都在硬件的基础上,深挖自己的算法能力,以便让手机摄影的效果更好,更真实。
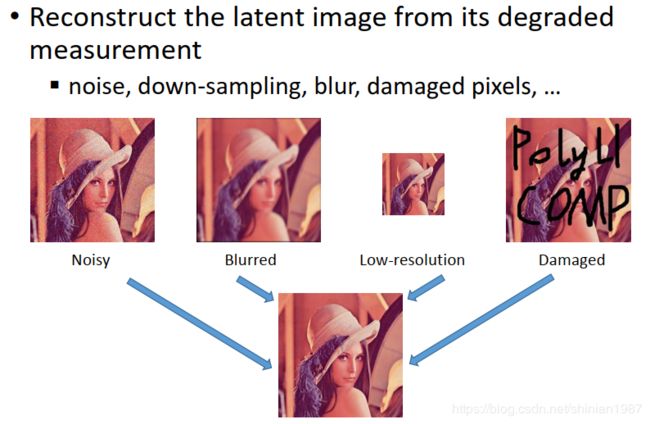
在计算摄影中,以一类问题是最常见的,也就是我们所说的图像恢复问题,我们知道虽然镜头结合sensor模拟的是人的视觉成像系统,但是与人眼的视觉成像相比,现在的硬件可能还达不到那么好的成像质量,所以一般情况下,sensor 捕获的信息,与人眼直接看到的信息相比,是存在一定的退化的,图像恢复算法,就是要把退化的图像质量提升,比如下图所示:
- 插入图片
常见的质量退化,比如噪声,模糊,低分辨率或者图像块的缺失等等。
在图像恢复模型中,我们一般会建立如下的成像模型:
y = T x + n \mathbf{y} = \mathcal{T} \mathbf{x} + \mathbf{n} y=Tx+n
其中 y \mathbf{y} y 是观测到的质量退化的图像, x \mathbf{x} x 是我们想要恢复的图像, n \mathbf{n} n 表示噪声, T \mathcal{T} T 表示成像的退化过程,由于噪声,光照以及其它因素的干扰, y \mathbf{y} y 的质量相比于 x \mathbf{x} x 要下降很多,我们在已知 y \mathbf{y} y 的情况下,要恢复出 x \mathbf{x} x,这是一个典型的逆问题,一般来说不存在一个精确的解析解,只能通过优化的方法求得近似解。
T \mathcal{T} T 一般来说是一个很庞大的矩阵,如果我们能够估计出 T \mathcal{T} T 的值或者说分布,那么我们就能恢复出 x \mathbf{x} x,不同的情况下, T \mathcal{T} T 表示的含义不同,在噪声成像模型中, T \mathcal{T} T 可以认为是一个单位矩阵,我们要做的就是把 n \mathbf{n} n 去掉,在模糊成像中, T \mathcal{T} T 可以看成是一个模糊核构成的矩阵,在低分辨率的情况下, T \mathcal{T} T 可以认为是一个降采样矩阵再加一个模糊矩阵的乘积,如果是 inpainting 的情况,那么 T \mathcal{T} T 就类似一个 0-1 构成的 mask。
一般求解这类问题的优化函数,都可以写成下面类似的方程:
x ∗ = min x E ( x ; y ) + R ( x ) \mathbf{x}^* = \min_{\mathbf{x}} E(\mathbf{x}; \mathbf{y}) + R(\mathbf{x}) x∗=xminE(x;y)+R(x)
x ∗ \mathbf{x}^* x∗ 就是我们想要求得的最优解, E ( x ; y ) E(\mathbf{x}; \mathbf{y}) E(x;y) 表示和任务相关的一个优化函数,一般是一个能量函数, R ( x ) R(\mathbf{x}) R(x) 一般是约束项,或者称为先验项,要很好的解决图像恢复问题,需要满足三个条件:
- 构建一个好的成像模型
- 构造一个好的先验
- 构造一个好的目标函数
字典学习 Dictionary learning
在深度学习兴起之前,图像恢复问题一般都是基于一种稀疏表示的方法来解决,这种方法是把 R ( x ) R(\mathbf{x}) R(x) 用一个字典来表示,
x = D α \mathbf{x} = D \alpha x=Dα
通过对 α \alpha α 进行约束,可以将如下的优化目标函数:
min x ∣ ∣ T x − y ∣ ∣ 2 2 + R ( x ) \min_{\mathbf{x}} || \mathcal{T} \mathbf{x} - \mathbf{y} ||_{2}^2 + R(\mathbf{x}) xmin∣∣Tx−y∣∣22+R(x)
转化成如下的形式:
min x ∣ ∣ T D α − y ∣ ∣ 2 2 + λ ∣ ∣ α ∣ ∣ 1 \min_{\mathbf{x}} || \mathcal{T} D \alpha - \mathbf{y} ||_2^2 + \lambda ||\alpha||_1 xmin∣∣TDα−y∣∣22+λ∣∣α∣∣1
这样,求解 x \mathbf{x} x 就变成求解 α \alpha α 了。
在实际的求解过程中,先将一张图像拆分成多个有 overlap 的 patch,然后对分别对每个 patch,用上面的优化表达式来求解 α \alpha α,求解出 α \alpha α 之后,可以对某个 patch 进行重建:
x ^ = D α ^ \hat{\mathbf{x}} = D \hat{\alpha} x^=Dα^
将重构的多个 patch 再拼成一幅完整的图像。一般来说,我们希望 α \alpha α 是稀疏的,而字典 D D D 则是 over complete,如果我们将 x \mathbf{x} x 看成是一个列向量, D D D 看成是一个矩阵,每一列可以看成是与 x \mathbf{x} x相似的向量, α \alpha α 则表示矩阵 D D D 的列向量的系数,这样表示的好处,就是我们可以通过学习一个字典,表示很多不同的 patch,假设 x \mathbf{x} x 是一个 N 维的列向量, α \alpha α 是一个 K K K 维的列向量, D D D 是一个 N × D N \times D N×D 的矩阵,如果 $ K << N$,也就是说如果 K K K 远远小于 N N N 那么我们就可以认为 α \alpha α 是一个稀疏的表示,因为 D D D 是公用的,而 α \alpha α 是和当前要求的 x \mathbf{x} x 相关的,稀疏表示,可以让模型用少量的 α \alpha α 去重构一个 patch,为了让 α \alpha α 稀疏,意味着字典 D D D 的表达能力要足够强,理想情况下,最好字典只用几个列向量的组合,就可以重构出 x \mathbf{x} x,为了提升字典 D D D 的表达能力,一般都是通过字典学习的方法来构建字典。
除了字典学习,Low-rank minimization 也是图像恢复中比较常用的一种方法,一幅好的自然图像如果看成矩阵的话,一般来说都是低秩的,因为自然图像里的结构信息有很大的冗余和相关性,
低秩与稀疏:低秩是指矩阵的秩较小,稀疏是指矩阵中非零元素的个数少。如果对矩阵进行奇异值分解,并把其所有奇异值排列为一个向量,那么这个向量的稀疏性便对应于该矩阵的低秩性。
Deep learing 与图像恢复
随着深度学习的流行,图像恢复领域也开始越来越多的结合深度学习来实现图像恢复,基于深度学习的图像恢复,就是通过大量的训练样本对学习一个紧凑的映射函数,
m i n Θ L ( x ^ , x ) s . t . x ^ = F ( y , H , Θ ) min_{\Theta} L(\hat{x}, x) \quad s.t. \quad \hat{x} = F(y, H, \Theta) minΘL(x^,x)s.t.x^=F(y,H,Θ)
- x ^ , x \hat{x}, x x^,x 可以看成是训练数据对,分别对应网络的输入,输出
- F F F 可以看成是函数形式,或者说神经网络的结构
- Θ \Theta Θ 表示函数的参数,或者说神经网络的参数
- L L L 表示loss 函数
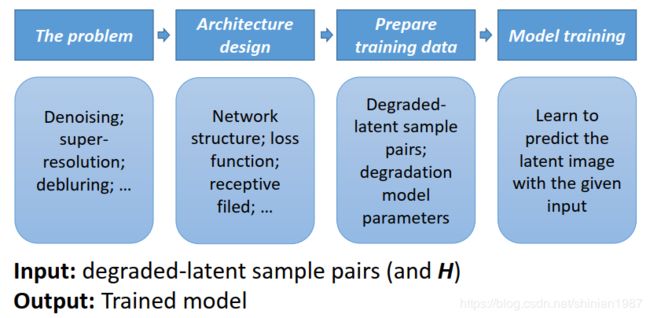
基于深度学习的图像恢复流程一般如下图所示:
- 插入图片
训练的过程包括构造训练数据,设计网络结构,设计 loss 函数,调试模型,进行训练
深度学习的图像恢复,就是通过大数据,让模型自己去学习大量图像的纹理结构,基于深度学习的图像恢复现在已经越来越成为主流方法了,目前各个榜单上,最好的性能都是基于深度学习的方法来实现的。
实现形式也多种多样,从一开始的普通多层卷积,到后来的 residual block 架构,再到后来融入 GAN 模型,loss 的设计也越来越精细,一开始只考虑最小均方误差,后来融入了 perceptual loss,以及 GAN loss。
虽然基于深度学习的图像恢复方法层出不穷,不过基于学习的图像恢复,最关键的一个问题就是训练数据的构建,特别是针对真实场景的图像恢复,目前学术界,构建训练数据的方式主要还是仿真,模拟图像退化的过程,但是真实场景的图像退化非常复杂,大多数情况下,只能拿到低质量的图像,而高质量的图像一般是不存在的,所以对于真实场景来说,如何构建训练数据,是深度学习能否有效的关键。