Image manipulation and processing using Numpy and Scipy
看文档和别人的例子应该是学习的一个办法;
http://scipy-lectures.github.io/advanced/image_processing/
| authors: | Emmanuelle Gouillart, Gaël Varoquaux |
|---|
This chapter addresses basic image manipulation and processing using the core scientific modules NumPy and SciPy. Some of the operations covered by this tutorial may be useful for other kinds of multidimensional array processing than image processing. In particular, the submodule scipy.ndimage provides functions operating on n-dimensional NumPy arrays.
See also
For more advanced image processing and image-specific routines, see the tutorial Scikit-image: image processing, dedicated to the skimagemodule.
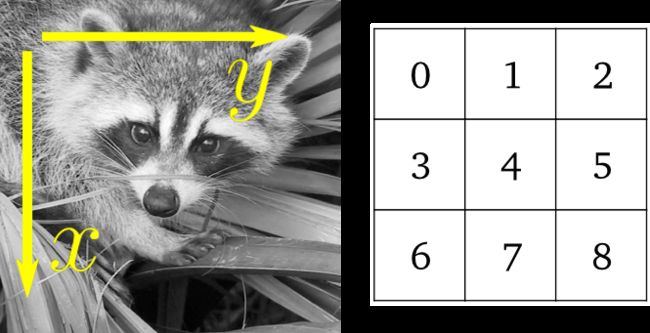
Image = 2-D numerical array
(or 3-D: CT, MRI, 2D + time; 4-D, ...)
Here, image == Numpy array np.array
Tools used in this tutorial:
-
numpy: basic array manipulation
-
scipy: scipy.ndimage submodule dedicated to image processing (n-dimensional images). Seehttp://docs.scipy.org/doc/scipy/reference/tutorial/ndimage.html
>>> from scipy import ndimage
Common tasks in image processing:
- Input/Output, displaying images
- Basic manipulations: cropping, flipping, rotating, ...
- Image filtering: denoising, sharpening
- Image segmentation: labeling pixels corresponding to different objects
- Classification
- Feature extraction
- Registration
- ...
More powerful and complete modules:
- OpenCV (Python bindings)
- CellProfiler
- ITK with Python bindings
- many more...
Chapters contents
- Opening and writing to image files
- Displaying images
- Basic manipulations
- Statistical information
- Geometrical transformations
- Image filtering
- Blurring/smoothing
- Sharpening
- Denoising
- Mathematical morphology
- Feature extraction
- Edge detection
- Segmentation
- Measuring objects properties: ndimage.measurements
2.6.1. Opening and writing to image files
Writing an array to a file:
from scipy import misc
l = misc.lena()
misc.imsave('lena.png', l) # uses the Image module (PIL)
import matplotlib.pyplot as plt
plt.imshow(l)
plt.show()
Creating a numpy array from an image file:
>>> from scipy import misc
>>> lena = misc.imread('lena.png')
>>> type(lena)
dtype is uint8 for 8-bit images (0-255)
Opening raw files (camera, 3-D images)
>>> l.tofile('lena.raw') # Create raw file
>>> lena_from_raw = np.fromfile('lena.raw', dtype=np.int64)
>>> lena_from_raw.shape
(262144,)
>>> lena_from_raw.shape = (512, 512)
>>> import os
>>> os.remove('lena.raw')
Need to know the shape and dtype of the image (how to separate data bytes).
For large data, use np.memmap for memory mapping:
>>> lena_memmap = np.memmap('lena.raw', dtype=np.int64, shape=(512, 512))
(data are read from the file, and not loaded into memory)
Working on a list of image files
>>> for i in range(10):
... im = np.random.random_integers(0, 255, 10000).reshape((100, 100))
... misc.imsave('random_%02d.png' % i, im)
>>> from glob import glob
>>> filelist = glob('random*.png')
>>> filelist.sort()
2.6.2. Displaying images
Use matplotlib and imshow to display an image inside a matplotlib figure:
>>> l = misc.lena()
>>> import matplotlib.pyplot as plt
>>> plt.imshow(l, cmap=plt.cm.gray)
Increase contrast by setting min and max values:
>>> plt.imshow(l, cmap=plt.cm.gray, vmin=30, vmax=200)
Draw contour lines:
>>> plt.contour(l, [60, 211])
[Python source code]
For fine inspection of intensity variations, use interpolation='nearest':
>>> plt.imshow(l[200:220, 200:220], cmap=plt.cm.gray)
>>> plt.imshow(l[200:220, 200:220], cmap=plt.cm.gray, interpolation='nearest')
[Python source code]
3-D visualization: Mayavi
See 3D plotting with Mayavi.
- Image plane widgets
- Isosurfaces
- ...
2.6.3. Basic manipulations
Images are arrays: use the whole numpy machinery.
>>> lena = scipy.misc.lena()
>>> lena[0, 40]
166
>>> # Slicing
>>> lena[10:13, 20:23]
array([[158, 156, 157],
[157, 155, 155],
[157, 157, 158]])
>>> lena[100:120] = 255
>>>
>>> lx, ly = lena.shape
>>> X, Y = np.ogrid[0:lx, 0:ly]
>>> mask = (X - lx / 2) ** 2 + (Y - ly / 2) ** 2 > lx * ly / 4
>>> # Masks
>>> lena[mask] = 0
>>> # Fancy indexing
>>> lena[range(400), range(400)] = 255
[Python source code]
2.6.3.1. Statistical information
>>> lena = misc.lena()
>>> lena.mean()
124.04678344726562
>>> lena.max(), lena.min()
(245, 25)
np.histogram
Exercise
- Open as an array the scikit-image logo (http://scikit-image.org/_static/scikits_image_logo.png), or an image that you have on your computer.
- Crop a meaningful part of the image, for example the python circle in the logo.
- Display the image array using matlplotlib. Change the interpolation method and zoom to see the difference.
- Transform your image to greyscale
- Increase the contrast of the image by changing its minimum and maximum values. Optional: use scipy.stats.scoreatpercentile (read the docstring!) to saturate 5% of the darkest pixels and 5% of the lightest pixels.
- Save the array to two different file formats (png, jpg, tiff)
2.6.3.2. Geometrical transformations
>>> lena = misc.lena()
>>> lx, ly = lena.shape
>>> # Cropping
>>> crop_lena = lena[lx / 4: - lx / 4, ly / 4: - ly / 4]
>>> # up <-> down flip
>>> flip_ud_lena = np.flipud(lena)
>>> # rotation
>>> rotate_lena = ndimage.rotate(lena, 45)
>>> rotate_lena_noreshape = ndimage.rotate(lena, 45, reshape=False)
[Python source code]
2.6.4. Image filtering
Local filters: replace the value of pixels by a function of the values of neighboring pixels.
Neighbourhood: square (choose size), disk, or more complicated structuring element.

2.6.4.1. Blurring/smoothing
Gaussian filter from scipy.ndimage:
>>> from scipy import misc
>>> lena = misc.lena()
>>> blurred_lena = ndimage.gaussian_filter(lena, sigma=3)
>>> very_blurred = ndimage.gaussian_filter(lena, sigma=5)
Uniform filter
>>> local_mean = ndimage.uniform_filter(lena, size=11)
[Python source code]
2.6.4.2. Sharpening
Sharpen a blurred image:
>>> from scipy import misc
>>> lena = misc.lena()
>>> blurred_l = ndimage.gaussian_filter(lena, 3)
increase the weight of edges by adding an approximation of the Laplacian:
>>> filter_blurred_l = ndimage.gaussian_filter(blurred_l, 1)
>>> alpha = 30
>>> sharpened = blurred_l + alpha * (blurred_l - filter_blurred_l)
[Python source code]
2.6.4.3. Denoising
Noisy lena:
>>> from scipy import misc
>>> l = misc.lena()
>>> l = l[230:310, 210:350]
>>> noisy = l + 0.4 * l.std() * np.random.random(l.shape)
A Gaussian filter smoothes the noise out... and the edges as well:
>>> gauss_denoised = ndimage.gaussian_filter(noisy, 2)
Most local linear isotropic filters blur the image (ndimage.uniform_filter)
A median filter preserves better the edges:
>>> med_denoised = ndimage.median_filter(noisy, 3)
[Python source code]
Median filter: better result for straight boundaries (low curvature):
>>> im = np.zeros((20, 20))
>>> im[5:-5, 5:-5] = 1
>>> im = ndimage.distance_transform_bf(im)
>>> im_noise = im + 0.2 * np.random.randn(*im.shape)
>>> im_med = ndimage.median_filter(im_noise, 3)
[Python source code]
Other rank filter: ndimage.maximum_filter, ndimage.percentile_filter
Other local non-linear filters: Wiener (scipy.signal.wiener), etc.
Non-local filters
Exercise: denoising
- Create a binary image (of 0s and 1s) with several objects (circles, ellipses, squares, or random shapes).
- Add some noise (e.g., 20% of noise)
- Try two different denoising methods for denoising the image: gaussian filtering and median filtering.
- Compare the histograms of the two different denoised images. Which one is the closest to the histogram of the original (noise-free) image?
2.6.4.4. Mathematical morphology
See http://en.wikipedia.org/wiki/Mathematical_morphology
Probe an image with a simple shape (a structuring element), and modify this image according to how the shape locally fits or misses the image.
Structuring element:
>>> el = ndimage.generate_binary_structure(2, 1)
>>> el
array([[False, True, False],
[ True, True, True],
[False, True, False]], dtype=bool)
>>> el.astype(np.int)
array([[0, 1, 0],
[1, 1, 1],
[0, 1, 0]])

Erosion = minimum filter. Replace the value of a pixel by the minimal value covered by the structuring element.:
>>> a = np.zeros((7,7), dtype=np.int)
>>> a[1:6, 2:5] = 1
>>> a
array([[0, 0, 0, 0, 0, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 0, 0, 0, 0, 0]])
>>> ndimage.binary_erosion(a).astype(a.dtype)
array([[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0]])
>>> #Erosion removes objects smaller than the structure
>>> ndimage.binary_erosion(a, structure=np.ones((5,5))).astype(a.dtype)
array([[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0]])
Dilation: maximum filter:
>>> a = np.zeros((5, 5))
>>> a[2, 2] = 1
>>> a
array([[ 0., 0., 0., 0., 0.],
[ 0., 0., 0., 0., 0.],
[ 0., 0., 1., 0., 0.],
[ 0., 0., 0., 0., 0.],
[ 0., 0., 0., 0., 0.]])
>>> ndimage.binary_dilation(a).astype(a.dtype)
array([[ 0., 0., 0., 0., 0.],
[ 0., 0., 1., 0., 0.],
[ 0., 1., 1., 1., 0.],
[ 0., 0., 1., 0., 0.],
[ 0., 0., 0., 0., 0.]])
Also works for grey-valued images:
>>> np.random.seed(2)
>>> x, y = (63*np.random.random((2, 8))).astype(np.int)
>>> im[x, y] = np.arange(8)
>>> bigger_points = ndimage.grey_dilation(im, size=(5, 5), structure=np.ones((5, 5)))
>>> square = np.zeros((16, 16))
>>> square[4:-4, 4:-4] = 1
>>> dist = ndimage.distance_transform_bf(square)
>>> dilate_dist = ndimage.grey_dilation(dist, size=(3, 3), \
... structure=np.ones((3, 3)))
[Python source code]
Opening: erosion + dilation:
>>> a = np.zeros((5,5), dtype=np.int)
>>> a[1:4, 1:4] = 1; a[4, 4] = 1
>>> a
array([[0, 0, 0, 0, 0],
[0, 1, 1, 1, 0],
[0, 1, 1, 1, 0],
[0, 1, 1, 1, 0],
[0, 0, 0, 0, 1]])
>>> # Opening removes small objects
>>> ndimage.binary_opening(a, structure=np.ones((3,3))).astype(np.int)
array([[0, 0, 0, 0, 0],
[0, 1, 1, 1, 0],
[0, 1, 1, 1, 0],
[0, 1, 1, 1, 0],
[0, 0, 0, 0, 0]])
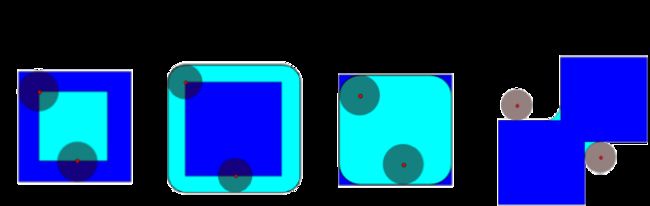
>>> # Opening can also smooth corners
>>> ndimage.binary_opening(a).astype(np.int)
array([[0, 0, 0, 0, 0],
[0, 0, 1, 0, 0],
[0, 1, 1, 1, 0],
[0, 0, 1, 0, 0],
[0, 0, 0, 0, 0]])
Application: remove noise:
>>> square = np.zeros((32, 32))
>>> square[10:-10, 10:-10] = 1
>>> np.random.seed(2)
>>> x, y = (32*np.random.random((2, 20))).astype(np.int)
>>> square[x, y] = 1
>>> open_square = ndimage.binary_opening(square)
>>> eroded_square = ndimage.binary_erosion(square)
>>> reconstruction = ndimage.binary_propagation(eroded_square, mask=square)
[Python source code]
Closing: dilation + erosion
Many other mathematical morphology operations: hit and miss transform, tophat, etc.
2.6.5. Feature extraction
2.6.5.1. Edge detection
Synthetic data:
>>> im = np.zeros((256, 256))
>>> im[64:-64, 64:-64] = 1
>>>
>>> im = ndimage.rotate(im, 15, mode='constant')
>>> im = ndimage.gaussian_filter(im, 8)
Use a gradient operator (Sobel) to find high intensity variations:
>>> sx = ndimage.sobel(im, axis=0, mode='constant')
>>> sy = ndimage.sobel(im, axis=1, mode='constant')
>>> sob = np.hypot(sx, sy)
[Python source code]
2.6.5.2. Segmentation
- Histogram-based segmentation (no spatial information)
>>> n = 10
>>> l = 256
>>> im = np.zeros((l, l))
>>> np.random.seed(1)
>>> points = l*np.random.random((2, n**2))
>>> im[(points[0]).astype(np.int), (points[1]).astype(np.int)] = 1
>>> im = ndimage.gaussian_filter(im, sigma=l/(4.*n))
>>> mask = (im > im.mean()).astype(np.float)
>>> mask += 0.1 * im
>>> img = mask + 0.2*np.random.randn(*mask.shape)
>>> hist, bin_edges = np.histogram(img, bins=60)
>>> bin_centers = 0.5*(bin_edges[:-1] + bin_edges[1:])
>>> binary_img = img > 0.5
[Python source code]
Use mathematical morphology to clean up the result:
>>> # Remove small white regions
>>> open_img = ndimage.binary_opening(binary_img)
>>> # Remove small black hole
>>> close_img = ndimage.binary_closing(open_img)
[Python source code]
Exercise
Check that reconstruction operations (erosion + propagation) produce a better result than opening/closing:
>>> eroded_img = ndimage.binary_erosion(binary_img)
>>> reconstruct_img = ndimage.binary_propagation(eroded_img, mask=binary_img)
>>> tmp = np.logical_not(reconstruct_img)
>>> eroded_tmp = ndimage.binary_erosion(tmp)
>>> reconstruct_final = np.logical_not(ndimage.binary_propagation(eroded_tmp, mask=tmp))
>>> np.abs(mask - close_img).mean()
0.014678955078125
>>> np.abs(mask - reconstruct_final).mean()
0.0042572021484375
Exercise
Check how a first denoising step (e.g. with a median filter) modifies the histogram, and check that the resulting histogram-based segmentation is more accurate.
See also
More advanced segmentation algorithms are found in the scikit-image: see Scikit-image: image processing.
See also
Other Scientific Packages provide algorithms that can be useful for image processing. In this example, we use the spectral clustering function of the scikit-learn in order to segment glued objects.
>>> from sklearn.feature_extraction import image
>>> from sklearn.cluster import spectral_clustering
>>> l = 100
>>> x, y = np.indices((l, l))
>>> center1 = (28, 24)
>>> center2 = (40, 50)
>>> center3 = (67, 58)
>>> center4 = (24, 70)
>>> radius1, radius2, radius3, radius4 = 16, 14, 15, 14
>>> circle1 = (x - center1[0])**2 + (y - center1[1])**2 < radius1**2
>>> circle2 = (x - center2[0])**2 + (y - center2[1])**2 < radius2**2
>>> circle3 = (x - center3[0])**2 + (y - center3[1])**2 < radius3**2
>>> circle4 = (x - center4[0])**2 + (y - center4[1])**2 < radius4**2
>>> # 4 circles
>>> img = circle1 + circle2 + circle3 + circle4
>>> mask = img.astype(bool)
>>> img = img.astype(float)
>>> img += 1 + 0.2*np.random.randn(*img.shape)
>>> # Convert the image into a graph with the value of the gradient on
>>> # the edges.
>>> graph = image.img_to_graph(img, mask=mask)
>>> # Take a decreasing function of the gradient: we take it weakly
>>> # dependant from the gradient the segmentation is close to a voronoi
>>> graph.data = np.exp(-graph.data/graph.data.std())
>>> labels = spectral_clustering(graph, k=4, mode='arpack')
>>> label_im = -np.ones(mask.shape)
>>> label_im[mask] = labels

2.6.6. Measuring objects properties:ndimage.measurements
Synthetic data:
>>> n = 10
>>> l = 256
>>> im = np.zeros((l, l))
>>> points = l*np.random.random((2, n**2))
>>> im[(points[0]).astype(np.int), (points[1]).astype(np.int)] = 1
>>> im = ndimage.gaussian_filter(im, sigma=l/(4.*n))
>>> mask = im > im.mean()
- Analysis of connected components
Label connected components: ndimage.label:
>>> label_im, nb_labels = ndimage.label(mask)
>>> nb_labels # how many regions?
23
>>> plt.imshow(label_im)
[Python source code]
Compute size, mean_value, etc. of each region:
>>> sizes = ndimage.sum(mask, label_im, range(nb_labels + 1))
>>> mean_vals = ndimage.sum(im, label_im, range(1, nb_labels + 1))
Clean up small connect components:
>>> mask_size = sizes < 1000
>>> remove_pixel = mask_size[label_im]
>>> remove_pixel.shape
(256, 256)
>>> label_im[remove_pixel] = 0
>>> plt.imshow(label_im)
Now reassign labels with np.searchsorted:
>>> labels = np.unique(label_im)
>>> label_im = np.searchsorted(labels, label_im)
[Python source code]
Find region of interest enclosing object:
>>> slice_x, slice_y = ndimage.find_objects(label_im==4)[0]
>>> roi = im[slice_x, slice_y]
>>> plt.imshow(roi)
[Python source code]
Other spatial measures: ndimage.center_of_mass, ndimage.maximum_position, etc.
Can be used outside the limited scope of segmentation applications.
Example: block mean:
>>> from scipy import misc
>>> l = misc.lena()
>>> sx, sy = l.shape
>>> X, Y = np.ogrid[0:sx, 0:sy]
>>> regions = sy/6 * (X/4) + Y/6 # note that we use broadcasting
>>> block_mean = ndimage.mean(l, labels=regions, index=np.arange(1,
... regions.max() +1))
>>> block_mean.shape = (sx/4, sy/6)
[Python source code]
When regions are regular blocks, it is more efficient to use stride tricks (Example: fake dimensions with strides).
Non-regularly-spaced blocks: radial mean:
>>> sx, sy = l.shape
>>> X, Y = np.ogrid[0:sx, 0:sy]
>>> r = np.hypot(X - sx/2, Y - sy/2)
>>> rbin = (20* r/r.max()).astype(np.int)
>>> radial_mean = ndimage.mean(l, labels=rbin, index=np.arange(1, rbin.max() +1))
[Python source code]
- Other measures
Correlation function, Fourier/wavelet spectrum, etc.
One example with mathematical morphology: granulometry(http://en.wikipedia.org/wiki/Granulometry_%28morphology%29)
>>> def disk_structure(n):
... struct = np.zeros((2 * n + 1, 2 * n + 1))
... x, y = np.indices((2 * n + 1, 2 * n + 1))
... mask = (x - n)**2 + (y - n)**2 <= n**2
... struct[mask] = 1
... return struct.astype(np.bool)
...
>>>
>>> def granulometry(data, sizes=None):
... s = max(data.shape)
... if sizes == None:
... sizes = range(1, s/2, 2)
... granulo = [ndimage.binary_opening(data, \
... structure=disk_structure(n)).sum() for n in sizes]
... return granulo
...
>>>
>>> np.random.seed(1)
>>> n = 10
>>> l = 256
>>> im = np.zeros((l, l))
>>> points = l*np.random.random((2, n**2))
>>> im[(points[0]).astype(np.int), (points[1]).astype(np.int)] = 1
>>> im = ndimage.gaussian_filter(im, sigma=l/(4.*n))
>>>
>>> mask = im > im.mean()
>>>
>>> granulo = granulometry(mask, sizes=np.arange(2, 19, 4))