webrtc的拥塞控制之trendline filter分析
首先说明,本文基于[1],这篇文章是由学霸君的工程师写的,但是有些小的错误。原作者直接将webrtc中的拥塞控制采用c重写了,代码见[2]。之前在网上也读过大牛的一些文章[3].
webrtc最早的拥塞控制算法分为两个部分,在发送端运行基于丢包的拥塞器,而在接收端部署基于时延的拥塞控制算法。数据包单向时延差信息(单向时延梯度),可以反映网络链路拥塞程度,可以参看原作者的论文[4]。早期的算法,采用kalman滤波获取网络拥塞信号,[5]有详细的分析。基于kalman滤波获取拥塞信号的方式,后来被废弃了。
拥塞控制的基本方法就是,发送端根据网络状态,动态改变发送速率,适配网络中的可用带宽。
数据帧 i i i的发送时刻,接收时刻分别是 T i , t i T_i, t_i Ti,ti。GCC[7]中建立的网络延迟模型为:
d m ( t i ) = ( t i − t i − 1 ) − ( T i − t T − 1 ) = Δ L ( t i ) C ( t i ) + m ( t i ) + n \begin{aligned} d_m(t_i)&=(t_i-t_{i-1})-(T_i-t_{T-1})\\ &=\frac{\Delta L(t_i)}{C(t_i)}+m(t_i)+n \end{aligned} dm(ti)=(ti−ti−1)−(Ti−tT−1)=C(ti)ΔL(ti)+m(ti)+n
kalman中的两个状态,由此可得:
θ = [ 1 C ( t i ) m ( t i ) ] \theta= \left[ \begin{matrix} \frac{1}{C(t_i)}\\ m(t_i) \end{matrix} \right] θ=[C(ti)1m(ti)]
[7]中有一系列的推导,用kalman的方式对这两个信号进行更新。其中, C ( t i ) C(t_i) C(ti)指的是瓶颈链路总的带宽,比如骨干网的带宽40Gbps,获取这个信号其实没啥意义。 m ( t i ) m(t_i) m(ti)反映的就是队列消涨情况。[4]就对状态方程进行了小小的更新。最早的L就是视频帧的大小,而后来更新为一段时间内(比如5ms)向网络中发送的数据量。这样两个时间段,收到的数据量,近似相等。于是 Δ L ( t i ) = 0 \Delta L(t_i)=0 ΔL(ti)=0,状态方程直接就退化为[4]:
d m ( t i ) = m ( t i ) + n d_m(t_i)=m(t_i)+n dm(ti)=m(ti)+n
依然是采用kalman的方式,根据测量值对实际值进行估计。这里的估计过程,实质上就是一个exponential filter。因为有一堆公式的包装,瞬间就显得高大上了。
webrtc将拥塞控制逻辑全部移到了发送端,另外采用trendline filter的方式获取网络拥塞信号,在博文[6]里有一些描述。方法变了,但是核心思想没有变化,通过观测网络链路中的排队队列的消涨情况,判断链路是否拥塞,进而调节速率。
[1]中有这样一段话,可以参考原文中的图例:
基于延迟的拥塞控制是通过每组包的到达时间的延迟差(delta delay)的增长趋势来判断网络是否过载,如果过载进行码率下调,如果处于平衡范围维持当前码率,如果是网络承载不饱满进行码率上调。这里有几个关键技术:包组延迟评估、滤波器趋势判断、过载检测和码率调节
其中重要的一点,根据5ms时间间隔对回馈的数据包分组,这个概念可以近似认为论文[7]中帧的概念。我很早就觉得以视频帧为单位的队列时延信息求解不合适,因为在视频传输中,I,P,B帧的差异很大,这样会引入误差。而基于时间段进行组的划分,要好很多,由于pacer的作用,在一小段时间内,可以认为数据包是均匀向外发送的,对网络状态进行观测。
feedback数据包到来后,接收端的处理函数:
void DelayBasedBwe::IncomingPacketFeedback(
const PacketFeedback& packet_feedback) {
if (inter_arrival_->ComputeDeltas(timestamp, packet_feedback.arrival_time_ms,
now_ms, packet_feedback.payload_size,
&ts_delta, &t_delta, &size_delta)) {
double ts_delta_ms = (1000.0 * ts_delta) / (1 << kInterArrivalShift);
trendline_estimator_->Update(t_delta, ts_delta_ms,
packet_feedback.arrival_time_ms);
detector_.Detect(trendline_estimator_->trendline_slope(), ts_delta_ms,
trendline_estimator_->num_of_deltas(),
packet_feedback.arrival_time_ms);
}
}
detector_.Detect(),计算网络的过载情况。trendline_estimator_->trendline_slope()获取回归方程的斜率。
组与组之间的时延信息计算如下:
*timestamp_delta =current_timestamp_group_.timestamp -prev_timestamp_group_.timestamp;
*arrival_time_delta_ms = current_timestamp_group_.complete_time_ms -prev_timestamp_group_.complete_time_ms;
//InterArrival::ComputeDeltas
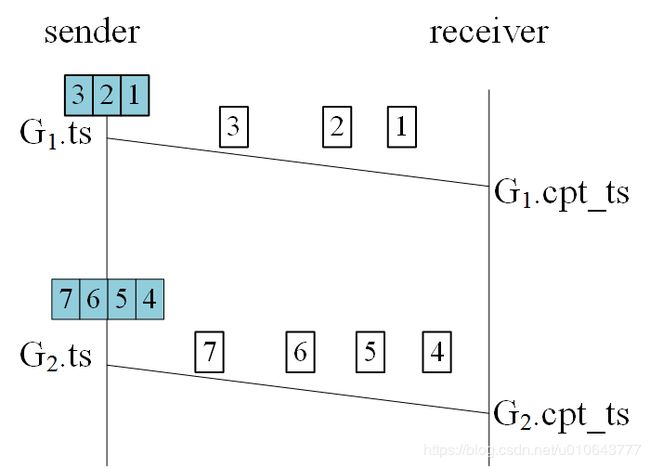
盗用[1]中的一个图,对上面两行代码进行解释。我对原有的图片进行修正,在发送端,pacer均匀地向网络注入数据包,但是经过中间的路由器,由于存在其他数据流的包,这些数据包之间的间隔就错落开来。
t i m e s t a m p _ d e l t a = G 2. t s − G 1. t s timestamp\_delta={G2.ts-G1.ts} timestamp_delta=G2.ts−G1.ts
a r r i v a l _ t i m e _ d e l t a _ m s = G 2. c p t _ t s − G 1. c p t _ t s arrival\_time\_delta\_ms={G2.cpt\_ts-G1.cpt\_ts} arrival_time_delta_ms=G2.cpt_ts−G1.cpt_ts
若数据包属于新的分组,则对trendline filter进行更新:
void TrendlineEstimator::Update(double recv_delta_ms,
double send_delta_ms,
int64_t arrival_time_ms) {
const double delta_ms = recv_delta_ms - send_delta_ms;//①
if (first_arrival_time_ms == -1)
first_arrival_time_ms = arrival_time_ms;
// Exponential backoff filter.
accumulated_delay_ += delta_ms;
smoothed_delay_ = smoothing_coef_ * smoothed_delay_ +
(1 - smoothing_coef_) * accumulated_delay_;
// Simple linear regression,表明trendline是线性回归。
delay_hist_.push_back(std::make_pair(
static_cast(arrival_time_ms - first_arrival_time_ms),smoothed_delay_)); //②
if (delay_hist_.size() == window_size_) {
// Only update trendline_ if it is possible to fit a line to the data.
trendline_ = LinearFitSlope(delay_hist_).value_or(trendline_);//③线性回归
}
}
Update函数中参数recv_delta_ms就是计算得到的arrival_time_delta_ms,而send_delta_ms就是arrival_time_delta_ms,arrival_time_ms就是本组内最后一个包的接收端到达时间G2.complete_time_ms。在网络链路排队的数据包在消减的情况,delta_ms值是可能为负的。
这段代码在[1]中有公式表示。其中代码中标号①计算的时间为相邻组的接收间隔与发送间隔的差值。
d ( i ) = ( G i . c p t _ t s − G i − 1 . c p t _ t s ) − ( G i . t s − G i − 1 . t s ) . . . . ( 3 ) d(i)=(G_i.cpt\_ts-G_{i-1}.cpt\_ts)-(G_i.ts-G_{i-1}.ts)....(3) d(i)=(Gi.cpt_ts−Gi−1.cpt_ts)−(Gi.ts−Gi−1.ts)....(3)
a c c _ d e l a y ( i ) = ∑ j = 1 i d ( j ) . . . . ( 4 ) acc\_delay(i)=\sum_{j=1}^{i}d(j)....(4) acc_delay(i)=∑j=1id(j)....(4)。
最后进行平滑计算,这是老套路了:
s m o o t h e d _ d e l a y _ ( i ) = s m o o t h i n g _ c o e f _ ∗ s m o o t h e d _ d e l a y _ ( i − 1 ) + ( 1 − s m o o t h i n g _ c o e f _ ) ∗ a c c _ d e l a y ( i ) . . . . ( 5 ) smoothed\_delay\_(i)=smoothing\_coef\_ * smoothed\_delay\_(i-1) +(1 - smoothing\_coef\_) * acc\_delay(i)....(5) smoothed_delay_(i)=smoothing_coef_∗smoothed_delay_(i−1)+(1−smoothing_coef_)∗acc_delay(i)....(5)
smoothed_delay_反映的就是数据包经由网络链路的排队时延信息,反映的是网络排队队列的消涨情况。重要的是,它最后储存的数据数在标号②,就是本分组的最后一个包的到达时刻与第一个分组到达时刻的差值(x轴),smoothed_delay_(y轴)。在标号③除,当收集到足够的数据的时候,对数据进行线性回归,求取曲线的斜率。这个数据的处理过程,就等效原论文[4]里中m值。
它的回归方程斜率的求解如下:
k = ∑ ( x i − x a v g ) ( y i − y a v g ) ∑ ( x i − x a v g ) 2 . . . . ( 6 ) k = \frac{\sum\nolimits(x_i-x_{avg})(y_i-y_{avg}) }{ \sum\nolimits(x_i-x_{avg})^2}....(6) k=∑(xi−xavg)2∑(xi−xavg)(yi−yavg)....(6)
rtc::Optional LinearFitSlope(
const std::deque>& points) {
RTC_DCHECK(points.size() >= 2);
// Compute the "center of mass".
double sum_x = 0;
double sum_y = 0;
for (const auto& point : points) {
sum_x += point.first;
sum_y += point.second;
}
double x_avg = sum_x / points.size();
double y_avg = sum_y / points.size();
// Compute the slope k = \sum (x_i-x_avg)(y_i-y_avg) / \sum (x_i-x_avg)^2
double numerator = 0;
double denominator = 0;
for (const auto& point : points) {
numerator += (point.first - x_avg) * (point.second - y_avg);
denominator += (point.first - x_avg) * (point.first - x_avg);
}
if (denominator == 0)
return rtc::Optional();
return rtc::Optional(numerator / denominator);
}
接收端,每间隔RemoteEstimatorProxy::kDefaultSendIntervalMs = 100ms,发送一次feedback报文。
但是根据我在ns3上的仿真结果[8],当可用带宽较高时,GCC不太稳定。也有可能是我的仿真结果有误。这个算法里面的有两个超参数 k u p , k d o w n k_{up},k_{down} kup,kdown。难以解释。我觉得拥塞控制,tunable的参数应该越少越好。
这种基于trend作为拥塞控制信号思想,在10年的论文,就有基本雏形[9]。
下面给个具体的分析,单向时延信号是我从cubic仿真中获取的,仿真代码[10]。我只计算了acc_delay,对单向时延信号进行调和级数滤波。
信号处理代码:
trend.py
import os
class HarmnicMean(object):
def __init__(self,window):
self.w=window
self.c=0
self.his=[]
def newSample(self,s):
mean=0.0
sample=float(s)
if self.c==0:
mean=sample
if sample>0:
self.his.append(1000/sample)
self.c+=1
if self.c>self.w:
a=self.his[self.c-self.w:]
self.his=a
if len(self.his)!=self.w:
print "error"
self.c=self.w
if self.c 调和级数滤波后的单向时延信号:

累计时延梯度信号:
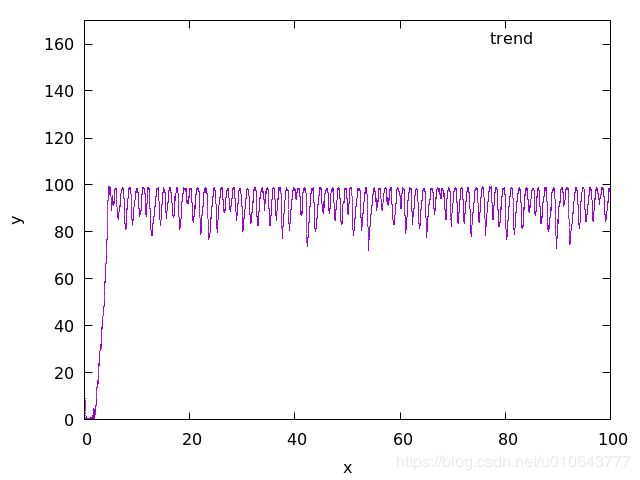
累计时延梯度确实可以反映出网络中的队列的消涨情况。
FBI WARNNIG:研究生小白,不要选拥塞控制相关的研究课题,这个研究领域基本处于停滞状态。因为从网络中可以获取的信号有限,也就限制可以玩出的花样。
[1]webRTC是怎么应对网络变化的
[2]razor https://github.com/yuanrongxi/razor
[3]如何实现1080P延迟低于500ms的实时超清直播传输技术
[4]Analysis and Design of the Google Congestion Control
for Web Real-time Communication
[5]WebRTC基于GCC的拥塞控制(上) - 算法分析
[6]WebRTC-GCC两种实现方案对比
[7] Congestion Control for Web Real-Time Communication
[8] rmcat-simulation-ns3
[9] Trend: A dynamic bandwidth estimation and adaptation algorithm for real-time video calling
[10] congstion simulation-Cubic, BBR, BBRv2
[11] WebRTC研究:Trendline滤波器-TrendlineEstimator