存储设备的DDP功能详解
DDP功能,即Dynamic Disk Pool,它是除了现有的RAID0,1,10,5,6这些传统RAID磁盘组以外的,非常有效的存储管理技术。它可以极大地简化对于闲置空间,闲置存储资源的管理,当然对于现有RAID组,它也简化了管理工作。
在讨论DDP功能之前,我们需要理解以下两个基本的概念:
1。D-Piece:D-Piece是在一块物理硬盘上开出的一段连续的,大小为512MB的存储空间。其中,每个D-Piece包含了4096个存储段,通过计算:512MB/4096=128kb,即每个存储段就是128kb大小。在一个虚拟的存储池中,一个存储的volume是由分布在不同的10个物理硬盘上的D-Piece所组成。
2。D-Stripe:它是由10个分布在不同的物理硬盘上的D-Piece所组成的,大小为4GB。在D-Stripe内,存储数据是以类似于RAID6的条带和校验方式存储的,也就是说如果10个D-Piece组成一个Stripe的话,那么Piece的组织方式就是传统的8+2方式,8个Piece(4GB大小)是存储数据的,1个Piece保存校验信息,最后一个Piece保存RAID定义的Q值。
例如:一个容量为500GB的虚拟磁盘,会包含500GB/4GB个,即125个D-Stripe,对于一个虚拟磁盘,数据的占用空间会从D-Piece的最低的LBA地址开始使用。
2。关键重建,重建失去两个D-Piece数据的物理硬盘,这个优先级默认为“最高”对于超大规模的磁盘池,如果有两块物理硬盘失效,这种情况发生的概率会随着磁盘数量的增大而降低,如之前讨论的内容,按照优先级的配置,关键重建仅仅会持续很小的一个时间窗口,使得数据可用,然后会非常快的进行降级重建,也就是说超大规模的磁盘池场景下,DDP可以保证一定的容错性。
当然,DDP功能也有一些限制,例如:
1。在虚拟磁盘中的数据段大小是128kb,这是固定的,不可以修改。
2。不支持动态的RAID组迁移功能
3。预读的冗余校验功能是不能基于虚拟磁盘来使用的。
4。DDP的最大容量是64TB
5。不支持SSD硬盘
在讨论DDP功能之前,我们需要理解以下两个基本的概念:
1。D-Piece:D-Piece是在一块物理硬盘上开出的一段连续的,大小为512MB的存储空间。其中,每个D-Piece包含了4096个存储段,通过计算:512MB/4096=128kb,即每个存储段就是128kb大小。在一个虚拟的存储池中,一个存储的volume是由分布在不同的10个物理硬盘上的D-Piece所组成。
2。D-Stripe:它是由10个分布在不同的物理硬盘上的D-Piece所组成的,大小为4GB。在D-Stripe内,存储数据是以类似于RAID6的条带和校验方式存储的,也就是说如果10个D-Piece组成一个Stripe的话,那么Piece的组织方式就是传统的8+2方式,8个Piece(4GB大小)是存储数据的,1个Piece保存校验信息,最后一个Piece保存RAID定义的Q值。
从虚拟磁盘和LUN的维度来理解,DDP就是一个虚拟磁盘池,这个池是由很多个按照用户需求来定义生成的4GB大小的D-Stripe组成的。
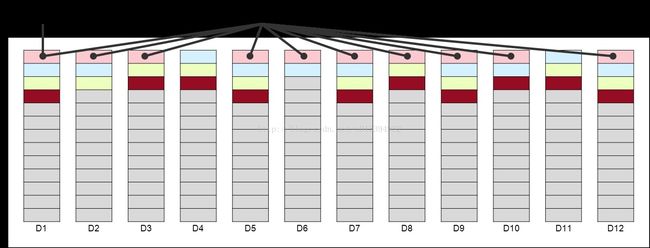
例如:一个容量为500GB的虚拟磁盘,会包含500GB/4GB个,即125个D-Stripe,对于一个虚拟磁盘,数据的占用空间会从D-Piece的最低的LBA地址开始使用。
一个DDP磁盘池中,可以包含多个虚拟磁盘,当然在一套存储系统,也允许包含多个DDP磁盘池。对于系统管理员的需求,也可以把传统的RAID磁盘组和DDP磁盘池二者结合来使用。
和传统的RAID组类似,DDP可以通过DCE特性(动态扩容),动态增加硬盘的方式来对存储系统进行扩容,目前可以支持的最大动态扩容量为12块物理硬盘。当DCE功能初始化之后,保存在现有的D-Piece上的数据会有一小部分被迁移到新扩容的磁盘上来。
DDP的另一个优势是区别于传统意义上的RAID原理,它并没有专门指定的热备磁盘,这样当某一块硬盘存在失效风险的时候,它能提供一个所谓的“集成保护能力”这样不仅可以简化存储设备的管理,也能极大地提高重建的性能,节省时间。当DDP中的磁盘有失效的状态发生,类似于RAID6的重建机制是保存在D-Stripe中的,在重建的过程中,它可以保证在任意一块物理磁盘中不会保存同一个D-Stripe上的两个D-Piece。独立的D-Piece机制可以最小化LBA地址范围。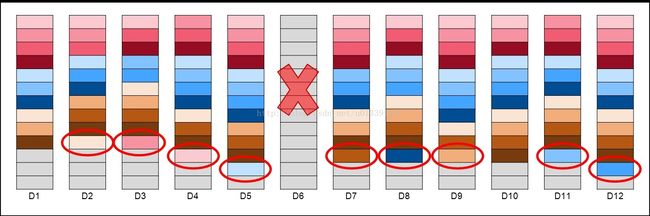
如图所示:6号盘失效,随后,之前保留在这块物理硬盘上的D-Piece数据会在其他的可用硬盘上进行重建。因为是由多块盘在进行写入操作,所以实际的重建时间要大大小于传统的RAID重建时间。当有多块盘失效之后,系统会优先重建那些包含丢失了两个D-Piece的D-Stripe所在的硬盘,以减少数据丢失的风险。当关键数据被重建之后,系统会继续将其他失效的数据进行修复,保证数据的持续可用。从控制器的资源分配角度来看,DDP提供了两种用户可以自由定义的重建优先级配置:
1。降级重建,只有失去一个D-Piece数据的物理硬盘会重建,失去两个的会暂时不可用。这个优先级默认为“高”2。关键重建,重建失去两个D-Piece数据的物理硬盘,这个优先级默认为“最高”对于超大规模的磁盘池,如果有两块物理硬盘失效,这种情况发生的概率会随着磁盘数量的增大而降低,如之前讨论的内容,按照优先级的配置,关键重建仅仅会持续很小的一个时间窗口,使得数据可用,然后会非常快的进行降级重建,也就是说超大规模的磁盘池场景下,DDP可以保证一定的容错性。
例如,假设我们有一个192块物理硬盘组成的存储系统,当有两块物理硬盘失效之后,在1分钟之内,即可完成关键重建工作,在这1分钟之后,系统都是可以提供容错的工作状态的。从数学角度来看,这样规模的一个存储系统,仅仅有5.2%的概率会发生降级重建,关键重建场景发生的概率仅仅有0.52%,这意味着仅仅有5.2GB的数据会在关键场景下进行重建。
当然,DDP功能也有一些限制,例如:
1。在虚拟磁盘中的数据段大小是128kb,这是固定的,不可以修改。
2。不支持动态的RAID组迁移功能
3。预读的冗余校验功能是不能基于虚拟磁盘来使用的。
4。DDP的最大容量是64TB
5。不支持SSD硬盘