STM32F103ZE跑马灯基于库函数
头文件:stm32f10x_gpio.h
源文件:stm32f10x_gpio.c
1个初始化函数:
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
typedef struct
{
uint16_t GPIO_Pin; //指定要初始化的IO口
GPIOSpeed_TypeDef GPIO_Speed; //设置IO口输出速度
GPIOMode_TypeDef GPIO_Mode; //设置工作模式:8种中的一个
}GPIO_InitTypeDef;
例:初始一个函数
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED0-->PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5
2个读取输入电平函数:实际操作的是GPIOx_IDR寄存器
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_5);//读取GPIOA.5的输入电平
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);
GPIO_ReadInputData(GPIOA);//读取GPIOA组中所有io口输入电平
2个读取输出电平函数:实际操作的是GPIO_ODR寄存器。
uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_5);//读取GPIOA.5的输入电平
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);
GPIO_ReadOutputData(GPIOA);//读取GPIOA组中所有io口输入电平
4个设置输出电平函数:
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);实际操作BSRR寄存器。
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);实际操作的BRR寄存器。
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);
常用前两个
实现跑马灯步骤:
1.使能IO口时钟。调用函数RCC_APB2PeriphColckCmd();//不同的IO组,调用的时钟使能函数不一样。
2.初始化IO口模式。调用函数GPIO_Init();
3.操作IO口,输出高低电平。
GPIO_SetBits();//就是高电平
GPIO_ResetBits();//就是低电平
实际操作:(源码在最后代码块)
1.新建一个文件夹,下面包括.c和.h两个文件,按照之前方法的添加到工程中,记得添加路径。
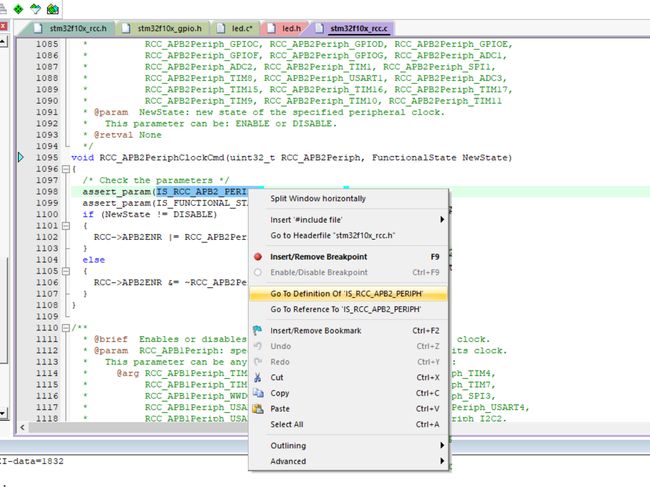
2.调用时钟使能函数 RCC_APB2PeriphColckCmd();
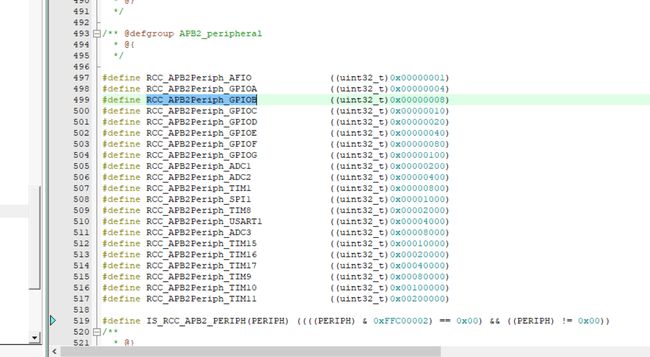
调用的时钟使能函数

3.检索相关参数



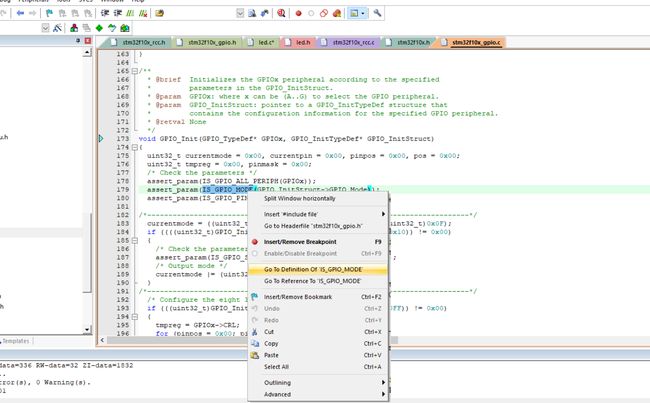
4.初始化IO口模式。调用函数GPIO_Init(); 并检索相关参数。



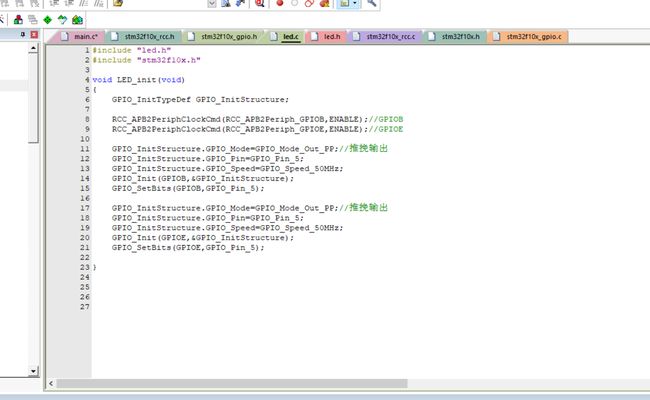
5.参数检索copy完成,如下图所示。
6.编辑.h文件

7.新建添加路径编辑main.c
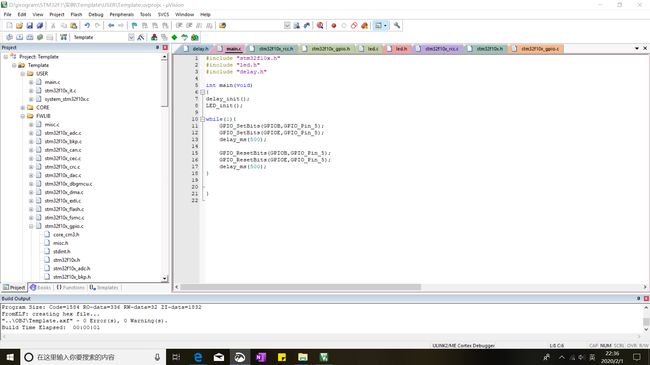
烧录测试。测试成功。


源码:
main.c
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
int main(void)
{
delay_init();
LED_init();
while(1){
GPIO_SetBits(GPIOB,GPIO_Pin_5);
GPIO_SetBits(GPIOE,GPIO_Pin_5);
delay_ms(500);
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
GPIO_ResetBits(GPIOE,GPIO_Pin_5);
delay_ms(500);
}
}
led.h
#ifndef __led_h
#define __led_h
void LED_init(void);
#endif
led.c
#include "led.h"
#include "stm32f10x.h"
void LED_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//GPIOB
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);//GPIOE
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//ÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_5);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//ÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOE,&GPIO_InitStructure);
GPIO_SetBits(GPIOE,GPIO_Pin_5);
}