TensorFlow应用实战-18-Policy Gradient算法
Policy Gradient算法
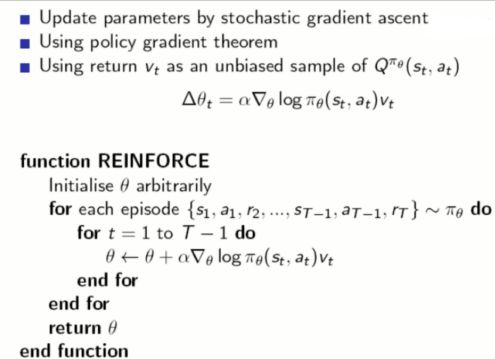
policy Gradient算法不止一种。
有兴趣的话:
深度增强学习之Policy Gradient方法1
https://zhuanlan.zhihu.com/p/21725498
# -*- coding: UTF-8 -*-
"""
Policy Gradient 算法(REINFORCE)。做决策的部分,相当于机器人的大脑
"""
import numpy as np
import tensorflow as tf
try:
xrange = xrange # Python 2
except:
xrange = range # Python 3
# 策略梯度 类
class PolicyGradient:
def __init__(self,
lr, # 学习速率
s_size, # state/observation 的特征数目
a_size, # action 的数目
h_size, # hidden layer(隐藏层)神经元数目
discount_factor=0.99 # 折扣因子
):
self.gamma = discount_factor # Reward 递减率
# 神经网络的前向传播部分。大脑根据 state 来选 action
self.state_in = tf.placeholder(shape=[None, s_size], dtype=tf.float32)
# 第一层全连接层
hidden = tf.layers.dense(self.state_in, h_size, activation=tf.nn.relu)
# 第二层全连接层,用 Softmax 来算概率
self.output = tf.layers.dense(hidden, a_size, activation=tf.nn.softmax)
# 直接选择概率最大的那个 action
self.chosen_action = tf.argmax(self.output, 1)
# 下面主要是负责训练的一些过程
# 我们给神经网络传递 reward 和 action,为了计算 loss
# 再用 loss 来调节神经网络的参数
self.reward_holder = tf.placeholder(shape=[None], dtype=tf.float32)
self.action_holder = tf.placeholder(shape=[None], dtype=tf.int32)
self.indexes = tf.range(0, tf.shape(self.output)[0]) * tf.shape(self.output)[1] + self.action_holder
self.outputs = tf.gather(tf.reshape(self.output, [-1]), self.indexes)
# 计算 loss(和平时说的 loss 不一样)有一个负号
# 因为 TensorFlow 自带的梯度下降只能 minimize(最小化)loss
# 而 Policy Gradient 里面是要让这个所谓的 loss 最大化
# 因此需要反一下。对负的去让它最小化,就是让它正向最大化
self.loss = -tf.reduce_mean(tf.log(self.outputs) * self.reward_holder)
# 得到可被训练的变量
train_vars = tf.trainable_variables()
self.gradient_holders = []
for index, var in enumerate(train_vars):
placeholder = tf.placeholder(tf.float32, name=str(index) + '_holder')
self.gradient_holders.append(placeholder)
# 对 loss 以 train_vars 来计算梯度
self.gradients = tf.gradients(self.loss, train_vars)
optimizer = tf.train.AdamOptimizer(learning_rate=lr)
# apply_gradients 是 minimize 方法的第二部分,应用梯度
self.update_batch = optimizer.apply_gradients(zip(self.gradient_holders, train_vars))
# 计算折扣后的 reward
# 公式: E = r1 + r2 * gamma + r3 * gamma * gamma + r4 * gamma * gamma * gamma ...
def discount_rewards(self, rewards):
discounted_r = np.zeros_like(rewards)
running_add = 0
for t in reversed(xrange(0, rewards.size)):
running_add = running_add * self.gamma + rewards[t]
discounted_r[t] = running_add
return discounted_r
# -*- coding: UTF-8 -*-
"""
游戏的主程序,调用机器人的 Policy Gradient 决策大脑
"""
import numpy as np
import gym
import tensorflow as tf
from policy_gradient import PolicyGradient
# 伪随机数。为了能够复现结果
np.random.seed(1)
env = gym.make('CartPole-v0')
env = env.unwrapped # 取消限制
env.seed(1) # 普通的 Policy Gradient 方法, 回合的方差比较大, 所以选一个好点的随机种子
print(env.action_space) # 查看这个环境中可用的 action 有多少个
print(env.observation_space) # 查看这个环境中 state/observation 有多少个特征值
print(env.observation_space.high) # 查看 observation 最高取值
print(env.observation_space.low) # 查看 observation 最低取值
update_frequency = 5 # 更新频率,多少回合更新一次
total_episodes = 3000 # 总回合数
# 创建 PolicyGradient 对象
agent = PolicyGradient(lr=0.01,
a_size=env.action_space.n, # 对 CartPole-v0 是 2, 两个 action,向左/向右
s_size=env.observation_space.shape[0], # 对 CartPole-v0 是 4
h_size=8)
with tf.Session() as sess:
# 初始化所有全局变量
sess.run(tf.global_variables_initializer())
# 总的奖励
total_reward = []
gradient_buffer = sess.run(tf.trainable_variables())
for index, grad in enumerate(gradient_buffer):
gradient_buffer[index] = grad * 0
i = 0 # 第几回合
while i < total_episodes:
# 初始化 state(状态)
s = env.reset()
episode_reward = 0
episode_history = []
while True:
# 更新可视化环境
env.render()
# 根据神经网络的输出,随机挑选 action
a_dist = sess.run(agent.output, feed_dict={agent.state_in: [s]})
a = np.random.choice(a_dist[0], p=a_dist[0])
a = np.argmax(a_dist == a)
# 实施这个 action, 并得到环境返回的下一个 state, reward 和 done(本回合是否结束)
s_, r, done, _ = env.step(a) # 这里的 r(奖励)不能准确引导学习
x, x_dot, theta, theta_dot = s_ # 把 s_ 细分开, 为了修改原配的 reward
# x 是车的水平位移。所以 r1 是车越偏离中心, 分越少
# theta 是棒子离垂直的角度, 角度越大, 越不垂直。所以 r2 是棒越垂直, 分越高
r1 = (env.x_threshold - abs(x)) / env.x_threshold - 0.8
r2 = (env.theta_threshold_radians - abs(theta)) / env.theta_threshold_radians - 0.5
r = r1 + r2 # 总 reward 是 r1 和 r2 的结合, 既考虑位置, 也考虑角度, 这样学习更有效率
episode_history.append([s, a, r, s_])
episode_reward += r
s = s_
# Policy Gradient 是回合更新
if done: # 如果此回合结束
# 更新神经网络
episode_history = np.array(episode_history)
episode_history[:, 2] = agent.discount_rewards(episode_history[:, 2])
feed_dict = {
agent.reward_holder: episode_history[:, 2],
agent.action_holder: episode_history[:, 1],
agent.state_in: np.vstack(episode_history[:, 0])
}
# 计算梯度
grads = sess.run(agent.gradients, feed_dict=feed_dict)
for idx, grad in enumerate(grads):
gradient_buffer[idx] += grad
if i % update_frequency == 0 and i != 0:
feed_dict = dictionary = dict(zip(agent.gradient_holders, gradient_buffer))
# 应用梯度下降来更新参数
_ = sess.run(agent.update_batch, feed_dict=feed_dict)
for index, grad in enumerate(gradient_buffer):
gradient_buffer[index] = grad * 0
total_reward.append(episode_reward)
break
# 每 50 回合打印平均奖励
if i % 50 == 0:
print("回合 {} - {} 的平均奖励: {}".format(i, i + 50, np.mean(total_reward[-50:])))
i += 1
A3c实现3d赛车游戏: 成果展示
python play.py --num-workers 2 --log-dir neonrace
numworkders是 客户端。
重制: 任天堂版权问题
TensorKart
https://github.com/kevinhughes27/TensorKart
这个例子是截取屏幕上的截图,使用卷积神经网络训练。
实现步骤
- 游戏环境,设置
- 机器人大脑
- 游戏主程序
# -*- coding: UTF-8 -*-
"""
配置 Neon Race(霓虹赛车)的游戏环境,以方便我们训练
"""
import cv2
import time
import numpy as np
import logging
import gym
from gym import spaces
from gym.spaces.box import Box
import universe
from universe import vectorized
from universe import spaces as vnc_spaces
from universe.spaces.vnc_event import keycode
from universe.wrappers import BlockingReset, GymCoreAction, EpisodeID, Unvectorize, Vectorize, Vision, Logger
# 配置日志系统
logger = logging.getLogger(__name__)
logger.setLevel(logging.INFO)
universe.configure_logging()
# 游戏:Neon Race
GAME = "flashgames.NeonRace-v0"
# 创建并配置游戏环境
def create_env(client_id, remotes):
env = gym.make(GAME)
env = Vision(env)
env = Logger(env)
env = BlockingReset(env)
reg = universe.runtime_spec('flashgames').server_registry
height = reg[GAME]["height"]
width = reg[GAME]["width"]
env = CropScreen(env, height, width, 84, 18)
env = Rescale(env)
# 可用的按键:左,右,上,左上,右上,下,用 Turbo 来加速
keys = ['left', 'right', 'up', 'left up', 'right up', 'down', 'up x']
env = DiscreteToFixedKeysVNCActions(env, keys)
env = EpisodeID(env)
env = DiagnosticsInfo(env)
env = Unvectorize(env)
env.configure(fps=5.0, remotes=remotes, start_timeout=15 * 60, client_id=client_id, vnc_driver='go', vnc_kwargs={
'encoding': 'tight', 'compress_level': 0,
'fine_quality_level': 50, 'subsample_level': 3})
return env
# 给环境加上记录诊断信息的功能
def DiagnosticsInfo(env, *args, **kwargs):
return vectorized.VectorizeFilter(env, DiagnosticsInfoI, *args, **kwargs)
# 诊断信息的类
class DiagnosticsInfoI(vectorized.Filter):
def __init__(self, log_interval=503):
super(DiagnosticsInfoI, self).__init__()
self._episode_time = time.time()
self._last_time = time.time()
self._local_t = 0
self._log_interval = log_interval
self._episode_reward = 0
self._episode_length = 0
self._all_rewards = []
self._num_vnc_updates = 0
self._last_episode_id = -1
def _after_reset(self, observation):
logger.info('重置环境中')
self._episode_reward = 0
self._episode_length = 0
self._all_rewards = []
return observation
def _after_step(self, observation, reward, done, info):
to_log = {}
if self._episode_length == 0:
self._episode_time = time.time()
self._local_t += 1
if info.get("stats.vnc.updates.n") is not None:
self._num_vnc_updates += info.get("stats.vnc.updates.n")
if self._local_t % self._log_interval == 0:
cur_time = time.time()
elapsed = cur_time - self._last_time
fps = self._log_interval / elapsed
self._last_time = cur_time
cur_episode_id = info.get('vectorized.episode_id', 0)
to_log["diagnostics/fps"] = fps
if self._last_episode_id == cur_episode_id:
to_log["diagnostics/fps_within_episode"] = fps
self._last_episode_id = cur_episode_id
if info.get("stats.gauges.diagnostics.lag.action") is not None:
to_log["diagnostics/action_lag_lb"] = info["stats.gauges.diagnostics.lag.action"][0]
to_log["diagnostics/action_lag_ub"] = info["stats.gauges.diagnostics.lag.action"][1]
if info.get("reward.count") is not None:
to_log["diagnostics/reward_count"] = info["reward.count"]
if info.get("stats.gauges.diagnostics.clock_skew") is not None:
to_log["diagnostics/clock_skew_lb"] = info["stats.gauges.diagnostics.clock_skew"][0]
to_log["diagnostics/clock_skew_ub"] = info["stats.gauges.diagnostics.clock_skew"][1]
if info.get("stats.gauges.diagnostics.lag.observation") is not None:
to_log["diagnostics/observation_lag_lb"] = info["stats.gauges.diagnostics.lag.observation"][0]
to_log["diagnostics/observation_lag_ub"] = info["stats.gauges.diagnostics.lag.observation"][1]
if info.get("stats.vnc.updates.n") is not None:
to_log["diagnostics/vnc_updates_n"] = info["stats.vnc.updates.n"]
to_log["diagnostics/vnc_updates_n_ps"] = self._num_vnc_updates / elapsed
self._num_vnc_updates = 0
if info.get("stats.vnc.updates.bytes") is not None:
to_log["diagnostics/vnc_updates_bytes"] = info["stats.vnc.updates.bytes"]
if info.get("stats.vnc.updates.pixels") is not None:
to_log["diagnostics/vnc_updates_pixels"] = info["stats.vnc.updates.pixels"]
if info.get("stats.vnc.updates.rectangles") is not None:
to_log["diagnostics/vnc_updates_rectangles"] = info["stats.vnc.updates.rectangles"]
if info.get("env_status.state_id") is not None:
to_log["diagnostics/env_state_id"] = info["env_status.state_id"]
if reward is not None:
self._episode_reward += reward
if observation is not None:
self._episode_length += 1
self._all_rewards.append(reward)
if done:
logger.info('回合结束: 回合奖励=%s 回合长度=%s', self._episode_reward, self._episode_length)
total_time = time.time() - self._episode_time
to_log["global/episode_reward"] = self._episode_reward
to_log["global/episode_length"] = self._episode_length
to_log["global/episode_time"] = total_time
to_log["global/reward_per_time"] = self._episode_reward / total_time
self._episode_reward = 0
self._episode_length = 0
self._all_rewards = []
return observation, reward, done, to_log
# 限定的按键状态
class FixedKeyState(object):
def __init__(self, keys):
self._keys = [keycode(key) for key in keys]
self._down_keysyms = set()
def apply_vnc_actions(self, vnc_actions):
for event in vnc_actions:
if isinstance(event, vnc_spaces.KeyEvent):
if event.down:
self._down_keysyms.add(event.key)
else:
self._down_keysyms.discard(event.key)
def to_index(self):
action_n = 0
for key in self._down_keysyms:
if key in self._keys:
# 如果按下多个 key(按键),只用第一个 key
action_n = self._keys.index(key) + 1
break
return action_n
# 定义一个确定的 action space(动作空间)
class DiscreteToFixedKeysVNCActions(vectorized.ActionWrapper):
def __init__(self, env, keys):
super(DiscreteToFixedKeysVNCActions, self).__init__(env)
self._keys = keys
self._generate_actions()
self.action_space = spaces.Discrete(len(self._actions))
# 生成 action
def _generate_actions(self):
self._actions = []
uniq_keys = set()
for key in self._keys:
for cur_key in key.split(' '):
uniq_keys.add(cur_key)
for key in [''] + self._keys:
split_keys = key.split(' ')
cur_action = []
for cur_key in uniq_keys:
cur_action.append(vnc_spaces.KeyEvent.by_name(cur_key, down=(cur_key in split_keys)))
self._actions.append(cur_action)
self.key_state = FixedKeyState(uniq_keys)
def _action(self, action_n):
# 每个 action 可能是一个长度为 1 的 np.array
# 转换成 int 类型,以避免 warning(警告)
return [self._actions[int(action)] for action in action_n]
# 裁剪屏幕区域
class CropScreen(vectorized.ObservationWrapper):
"""
从左上角开始裁剪 height(高)x width(宽)大小的区域
"""
def __init__(self, env, height, width, top=0, left=0):
super(CropScreen, self).__init__(env)
self.height = height
self.width = width
self.top = top
self.left = left
self.observation_space = Box(0, 255, shape=(height, width, 3))
def _observation(self, observation_n):
return [ob[self.top:self.top+self.height, self.left:self.left+self.width, :] if ob is not None else None
for ob in observation_n]
# 处理 Frame(帧)
def _process_frame(frame):
frame = cv2.resize(frame, (200, 128))
frame = frame.mean(2).astype(np.float32)
frame *= (1.0 / 255.0)
frame = np.reshape(frame, [128, 200, 1])
return frame
# 调节观测空间的大小
class Rescale(vectorized.ObservationWrapper):
def __init__(self, env=None):
super(Rescale, self).__init__(env)
self.observation_space = Box(0.0, 1.0, [128, 200, 1])
def _observation(self, observation_n):
return [_process_frame(observation) for observation in observation_n]
推荐强化学习的博客:
https://morvanzhou.github.io/tutorials/machine-learning/reinforcement-learning/
https://github.com/MorvanZhou/Reinforcement-learning-with-tensorflow
深度增强学习(DRL) 漫谈 从AC 到 A3C
https://blog.csdn.net/jinzhuojun/article/details/72851548
演员评论家
结合了 基于策略 和 基于价值
Actor-Critic 是演员-评论家 算法 结合了 Poilcy Gradient 和 Q 学习
Actor 负责表演 基于Policy(策略) 的算法。选取Action来执行
Critic负责给Actor打分,基于Value(值)的算法。Q-learning

什么是A3C?
https://medium.com/emergent-future/simple-reinforcement-learning-with-tensorflow-part-8-asynchronous-actor-critic-agents-a3c-c88f72a5e9f2
Asynchronous Actor-Critic Agents (A3C)
异步 优势 演员-评论家
几个人同时玩游戏,玩游戏的经验上传到一个中央大脑。
几个人从中央大脑中获取最新最强的玩游戏方法
A3C 算法英文:



分布式TensorFlow,有效利用分布式
分布式(Distributed) TensorFlow
可以高效利用Cpu多核,达到近似GPU的训练速度
PS: Parameter Server 缩写。类似于全局的网络服务器
worker:客户端。从ps拉取pull参数/推送(push)参数到ps
https://www.tensorflow.org/deploy/distributed
TensorFlow分布式全套(原理 部署 实例)
https://blog.csdn.net/luodongri/article/details/52596780
https://blog.csdn.net/CodeMaster_/article/details/76223835
基于Google的gRPC通信框架来做的。
TensorFlow学习笔记
https://blog.csdn.net/u012436149/article/details/53140869