本文学习 Golang 的 Map 数据结构,以及map buckets 的数据组织结构。
hash 表是什么
从大学的课本里面,我们学到:hash 表其实就是将key 通过hash算法映射到数组的某个位置,然后把对应的val存放起来。
如果出现了hash冲突(也就是说,不同的key被映射到了相同的位置上时),就需要解决hash冲突。解决hash冲突的方法还是比较多的,比如说开放定址法,再哈希法,链地址法,公共溢出区等(复习下大学的基本知识)。
其中链地址法比较常见,下面是一个链地址法的常见模式:
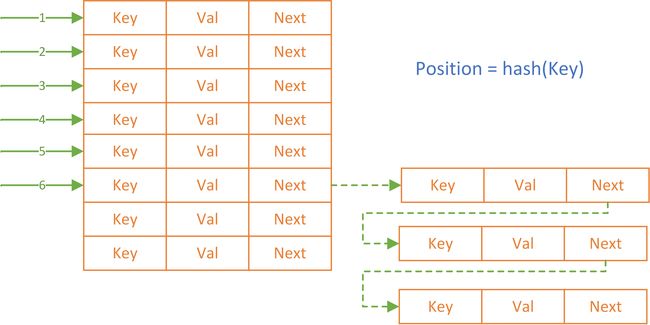
Position 指通过Key 计算出的数组偏移量。例如当 Position = 6 的位置已经填满KV后,再次插入一条相同Position的数据将通过链表的方式插入到该条位置之后。
在php的Array 中是这么实现的,golang中也基本是这么实现。下面我们学习下Golang中map的实现。
Golang Map 实现的数据结构
Golang的map中,首先把kv 分在了N个桶中,每个桶中的数据有8条(bucketCnt)。如果一个桶满了(overflow),也会采用链地址法解决hash 的冲突。
下面是定义一个hashmap的结构体:
type hmap struct {
// 长度
count int
// map 的标识, 下方做了定义
flags uint8
// 实际buckets 的长度为 2 ^ B
B uint8
// 从bucket中溢出的数量,(存在extra 里面)
noverflow uint16
// hash 种子,做key 哈希的时候会用到
hash0 uint32
// 存储 buckets 的地方
buckets unsafe.Pointer
// 迁移时oldbuckets中存放部分buckets 的数据
oldbuckets unsafe.Pointer
// 迁移的数量
nevacuate uintptr
// 一些额外的字段,在做溢出处理以及数据增长的时候会用到
extra *mapextra
}
const (
// 有一个迭代器在使用buckets
iterator = 1
// 有一个迭代器在使用oldbuckets
oldIterator = 2
// 并发写,通过这个标识报panic
hashWriting = 4
sameSizeGrow = 8
)
type mapextra struct {
overflow *[]*bmap
oldoverflow *[]*bmap
nextOverflow *bmap
}
type bmap struct {
tophash [bucketCnt]uint8
}
表中除了对基本的hash数据结构做了定义外,还对数据迁移、扩容等操作做了定义,这里我们可以忽略,等学习到时我们再深入了解。
深入 桶列表 (buckets)
buckets 字段中是存储桶数据的地方。正常会一次申请至少2^N长度的数组,数组中每个元素就是一个桶。N 就是结构体中的B。这里面要注意以下几点:
- 为啥是2的幂次方 为了做完hash后,通过掩码的方式取到数组的偏移量, 省掉了不必要的计算。
- B 这个数是怎么确定的 这个和我们map中要存放的数据量是有很大关系的。我们在创建map的时候来详述。
- bucket 的偏移是怎么计算的 hash 方法有多个,在 runtime/alg.go 里面定义了。不同的类型用不同的hash算法。算出来是一个uint32的一个hash 码,通过和B取掩码,就找到了bucket的偏移了。下面是取对应bucket的例子:
// 根据key的类型取相应的hash算法
alg := t.key.alg
hash := alg.hash(key, uintptr(h.hash0))
// 根据B拿到一个掩码
m := bucketMask(h.B)
// 通过掩码以及hash指,计算偏移得到一个bucket
b := (*bmap)(add(h.buckets, (hash&m)*uintptr(t.bucketsize)))
深入 桶 (bucket)
一个桶的示意图如下:

每个桶里面,可以放8个k,8个v,还有一个overflow指针(就是上面的next),用来指向下一个bucket 的地址。在每个bucket的头部,还会放置一个tophash,也就是bmap 结构体。这个数组里面存放的是key的hash值,用来对比我们key生成的hash和存出的hash是否一致(当然除了这个还有其他的用途,后面讲数据访问的时候会讲到)。 tophash中的数据,是从计算的hash值里面截取的。获取bucket 是用的低bit位的hash,tophash 使用的是高bit位的hash值(8位)
- 为啥bucket 一次要存8个kv,而不是一个kv放一个bucket,然后链地址法做处理就OK了 据我分析,有几点原因: a, 一次分配8个kv的空间,可以减少内存的分配频次; b,减少了overflow指针的内存占用,比如说8个kv,采用一个一个存储的话,需要8 * 8B (64位机) = 64B的数据存下一个的地址,而采用go实现的这种方式,只需要 8B + 8B (bmap的大小) = 16B 的数据就可以了。
- 为啥需要用tophash 一般的hash 实现逻辑是直接和key比较,如果比较成功,这找到相应key的数据。但是这里用到了tophash,好处是可以减少key的比较成本(毕竟key 不一定都是整数形式存在的)
- 为啥是8个 8 * 8B = 64B 整好是64位机的一个最小寻址空间,不过可以通过修改源码自定义吧。
- 为什么key 和val 要分开放 这个也比较好理解,key 和val 都是用户可以自定义的。如果key是定长的(比如是数字,或者 指针之类的,大概率是这样。)内存是比较整齐的,利于寻址吧。
技术总结
golang 实现的map比朴素的hashmap 在很多方面都有优化。
- 使用掩码方式获取偏移,减少判断。
- bucket 存储方式的优化。
- 通过tophash 先进行一次比较,减少key 比较的成本。
- 当然,有一点是不太明白的,为啥 overflow 指针要放在 kv 后面? 放在tophash 之后的位置岂不是更完美?
今天的作业就交完了。下一篇将学习golang map的数据初始化实现。
参考
[1] 深入理解 Go map:初始化和访问