STM32F429与CC2530 ZigBee模块通信
本学期学了物联网技术与应用课程,有接触到了ZigBee模块,期末课设就是做一个简单的ZigBee环境数据采集,通过串口传输到STM32,并用esp8266 WIFI模块上传至云端。这里记录一下STM32F429与CC2530 ZigBee模块通信的方法。
目录
- ZigBee简介
- 串口通信简介
- 简单的数据显示
ZigBee简介
ZigBee译为"紫蜂",它与蓝牙相类似。是一种新兴的短距离无线通信技术,用于传感控制应用(Sensor and Control)。由IEEE 802.15工作组中提出,并由其TG4工作组制定规范。特点如下:
①低功耗。在低耗电待机模式下,2节5号干电池可支持1个节点工作6~24个月,甚至更长。这是ZigBee的突出优势。相比较,蓝牙能工作数周、WiFi可工作数小时。
TI公司和德国的Micropelt公司共同推出新能源的ZigBee节点。该节点采用Micropelt公司的热电发电机给TI公司的ZigBee提供电源。
②低成本。通过大幅简化协议(不到蓝牙的1/10),降低了对通信控制器的要求,按预测分析,以8051的8位微控制器测算,全功能的主节点需要32KB代码,子功能节点少至4KB代码,而且ZigBee免协议专利费。每块芯片的价格大约为2美元。
③低速率。ZigBee工作在20~250kbps的速率,分别提供250 kbps(2.4GHz)40kbps(915 MHz)和20kbps(868 MHz)的原始数据吞吐率,满足低速率传输数据的应用需求。
④近距离。传输范围一般介于10~100m之间,在增加发射功率后,可增加到1-3km。这指的是相邻节点间的距离。如果通过路由和节点间通信的接力,传输距离将可以更远。
⑤短时延。ZigBee的响应速度较快,一般从睡眠转入工作状态只需15ms,节点连接进入网络只需30ms,进一步节省了电能。相比较,蓝牙需要3~10s、WiFi 需要3 s。
⑥高容量。ZigBee可采用星状、片状和网状网络结构,由一个主节点管理若干子节点,最多一个主节点可管理254个子节点;同时主节点还可由上一层网络节点管理,最多可组成65000 个节点的大网。
⑦高安全。ZigBee提供了三级安全模式,包括安全设定、使用访问控制清单(Access Control List, ACL) 防止非法获取数据以及采用高级加密标准(AES 128)的对称密码,以灵活确定其安全属性。
⑧免执照频段。使用工业科学医疗(ISM)频段,915MHz(美国), 868MHz(欧洲), 2. 4GHz(全球) 。

串口通信简介
串口通信是指外设和计算机间,通过数据信号线 、地线、控制线等,按位进行传输数据的一种通讯方式。这种通信方式使用的数据线少,在远距离通信中可以节约通信成本,但其传输速度比并行传输低。
串口是计算机上一种非常通用的设备通信协议。大多数计算机(不包括笔记本电脑)包含两个基于RS-232的串口。串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。同时,串口通信协议也可以用于获取远程采集设备的数据。
RS-232(ANSI/EIA-232标准)是IBM-PC及其兼容机上的串行连接标准。可用于许多用途,比如连接鼠标、打印机或者Modem,同时也可以接工业仪器仪表。用于驱动和连线的改进,实际应用中RS-232的传输长度或者速度常常超过标准的值。RS-232只限于PC串口和设备间点对点的通信。RS-232串口通信最远距离是50英尺。
简单的数据显示
简单来说,就是把ZigBee的串口和STM32的串口连接起来,这里STM32的串口选取串口2,波特率都设置为115200 。
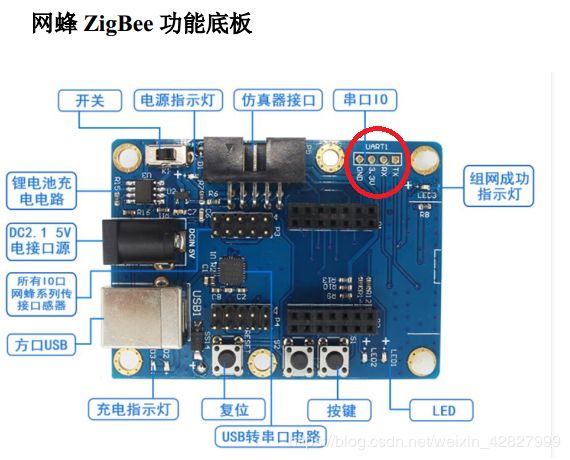
接线如下:
STM32-----ZigBee
VCC -----> VCC
GND -----> GND
TXD -----> RXD
RXD -----> TXD
程序部分,就是通过配置串口2实现数据的采集,这里给出一个简单的串口2配置函数,通过该函数的配置可以在串口1输出在ZigBee传输过来的数据:
//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound)
{
//UART 初始化设置
UART1_Handler.Instance=USART1; //USART1
UART1_Handler.Init.BaudRate=bound; //波特率
UART1_Handler.Init.WordLength=UART_WORDLENGTH_8B; //字长为8位数据格式
UART1_Handler.Init.StopBits=UART_STOPBITS_1; //一个停止位
UART1_Handler.Init.Parity=UART_PARITY_NONE; //无奇偶校验位
UART1_Handler.Init.HwFlowCtl=UART_HWCONTROL_NONE; //无硬件流控
UART1_Handler.Init.Mode=UART_MODE_TX_RX; //收发模式
HAL_UART_Init(&UART1_Handler); //HAL_UART_Init()会使能UART1
//HAL_UART_Receive_IT(&UART1_Handler, (u8 *)aRxBuffer, RXBUFFERSIZE);//该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量
}
//串口2初始化
void uart2_init(u32 baund)
{
UART2_Handler.Instance=USART2; //USART2
UART2_Handler.Init.BaudRate=baund; //波特率
UART2_Handler.Init.WordLength=UART_WORDLENGTH_8B; //字长为8位数据格式
UART2_Handler.Init.StopBits=UART_STOPBITS_1; //一个停止位
UART2_Handler.Init.Parity=UART_PARITY_NONE; //无奇偶校验位
UART2_Handler.Init.HwFlowCtl=UART_HWCONTROL_NONE; //无硬件流控
UART2_Handler.Init.Mode=UART_MODE_TX_RX; //收发模式
HAL_UART_Init(&UART2_Handler);//HAL_UART_Init()会使能UART2
}
//UART底层初始化,时钟使能,引脚配置,中断配置
//此函数会被HAL_UART_Init()调用
//huart:串口句柄
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_Initure;
if(huart->Instance==USART1)//如果是串口1,进行串口1 MSP初始化
{
__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟
__HAL_RCC_USART1_CLK_ENABLE(); //使能USART1时钟
GPIO_Initure.Pin=GPIO_PIN_9; //PA9
GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; //高速
GPIO_Initure.Alternate=GPIO_AF7_USART1; //复用为USART1
HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA9
GPIO_Initure.Pin=GPIO_PIN_10; //PA10
HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA10
#if EN_USART1_RX
HAL_NVIC_EnableIRQ(USART1_IRQn); //使能USART1中断通道
HAL_NVIC_SetPriority(USART1_IRQn,3,3); //抢占优先级3,子优先级3
#endif
}
if(huart->Instance==USART2)//如果是串口2,进行串口2 MSP初始化
{
__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟
__HAL_RCC_USART2_CLK_ENABLE(); //使能USART3时钟
GPIO_Initure.Pin=GPIO_PIN_2; //PA2
GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; //高速
GPIO_Initure.Alternate=GPIO_AF7_USART2; //复用为USART2
HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PB10
GPIO_Initure.Pin=GPIO_PIN_3; //PA3
HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA3
__HAL_UART_ENABLE_IT(huart,UART_IT_RXNE); //开启接收中断
HAL_NVIC_EnableIRQ(USART2_IRQn); //使能USART3中断
HAL_NVIC_SetPriority(USART2_IRQn,2,3); //抢占优先级2,子优先级3
}
}
//串口1中断服务程序
void USART1_IRQHandler(void)
{
u8 Res;
#if SYSTEM_SUPPORT_OS //使用OS
OSIntEnter();
#endif
if((__HAL_UART_GET_FLAG(&UART1_Handler,UART_FLAG_RXNE)!=RESET)) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
HAL_UART_Receive(&UART1_Handler,&Res,1,1000);
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
HAL_UART_IRQHandler(&UART1_Handler);
#if SYSTEM_SUPPORT_OS //使用OS
OSIntExit();
#endif
}
void USART2_IRQHandler(void)
{
u8 Res;
if((__HAL_UART_GET_FLAG(&UART2_Handler,UART_FLAG_RXNE)!=RESET)) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
HAL_UART_Receive(&UART2_Handler,&Res,1,1000);
if((USART2_RX_STA&0x8000)==0)//接收未完成
{
if(USART2_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART2_RX_STA=0;//接收错误,重新开始
else USART2_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART2_RX_STA|=0x4000;
else
{
USART2_RX_BUF[USART2_RX_STA&0X3FFF]=Res ;
USART2_RX_STA++;
if(USART2_RX_STA>(USART2_MAX_RECV_LEN-1))USART2_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
HAL_UART_IRQHandler(&UART2_Handler);
}
main.c中的输出如下:
int main(void)
{
u8 reclen=0;
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz
delay_init(180);
uart_init(115200);
uart2_init(115200);
printf("Welcome to use!\r\n");
while(1)
{
reclen=USART2_RX_STA&0X7FFF; //得到数据长度
USART2_RX_BUF[reclen]=0; //加入结束符
printf("%s\r\n",USART2_RX_BUF);//USART2接ZigBeeTXD和RXD
USART2_RX_STA=0;
delay_ms(1000);
}
}
ZigBee部分的代码是一个裸机代码,随便写的:
/**************************************/
/* WeBee团队 */
/* Zigbee学习例程 */
/*例程名称:温湿度传感器DHT11 */
/*建立时间:2012/10/2 */
/*描述:将采集到的环境信息通过串口打印到
串口调试助手。
**************************************/
#include
#include
#include "UART.H"
#include "DHT11.H"
#define AIR P2_0 //定义烟雾接口
#define HUO P1_1 //定义火焰接口
#define uint unsigned int
#define uchar unsigned char
void Yanwu_init();
void huoyan_init();
uchar AirScan();
uchar AirScan2();
void Delayms(uint);
void Delayms(uint xms)
{
uint i,j;
for(i=xms;i>0;i--)
for(j=587;j>0;j--);
}
void Yanwu_init()
{
P2SEL &= ~0X01;
P2DIR &= ~0X01;
P2INP &= ~0x01;
}
void huoyan_init()
{
P1SEL &= ~0X01;
P1DIR &= ~0X01;
P1INP &= ~0x01;
}
uchar AirScan(void)
{
if(AIR==0)
{
Delayms(10);
if(AIR==0)
{
return 1;
}
}
return 0;
}
uchar AirScan2(void)
{
if(HUO==0)
{
Delayms(10);
if(HUO==0)
{
return 1; // ?T?ì?í
}
}
return 0; //óD?ì?í
}
/***************************
主函数
***************************/
void main(void)
{
Yanwu_init();
huoyan_init();
Delay_ms(1000);//让设备稳定
InitUart(); //串口初始化
while(1)
{
DHT11(); //获取温湿度
P0DIR |= 0x40; //IO口需要重新配置
/******温湿度的ASC码转换*******/
temp[0]=wendu_shi+0x30;
temp[1]=wendu_ge+0x30;
humidity[0]=shidu_shi+0x30;
humidity[1]=shidu_ge+0x30;
/*******信息通过串口打印********/
Uart_Send_String(biaoshifu,6);
Uart_Send_String(douhao,1);
Uart_Send_String(temp,2);
Uart_Send_String(douhao,1);
Uart_Send_String(temp1,1);
Uart_Send_String(douhao,1);
Uart_Send_String(humidity,2);
Uart_Send_String(douhao,1);
Uart_Send_String(humidity1,1);
Uart_Send_String(douhao,1);
if(AirScan())
{
Uart_Send_String(truenumber,1);
Uart_Send_String(douhao,1);
Uart_Send_String(youyanwu,1);
Uart_Send_String(douhao,1);
}
else
{
Uart_Send_String(falsenumber,1);
Uart_Send_String(douhao,1);
Uart_Send_String(youyanwu,1);
Uart_Send_String(douhao,1);
}
if(AirScan2())
{
Uart_Send_String(truenumber,1);
Uart_Send_String(douhao,1);
Uart_Send_String(youhuoyan,1);
Uart_Send_String(douhao,1);
}
else
{
Uart_Send_String(falsenumber,1);
Uart_Send_String(douhao,1);
Uart_Send_String(youhuoyan,1);
Uart_Send_String(douhao,1);
}
Uart_Send_String("\r\n",2);
Delay_ms(2000);
}
}
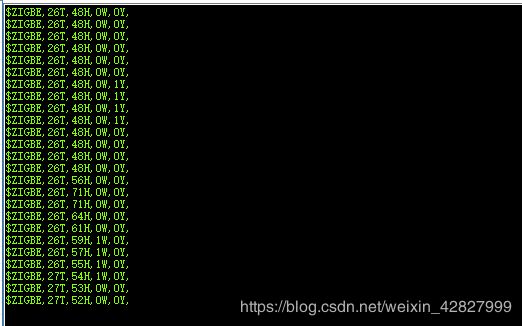
Uart_Send_String里面的数组数据定义如下:
uchar biaoshifu[6]="$ZIGBE";
uchar temp[2]={0,0};
uchar temp1[1]="T";//temp
uchar humidity[2]={0,0};
uchar humidity1[1]="H";//humidity
uchar youyanwu[1]="W";//youyanwu
uchar meiyanwu[1]="U";//meiyanwu
uchar youhuoyan[1]="Y";//youhuoyan
uchar meihuoyan[1]="N";//meihuoyan
uchar douhao[1]=",";//douhao
uchar truenumber[1]="1";
uchar falsenumber[1]="0";
在电脑串口助手可以看到输出从ZigBee获取到的数据: