二维线图元的生成
文章目录
- 1. 图元
- 2. 图形的扫描转换
- 3. 直线段的扫描转换算法
- 3.1 直接求交法
- 3.2 DDA算法
- 3.3 中点算法
- d d d值的递推公式
- 3.4 Bresenham
- 基本思想
- 改进1
- 改进2
1. 图元
- 图形描述:复杂图形既可以看作是若干点组成,也可以看作是由线段等基本几何机构组成。
- 图元:包含坐标和其它属性信息的基本几何结构称为图元,即最基本的图形元素。
- 图元的生成,是从图元的参数表示形式(由图形软件包的使用者指定)到点阵表示形式(光栅显示系统刷新时所需的表示形式)的转换。这个过程也成为扫描转换,主要工作包括确定像素集合及其颜色,显示图形对象。
2. 图形的扫描转换
光栅图形显示器可以看作一个像素的矩阵,在光栅图形显示器上显示任何一种图像,实际上都是一些具有一种或多种颜色的像素集合,确定最佳逼近图像的像素集合,并用指定的属性写像素的过程称为图像的扫描转换或光栅化。确定一个像素集合,用于显示一个图形的过程。
- 裁剪:确定一个图形的哪些部分在窗口内,哪些部分在窗口外。
3. 直线段的扫描转换算法
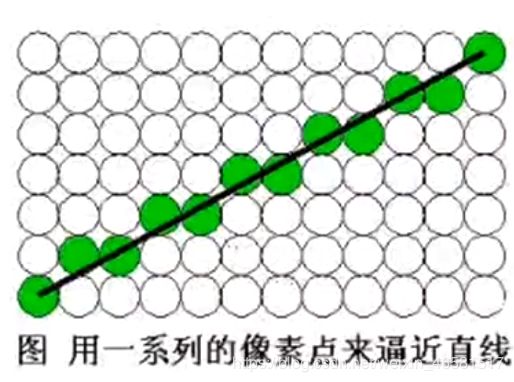
确定最佳逼近于该直线的一组像素,且按扫描线顺序,对这些像素进行操作。
- 光栅扫描显示器的本质决定了它难以生成完美的直线段,也不能保证直线段精确地通过起点和重点。
直线的绘制要求:
- 直线要直:要求具有精确的起点和终点。
- 直线无方向性:从起点绘制到终点的直线段与从终点绘制到起点的直线段要重合。
- 直线的亮度、色泽要均匀。
- 画线的速度要快:即尽量使用加减法整数运算,避免乘、除、开方、三角等复杂运算,但随着计算机处理浮点数与整数的速度趋于一致,这点要求在减弱。
解决的问题:给定直线的两个端点,画出该直线。
3.1 直接求交法
假定直线的起点、终点分别为: P 0 ( x 0 , y 0 ) , P 1 ( x 1 , y 1 ) P_0(x_0, y_0),P_1(x_1, y_1) P0(x0,y0),P1(x1,y1),且都为整数。则直线的参数方程为:
y = k x + b y = kx + b y=kx+b
k = y 1 − y 0 x 1 − x 0 , b = x 1 y 0 − x 0 y 1 x 1 − x 0 k = \frac{y_1 - y_0}{x_1 - x_0},b = \frac{x_1y_0 - x_0y_1}{x_1 - x_0} k=x1−x0y1−y0,b=x1−x0x1y0−x0y1
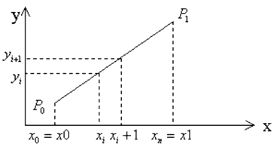
- 以1个像素为单位分割区间 [ x 0 , x 1 ] [x_0, x_1] [x0,x1],得到 { x i } i = 0 n \{x_i\}^n_{i=0} {xi}i=0n
- 利用直线方程计算 { y i } \{y_i\} {yi}
- 对 y i y_i yi取整,得到像素集 { x i , y i , r } \{x_i, y_{i,r}\} {xi,yi,r}
特点
- 直观,但算法复杂度高,计算速度满,因为每一步需要一次浮点乘法、浮点加法和一次取整运算。
- 容易造成隔行显示。
3.2 DDA算法
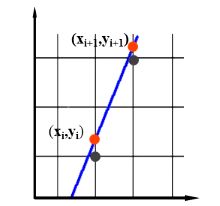
- 增量算法:在一个迭代算法中,如果每一步的 x , y x, y x,y值是用前一步的加上一个增量来获得,则称为增量算法。
- DDA(Digital DIfferential Analyzer, 数值微分法)算法就是一个增量算法。
特点:
- 当 x x x每递增1, y y y递增 k k k(即直线斜率)。
- y i − 1 y_{i-1} yi−1由 y i y_i yi得到,不需要通过直线方程进行计算,避免了浮点乘法运算。
- ∣ k ∣ > 1 |k|>1 ∣k∣>1时,仍然避免不了隔行现实的问题。
- y 、 k y、k y、k必须是浮点数,且每一步都必须对 y y y进行舍入取整,不利于硬件实现。
避免隔行显示:
y i = k x i + b y i + 1 = k x i + 1 + b = k ( x i + 1 ) + b = k x i + k + b = k x i + b + k y_i = kx_i + b \\ \qquad y_{i+1} = kx_{i+1} + b \\ \qquad \qquad \quad \ \ \ = k(x_i + 1) + b \\ \qquad \qquad \quad= kx_i + k + b \\ \qquad \qquad \quad= kx_i + b + k yi=kxi+byi+1=kxi+1+b =k(xi+1)+b=kxi+k+b=kxi+b+k
void DDALine(int x_0, int y_0, int x_1, int y_1, int color) {
int x;
float dx, dy, y, k;
dx = x_1 - x_0, dy = y_1 - y_0;
k = dy / dx, y = y_0;
for (x = x_0; x <= x_1; x++) {
drawpixel(x, int(y + 0.5), color);
y = y + k;
}
}
3.3 中点算法
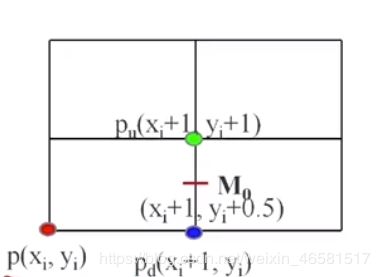
假定直线斜率 0 < k < 1 0
- 直线方程: A x + B y + C = 0 Ax + By + C = 0 Ax+By+C=0,令 d = A ( x i + 1 ) + B ( y i + 0.5 ) + C d = A(x_i + 1) + B(y_i + 0.5) + C d=A(xi+1)+B(yi+0.5)+C
- d > 0 d > 0 d>0, M M M在 Q Q Q的上方——> P 1 P_1 P1离直线更近——>取 P 1 P_1 P1。
- d < 0 d < 0 d<0, M M M在 Q Q Q的下方——> P 2 P_2 P2离直线更近——>取 P 2 P_2 P2。
- M M M与 Q Q Q重合, P 1 P_1 P1、 P 2 P_2 P2任取一点。
表达式:
y = { y + 1 ( d < 0 ) y ( d ≥ 0 ) y = \begin{cases} y + 1 \qquad \ (d < 0) \\ y \qquad \qquad (d \ge 0) \end{cases} y={y+1 (d<0)y(d≥0)
d i = A ( x i + 1 ) + B ( y i + 0.5 ) + C A = y 0 − y 1 B = x 1 − x 0 C = x 0 y 1 − x 1 y 0 d_i = A(x _ i + 1) + B(y_i + 0.5) + C \\ A = y_0 - y_1 \\ B = x_1 - x_0 \\ C = x_0y_1 - x_1y_0 di=A(xi+1)+B(yi+0.5)+CA=y0−y1B=x1−x0C=x0y1−x1y0
能否采用增量计算,提高运算效率?
d i + 1 = d i + ? d_{i+1} = d_i + ? di+1=di+?
d d d是 x , y x, y x,y的线性函数,采用增量计算是可行的。
d d d值的递推公式
d 0 = F ( x m 0 , y m 0 ) = F ( x i + 1 , y i + 0.5 ) = A ( x i + 1 ) + B ( y i + 0.5 ) + C d_0 = F(x_{m0}, y_{m0}) \\ \qquad \quad \ \ \ \ = F(x_i + 1, y_i + 0.5) \\ \qquad \qquad \qquad \qquad = A(x_i + 1) + B(y_i + 0.5) + C d0=F(xm0,ym0) =F(xi+1,yi+0.5)=A(xi+1)+B(yi+0.5)+C
d < 0 d < 0 d<0
d 1 = F ( x m 1 , y m 1 ) = F ( x i + 2 , y i + 1.5 ) = A ( x i + 1 ) + B ( y i + 0.5 ) + C + A + B = d 0 + A + B d_1 = F(x_{m1}, y_{m1}) \\ \qquad \quad \ \ \ \ = F(x_i + 2, y_i + 1.5) \\ \qquad \qquad \qquad \qquad \qquad \qquad \ = A(x_i + 1) + B(y_i + 0.5) + C + A + B \\ \ \ \ = d_0 + A + B d1=F(xm1,ym1) =F(xi+2,yi+1.5) =A(xi+1)+B(yi+0.5)+C+A+B =d0+A+B
d ≥ 0 d \ge 0 d≥0
d 1 = F ( x m 1 , y m 1 ) = F ( x i + 2 , y i + 0.5 ) = A ( x i + 1 ) + B ( y i + 0.5 ) + C + A = d 0 + A d_1 = F(x_{m1}, y_{m1}) \\ \qquad \quad \ \ \ \ = F(x_i + 2, y_i + 0.5) \\ \qquad \qquad \qquad \qquad \qquad \ \ = A(x_i + 1) + B(y_i + 0.5) + C + A \\ = d_0 + A d1=F(xm1,ym1) =F(xi+2,yi+0.5) =A(xi+1)+B(yi+0.5)+C+A=d0+A
计算 d d d的初始值 d 0 d_0 d0,直线的第一个像素 P 0 ( x 0 , y 0 ) P_0(x_0,y_0) P0(x0,y0)在直线上,因此相应的 d d d的初始值计算如下:
d 0 = F ( x 0 + 1 , y 0 + 0.5 ) = A ( x 0 + 1 ) + B ( y 0 + 0.5 ) + C = A x 0 + B y 0 + C + A + 0.5 B = A + 0.5 B d_0 = F(x_0 + 1, y_0 + 0.5) \\ \qquad \qquad \quad \ \ = A(x_0 + 1) + B(y_0 + 0.5) + C \\ \qquad \qquad \quad= Ax_0 + By_0 + C + A + 0.5B \\ = A + 0.5B d0=F(x0+1,y0+0.5) =A(x0+1)+B(y0+0.5)+C=Ax0+By0+C+A+0.5B=A+0.5B
d n e w = { d o l d + A + B d < 0 d o l d + A d ≥ 0 d 0 = A + 0.5 B d_{new} = \begin{cases} d_{old} + A + B \quad d < 0 \\ d_{old} + A \qquad \quad d \ge 0 \end{cases} \qquad d_0 = A + 0.5B dnew={dold+A+Bd<0dold+Ad≥0d0=A+0.5B
特点:
- A x + B y + C = 0 Ax + By + C = 0 Ax+By+C=0,使用一般式方程
- 通过判中点的符号,最终可以只进行整数加法
void Midpoint_Line(int x_0, int y_0, int x_1, int y_1, int color) {
int a, b, d_1, d_2, d, x, y;
a = y_0 - y_1, b = x_1 - x_0, d = 2 * a + b;
d_1 = 2 * a, d_2 = 2 * (a + b);
x = x_0, y = y_0;
drawpixel(x, y, color);
while (x < x_1) {
if (d < 0) {
x++;
y++;
d += d_2;
}
else {
x++;
d += d_1;
}
drawpixel(x, y, color);
}
}
3.4 Bresenham
基本思想
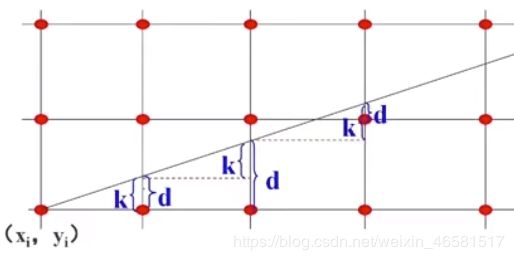
通过各行、各列像素中心构造一组虚拟网络线,按照直线起点到终点的顺序,计算直线与各垂直网格线的交点,然后根据误差项的符号确定该列像素中与此交点最近的像素。
假设每次 x + 1 , y x+1,y x+1,y的递增(减)量为0或1,它取决于实际直线与最近光栅网格点的距离,这个距离的最大误差为0.5。误差项d的初值 d 0 = 0 d_0 = 0 d0=0
d = d + k d = d + k d=d+k
一旦 d ≥ 1 d \ge 1 d≥1,就把它减去1,保证d的相对性,且在0、1之间。
{ x i + 1 = x i + 1 y i + 1 = { y i + 1 ( d > 0.5 ) y i ( d ≤ 0.5 ) \begin{cases} x_{i+1} = x_i + 1 \\ y_{i+1} = \begin{cases} y_i + 1 \quad (d > 0.5)\\ y_i \qquad \ \ \ (d \leq 0.5) \end{cases} \end{cases} ⎩⎪⎨⎪⎧xi+1=xi+1yi+1={yi+1(d>0.5)yi (d≤0.5)
如何把这个算法的效率也提高到整数加法?
改进1
令 e = d − 0.5 e = d - 0.5 e=d−0.5
{ x i + 1 = x i + 1 y i + 1 = { y i + 1 ( e > 0 ) y i ( e ≤ 0 ) \begin{cases} x_{i + 1} = x _ i + 1 \\ y_{i + 1} = \begin{cases} y_i + 1 \quad (e > 0) \\ y_i \qquad \ \ \ (e \leq 0) \end{cases} \end{cases} ⎩⎪⎨⎪⎧xi+1=xi+1yi+1={yi+1(e>0)yi (e≤0)
e = 0 e = 0 e=0时,可任取上、下光栅点显示
- e 初 = − 0.5 e_初 = -0.5 e初=−0.5
- 每走一步有 e = e + k e = e + k e=e+k
- if (e > 0) then e = e - 1
k = d y d x k = \frac{dy}{dx} k=dxdy
改进2
由于算法中只用到误差项的符号,于是可以用 e × 2 × Δ x e \times 2 \times \Delta x e×2×Δx来替换 e e e
- e 初 = − Δ x e_初 = - \Delta x e初=−Δx
- 每走一步有: e = e + 2 Δ y e = e + 2 \Delta y e=e+2Δy
- if (e > 0) then e = e - 2 Δ \Delta Δx
算法步骤:
- 输入直线的两端点 P 0 ( x 0 , y 0 ) P_0(x_0, y_0) P0(x0,y0)和 P 1 ( x 1 , y 1 ) P_1(x_1, y_1) P1(x1,y1)
- 计算初始值 Δ x 、 Δ y 、 e = − Δ x 、 x = x 0 、 y = y 0 \Delta x、\Delta y、e=-\Delta x、x = x_0、y = y_0 Δx、Δy、e=−Δx、x=x0、y=y0
- 绘制点 ( x , y ) (x, y) (x,y)
- e e e更新为 e + 2 Δ y e+2 \Delta y e+2Δy,判断 e e e的符号。若 e > 0 e > 0 e>0,则 ( x , y ) (x, y) (x,y)更新为 ( x + 1 , y + 1 ) (x+ 1, y + 1) (x+1,y+1),同时将 e e e更新为 e − 2 Δ x e - 2 \Delta x e−2Δx;否则 ( x , y ) (x, y) (x,y)更新为 ( x + 1 , y ) (x + 1, y) (x+1,y)
- 当直线没有画完时,重复步骤3和4。否则结束。