OpenCV—Python HOG方向梯度直方图 cv2.HOGDescriptor() 使用
文章目录
- numpy实现HOG算法
- 直接调用
- 计算HOG特征模块参数详情
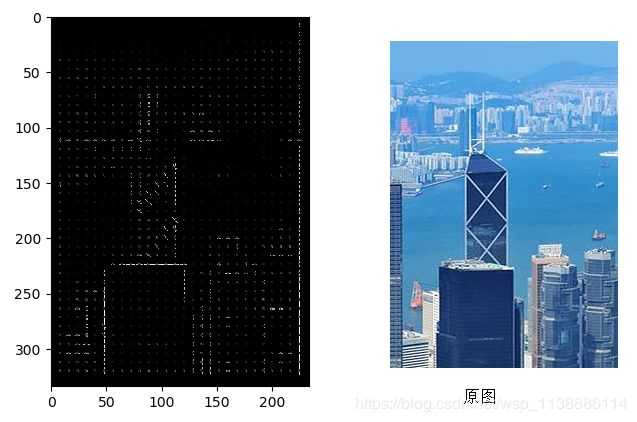
numpy实现HOG算法
import cv2
import numpy as np
import math
import matplotlib.pyplot as plt
class Hog_descriptor():
def __init__(self, img, cell_size=16, bin_size=8):
self.img = img
self.img = np.sqrt(img / np.max(img))
self.img = img * 255
self.cell_size = cell_size
self.bin_size = bin_size
self.angle_unit = 360 // self.bin_size
assert type(self.bin_size) == int, "bin_size should be integer,"
assert type(self.cell_size) == int, "cell_size should be integer,"
assert type(self.angle_unit) == int, "bin_size should be divisible by 360"
def extract(self):
height, width = self.img.shape
gradient_magnitude, gradient_angle = self.global_gradient()
gradient_magnitude = abs(gradient_magnitude)
cell_gradient_vector = np.zeros((height // self.cell_size, width // self.cell_size, self.bin_size))
for i in range(cell_gradient_vector.shape[0]):
for j in range(cell_gradient_vector.shape[1]):
cell_magnitude = gradient_magnitude[i * self.cell_size:(i + 1) * self.cell_size,
j * self.cell_size:(j + 1) * self.cell_size]
cell_angle = gradient_angle[i * self.cell_size:(i + 1) * self.cell_size,
j * self.cell_size:(j + 1) * self.cell_size]
cell_gradient_vector[i][j] = self.cell_gradient(cell_magnitude, cell_angle)
hog_image = self.render_gradient(np.zeros([height, width]), cell_gradient_vector)
hog_vector = []
for i in range(cell_gradient_vector.shape[0] - 1):
for j in range(cell_gradient_vector.shape[1] - 1):
block_vector = []
block_vector.extend(cell_gradient_vector[i][j])
block_vector.extend(cell_gradient_vector[i][j + 1])
block_vector.extend(cell_gradient_vector[i + 1][j])
block_vector.extend(cell_gradient_vector[i + 1][j + 1])
mag = lambda vector: math.sqrt(sum(i ** 2 for i in vector))
magnitude = mag(block_vector)
if magnitude != 0:
normalize = lambda block_vector, magnitude: [element // magnitude for element in block_vector]
block_vector = normalize(block_vector, magnitude)
hog_vector.append(block_vector)
return hog_vector, hog_image
def global_gradient(self):
gradient_values_x = cv2.Sobel(self.img, cv2.CV_64F, 1, 0, ksize=5)
gradient_values_y = cv2.Sobel(self.img, cv2.CV_64F, 0, 1, ksize=5)
gradient_magnitude = cv2.addWeighted(gradient_values_x, 0.5, gradient_values_y, 0.5, 0)
gradient_angle = cv2.phase(gradient_values_x, gradient_values_y, angleInDegrees=True)
return gradient_magnitude, gradient_angle
# 每个细胞单元构建梯度方向直方图
def cell_gradient(self, cell_magnitude, cell_angle):
orientation_centers = [0] * self.bin_size
for i in range(cell_magnitude.shape[0]):
for j in range(cell_magnitude.shape[1]):
gradient_strength = cell_magnitude[i][j]
gradient_angle = cell_angle[i][j]
min_angle, max_angle, mod = self.get_closest_bins(gradient_angle)
orientation_centers[min_angle] += (gradient_strength * (1 - (mod / self.angle_unit)))
orientation_centers[max_angle] += (gradient_strength * (mod / self.angle_unit))
return orientation_centers
def get_closest_bins(self, gradient_angle):
idx = int(gradient_angle / self.angle_unit)
mod = gradient_angle % self.angle_unit
return idx, (idx + 1) % self.bin_size, mod
def render_gradient(self, image, cell_gradient):
cell_width = self.cell_size / 2
max_mag = np.array(cell_gradient).max()
for x in range(cell_gradient.shape[0]):
for y in range(cell_gradient.shape[1]):
cell_grad = cell_gradient[x][y]
cell_grad /= max_mag
angle = 0
angle_gap = self.angle_unit
for magnitude in cell_grad:
angle_radian = math.radians(angle)
x1 = int(x * self.cell_size + magnitude * cell_width * math.cos(angle_radian))
y1 = int(y * self.cell_size + magnitude * cell_width * math.sin(angle_radian))
x2 = int(x * self.cell_size - magnitude * cell_width * math.cos(angle_radian))
y2 = int(y * self.cell_size - magnitude * cell_width * math.sin(angle_radian))
cv2.line(image, (y1, x1), (y2, x2), int(255 * math.sqrt(magnitude)))
angle += angle_gap
return image
img = cv2.imread('./gggg/001.png', cv2.IMREAD_GRAYSCALE)
hog = Hog_descriptor(img, cell_size=8, bin_size=8)
vector, image = hog.extract()
print (np.array(vector).shape)
plt.imshow(image, cmap=plt.cm.gray)
plt.show()
直接调用
def createTrainingInstances(self, images):
start = time.time()
hog = cv2.HOGDescriptor() # 初始化
instances = []
for img, label in images:
img = read_color_image(img) #函数未知
img = cv2.resize(img, (128, 128), interpolation = cv2.INTER_AREA)
descriptor = hog.compute(img)
if descriptor is None:
descriptor = []
else:
descriptor = descriptor.ravel()
pairing = Instance(descriptor, label)
instances.append(pairing)
end = time.time() - start
self.training_instances = instances
print "HOG TRAIN SERIAL: %d images -> %f" % (len(images), end)
https://github.com/achintyagopal/PaintingToArtists/blob/master/P2AParallel/HOG.py
计算HOG特征模块参数详情
def hog_compute(ims):
samples=[]
winSize = (64,64)
blockSize = (16,16)
blockStride = (8,8)
cellSize = (8,8)
nbins = 9
derivAperture = 1
winSigma = 4.
histogramNormType = 0
L2HysThreshold = 2.0000000000000001e-01
gammaCorrection = 0
nlevels = 64
hog = cv2.HOGDescriptor(winSize,blockSize,blockStride,cellSize,nbins,derivAperture,winSigma,
histogramNormType,L2HysThreshold,gammaCorrection,nlevels)
#compute(img[, winStride[, padding[, locations]]]) -> descriptors
winStride = (8,8)
padding = (8,8)
locations = ((10,20),(30,30),(50,50),(70,70),(90,90),(110,110),(130,130),(150,150),(170,170),(190,190))
for im in ims:
hist = hog.compute(im,winStride,padding,locations)
samples.append(hist)
return np.float32(samples)
def compute_hog(image, locations):
hog = cv2.HOGDescriptor()
winStride = (8, 8)
padding = (8, 8)
hist = hog.compute(image, winStride, padding, locations)
return hist
参考与技术关联
https://www.cnblogs.com/long5683/p/9735903.html
https://blog.csdn.net/yongjiankuang/article/details/79808346