STM32学习笔记一一输入捕获
1.概述
输入捕获模式可以用来测量脉冲宽度或者测量频率。STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能。 STM32 的输入捕获,简单的说就是通过检测 TIMx_CHx 上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的通道的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。同时还可以配置捕获时是否触发中断/DMA 等。
2.思路
高电平捕获:先设置输入捕获为上升沿检测,记录发生上升沿的时候 TIM2_CNT 的值。然后配置捕获信号为下降沿捕获,当下降沿到来时,发生捕获,并记录此时的 TIM2_CNT 值。这样,前后两次 TIM2_CNT 之差,就是高电平的脉宽,同时 TIM2 的计数频率我们是知道的,从而可以计算出高电平脉宽的准确时间。
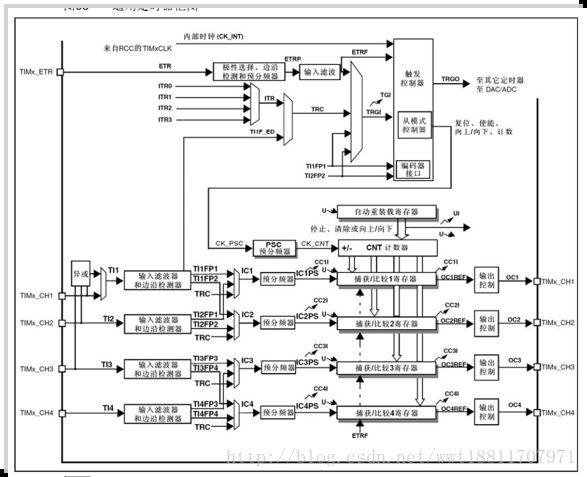
工作过程:通过检测TIMx_CHx上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。

3.寄存器介绍
3.1 TIMx_ARR 和 TIMx_PSC
这两个寄存器用来设自动重装载值和 TIMx 的时钟分频。
介绍—->STM32学习笔记一一定时器中断
3.2 TIMx_CCMR1
捕获/比较模式寄存器:各位描述如图:

当在输入捕获模式下使用的时候,对应图 第二行描述,从图中可以看出,TIMx_CCMR1 是针对 2 个通道的配置,低八位[7: 0]用于捕获/比较通道 1 的控制,而高八位[15: 8]则用于捕获/比较通道 2 的控制,因为 TIMx 还有 CCMR2 这个寄存器,可知道CCMR2 是用来控制通道 3 和通道 4。
实验使用TIM2 的捕获/比较通道 1,重点介绍 TIMx_CMMR1 的[7:0]位:

CC1S[1:0]:这两个位用于 CCR1 的通道方向配置, 这里我们设置 IC1S[1:0]=01,即
是配置为输入,且 IC1 映射在 TI1 上, CC1 即对应 TIMx_CH1。
IC1PSC[1:0]:输入捕获 1 预分频器。这里是 1 次边沿就触发 1 次捕获,所以选择 00 就是了。
IC1F[3:0]:输入捕获 1 滤波器。这个用来设置输入采样频率和数字滤波器长度。其中,![]() 是定时器的输入频率(TIMxCLK),一般为 72Mhz,而
是定时器的输入频率(TIMxCLK),一般为 72Mhz,而  则是根据 TIMx_CR1 的 CKD[1:0]的设置来确定的,如果 CKD[1:0]设置为 00,那么
则是根据 TIMx_CR1 的 CKD[1:0]的设置来确定的,如果 CKD[1:0]设置为 00,那么 ![]() 。 N 值就是滤波长度,举个简单的例子:假设 IC1F[3:0]=0011,并设置 IC1 映射到通道 1 上,且为上升沿触发,那么在捕获到上升沿的时候,再以
。 N 值就是滤波长度,举个简单的例子:假设 IC1F[3:0]=0011,并设置 IC1 映射到通道 1 上,且为上升沿触发,那么在捕获到上升沿的时候,再以 ![]() 的频率,连续采样到 8 次通道 1 的电平,如果都是高电平,则说明确实是一个有效的触发,就会触发输入捕获中断(如果开启了的话)。这样可以滤除那些高电平脉宽低于 8 个采样周期的脉冲信号,从而达到滤波的效果。这里,我们不做滤波处理,所以设置 IC1F[3:0]=0000,只要采集到上升沿,就触发捕获。
的频率,连续采样到 8 次通道 1 的电平,如果都是高电平,则说明确实是一个有效的触发,就会触发输入捕获中断(如果开启了的话)。这样可以滤除那些高电平脉宽低于 8 个采样周期的脉冲信号,从而达到滤波的效果。这里,我们不做滤波处理,所以设置 IC1F[3:0]=0000,只要采集到上升沿,就触发捕获。
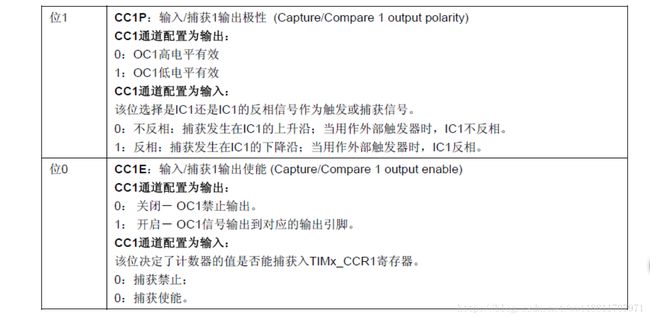
3.3 TIMx_CCER:
捕获/比较使能寄存器,此处使用到这个寄存器的最低 2 位, CC1E 和 CC1P 位。如下图:
3.4 TIMx_DIER:
DMA/中断使能寄存器。

我们同样仅关心它的第 0 位, 该位是更新中断允许位, 当定时器的更新中断, 该位要设置为 1,来允许由于更新事件所产生的中断。
3.5 TIMx_CCR1:
捕获/比较寄存器 1。该寄存器用来存储捕获发生时, TIMx_CNT的值,我们从 TIMx_CCR1 就可以读出通道 1 捕获发生时刻的 TIMx_CNT 值,通过两次捕获(一次上升沿捕获,一次下降沿捕获)的差值,就可以计算出高电平脉冲的宽度。
4. 配置步骤
4.1 开启 TIM2 时钟,配置 PA0 为下拉输入。
要使用 TIM2,我们必须先开启 TIM2 的时钟。这里我们还要配置 PA0 为下拉输入,因为
我们要捕获 TIM2_CH1 上面的高电平脉宽,而 TIM2_CH1 是连接在 PA0 上面的。
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能 TIM2 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能 GPIOA 时钟
4.2 初始化 TIM2, 设置 TIM2 的 ARR 和 PSC
在开启了 TIM2 的时钟之后,我们要设置 ARR 和 PSC 两个寄存器的值来设置输入捕获的自动重装载值和计数频率。 这在库函数中是通过 TIM_TimeBaseInit 函数实现的。
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM 向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据指定的参数初始化 Tim2
4.3 设置 TIM2 的输入比较参数,开启输入捕获
输入比较参数的设置包括映射关系,滤波,分频以及捕获方式等。这里我们需要设置通道 1为输入模式,且 IC1 映射到 TI1(通道 1)上面,并且不使用滤波(提高响应速度)器,上升沿捕获。库函数是通过 TIM_ICInit 函数来初始化输入比较参数的:
void TIM_ICInit(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct);
参数设置结构体 TIM_ICInitTypeDef 的定义:
typedef struct
{
uint16_t TIM_Channel;
uint16_t TIM_ICPolarity;
uint16_t TIM_ICSelection;
uint16_t TIM_ICPrescaler;
uint16_t TIM_ICFilter;
} TIM_ICInitTypeDef;
参数 TIM_Channel :用来设置通道。我们设置为通道 1,为 TIM_Channel_1。
参 数 TIM_ICPolarity :是 用 来 设 置 输 入 信 号 的 有 效 捕 获 极 性 , 这 里 我 们 设 置 为
TIM_ICPolarity_Rising,上升沿捕获。同时库函数还提供了单独设置通道 1 捕获极性的函数为:
TIM_OC1PolarityConfig(TIM2,TIM_ICPolarity_Falling)
这表示通道 1 为上升沿捕获,同时对于其他三个通道也有一个类似的函数,使用的时候一定要分清楚使用的是哪个通道该调用哪个函数,格式为 TIM_OCxPolarityConfig()。
参数 TIM_ICSelection: 是用来设置映射关系,我们配置 IC1 直接映射在 TI1 上,选择
TIM_ICSelection_DirectTI。
参 数 TIM_ICPrescaler: 用 来 设 置 输 入 捕 获 分 频 系 数 , 我 们 这 里 不 分 频 , 所 以 选 中TIM_ICPSC_DIV1,此外,还有 2,4,8 分频可选。
参数 TIM_ICFilter: 设置滤波器长度,这里我们不使用滤波器,所以设置为 0。
配置代码:
TIM_ICInitTypeDef TIM2_ICInitStructure;
TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择输入端 IC1 映射到 TI1 上
TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到 TI1 上
TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM5_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波
TIM_ICInit(TIM2, &TIM2_ICInitStructure);4.4 使能捕获和更新中断(设置 TIM2 的 DIER 寄存器)
因为我们要捕获的是高电平信号的脉宽,所以,第一次捕获是上升沿,第二次捕获时下降
沿,必须在捕获上升沿之后, 设置捕获边沿为下降沿,同时,如果脉宽比较长,那么定时器就会溢出,对溢出必须做处理,否则结果就不准了。这两件事,我们都在中断里面做,所以必须
开启捕获中断和更新中断。这里我们使用定时器的开中断函数 TIM_ITConfig 即可使能捕获和更新中断:
TIM_ITConfig( TIM2,TIM_IT_Update|TIM_IT_CC1,ENABLE);//允许更新中断和捕获中断4.5 设置中断分组,编写中断服务函数
设置中断分组主要是通过函数 NVIC_Init()来完成。分组完成后,还需要在中断函数里面完成数据处理和捕获设置等关键操作,从而实现高电平脉宽统计。在中断服务函数里面,在中断开始的时候要进行中断类型判断,在中断结束的时候要清除中断标志位。使用到的函数分别为 :
TIM_GetITStatus()函数和 TIM_ClearITPendingBit()函数。
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET){}//判断是否为更新中断
if (TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET){}//判断是否发生捕获事件
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1|TIM_IT_Update);//清除中断和捕获标志位
4.6 使能定时器(设置 TIM2 的 CR1 寄存器)
最后,必须打开定时器的计数器开关, 启动 TIM5 的计数器,开始输入捕获TIM_Cmd(TIM2,ENABLE ); //使能定时器 2通过以上 6 步设置,定时器 2 的通道 1 就可以开始输入捕获了。
5.实现代码
5.1 定时器 2 通道 1 输入捕获配置:
TIM_ICInitTypeDef TIM2_ICInitStructure;
void TIM2_Cap_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能 TIM2 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能 GPIOA 时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PA0 清除之前设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_0); //PA0 下拉
//初始化定时器 2 TIM2
TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //初始化 TIMx 的时间基数单位
//初始化 TIM2 输入捕获参数
TIM2_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择输入端 IC1 映射到 TI1 上
TIM2_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM2_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到 TI1 上
TIM2_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM2_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波
TIM_ICInit(TIM2, &TIM2_ICInitStructure);
//中断分组初始化
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //TIM2 中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级 2 级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级 0 级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ 通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化外设 NVIC 寄存器
TIM_ITConfig(TIM2,TIM_IT_Update|TIM_IT_CC1,ENABLE);
//允许更新中断 CC1IE 捕获中断
TIM_Cmd(TIM2,ENABLE ); //使能定时器 2
}
5.2 定时器 5 中断服务程序
u8 TIM2CH1_CAPTURE_STA=0; //输入捕获状态
u16 TIM2CH1_CAPTURE_VAL;//输入捕获值
//定时器 5 中断服务程序
void TIM2_IRQHandler(void)
{
if((TIM2CH1_CAPTURE_STA&0X80)==0)//还未成功捕获
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
if(TIM2CH1_CAPTURE_STA&0X40)//已经捕获到高电平了
{
if((TIM2CH1_CAPTURE_STA&0X3F)==0X3F)//高电平太长了
{
TIM2CH1_CAPTURE_STA|=0X80;//标记成功捕获了一次
TIM2CH1_CAPTURE_VAL=0XFFFF;
}
else
TIM2CH1_CAPTURE_STA++;
}
}
if (TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET)//捕获 1 发生捕获事件
{
if(TIM2CH1_CAPTURE_STA&0X40) //捕获到一个下降沿
{
TIM2CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次上升沿
TIM2CH1_CAPTURE_VAL=TIM_GetCapture1(TIM2);
TIM_OC1PolarityConfig(TIM2,TIM_ICPolarity_Rising);
//CC1P=0 设置为上升沿捕获
}
else //还未开始,第一次捕获上升沿
{
TIM2CH1_CAPTURE_STA=0; //清空
TIM2CH1_CAPTURE_VAL=0;
TIM_SetCounter(TIM2,0);
TIM2CH1_CAPTURE_STA|=0X40; //标记捕获到了上升沿
TIM_OC1PolarityConfig(TIM2,TIM_ICPolarity_Falling);
//CC1P=1 设置为下降沿捕获
}
}
}
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1|TIM_IT_Update); //清除中断标志位
}
注:
TIM2CH1_CAPTURE_STA:是用来记录捕获状态,把它当成一个寄存器那样
来使用。 TIM2CH1_CAPTURE_STA 各位描述下表 所示:

TIM2CH1_CAPTURE_VAL:则用来记录捕获到下降沿的时候, TIM2_CNT的值。
捕获高电平脉宽的思路:
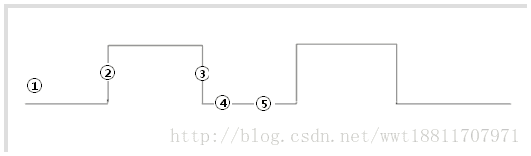
首先,设置 TIM2_CH1 捕获上升沿,这在TIM2_Cap_Init 函数执行的时候就设置好了,然后等待上升沿中捕获断到来, 当捕获到上升沿中断, 此时如果 TIM2CH1_CAPTURE_STA 的第 6 位为 0, 则表示还没有捕获到新的上升沿,就先把 TIM2CH1_CAPTURE_STA、 TIM2CH1_CAPTURE_VAL 和 TIM2->CNT 等清零,然后再设置 TIM2CH1_CAPTURE_STA 的第 6 位为 1, 标记捕获到高电平, 最后设置为下降沿捕获,等 待 下 降 沿 到 来 。 如 果 等 待 下 降 沿 到 来 期 间 , 定 时 器 发 生 了 溢 出 , 就 在TIM2CH1_CAPTURE_STA 里面对溢出次数进行计数,当最大溢出次数来到的时候,就强制标记 捕 获 完 成 ( 虽 然 此 时 还 没 有 捕 获 到 下 降 沿 )。 当 下 降 沿 到 来 的 时 候 , 先 设 置TIM2CH1_CAPTURE_STA 的第 7 位为 1,标记成功捕获一次高电平,然后读取此时的定时器的捕获值到 TIM2CH1_CAPTURE_VAL 里面,最后设置为上升沿捕获,回到初始状态。这样,我们就完成一次高电平捕获了,只要 TIM2CH1_CAPTURE_STA 的第 7 位一直为 1,那么就不会进行第二次捕获,我们在 main函数处理完捕获数据后,将 TIM2CH1_CAPTURE_STA置零,就可以开启第二次捕获。
5.3 主函数实现
extern u8 TIM2CH1_CAPTURE_STA; //输入捕获状态
extern u16 TIM2CH1_CAPTURE_VAL;//输入捕获值
int main(void)
{
u32 temp=0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置 NVIC 中断分组 2:2 位抢占优
先级, 2 位响应优先级
delay_init(); //延时函数初始化
uart_init(9600); //串口初始化为 9600
LED_Init(); //初始化与 LED 连接的硬件接口
TIM1_PWM_Init(899,0); //不分频。 PWM 频率=72000/(899+1)=80Khz
TIM2_Cap_Init(0XFFFF,72-1); //以 1Mhz 的频率计数
while(1)
{
delay_ms(10);
TIM_SetCompare1(TIM1,TIM_GetCapture1(TIM1)+1);
if(TIM_GetCapture1(TIM1)==300)TIM_SetCompare1(TIM1,0);
if(TIM2CH1_CAPTURE_STA&0X80)//成功捕获到了一次高电平
{
temp=TIM2CH1_CAPTURE_STA&0X3F;
temp*=65536; //溢出时间总和
temp+=TIM2CH1_CAPTURE_VAL; //得到总的高电平时间
printf("HIGH:%d us\r\n",temp); //打印总的高点平时间
TIM2CH1_CAPTURE_STA=0; //开启下一次捕获
}
}
}
参考:
1.正点原子库函数版本实现