STM32使用cubemx、HAL库硬件SPI驱动ICM20602
软件平台:cubemx mdk
硬件平台:stm32f103rct6 ICM20602
工程源代码链接:
https://download.csdn.net/download/wwwlyj123321/10998420
一、配置总览
如下图所示:使用外部8m晶振,使用sw调试下载,使用串口1作为打印信息的输出,spi2连接ICM206002

MISO是master in slave output
MOSI是master output slave in
二、SPI配置
SPI为全双工,硬件NSS关闭
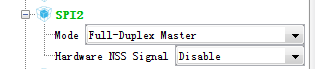
数据位为8位,CPHA为数据线的第一个变化沿,软件控制NSS,最高位先发送,CRC关闭

再配置PA8为普通io口,作为片选

三、ICM20602驱动
主要使用HAL_SPI_TransmitReceive函数对ICM20602的寄存器进行读写操作。
#include "icm20602.h"
//========ICM20602寄存器地址========================
/********************************************
*复位后所有寄存器地址都为0,除了
*Register 26 CONFIG = 0x80
*Register 107 Power Management 1 = 0x41
*Register 117 WHO_AM_I = 0x12
*********************************************/
//陀螺仪温度补偿
#define ICM20_XG_OFFS_TC_H 0x04
#define ICM20_XG_OFFS_TC_L 0x05
#define ICM20_YG_OFFS_TC_H 0x07
#define ICM20_YG_OFFS_TC_L 0x08
#define ICM20_ZG_OFFS_TC_H 0x0A
#define ICM20_ZG_OFFS_TC_L 0x0B
//加速度自检输出(出产时设置,用于与用户的自检输出值比较)
#define ICM20_SELF_TEST_X_ACCEL 0x0D
#define ICM20_SELF_TEST_Y_ACCEL 0x0E
#define ICM20_SELF_TEST_Z_ACCEL 0x0F
//陀螺仪静态偏移
#define ICM20_XG_OFFS_USRH 0x13
#define ICM20_XG_OFFS_USRL 0x14
#define ICM20_YG_OFFS_USRH 0x15
#define ICM20_YG_OFFS_USRL 0x16
#define ICM20_ZG_OFFS_USRH 0x17
#define ICM20_ZG_OFFS_USRL 0x18
#define ICM20_SMPLRT_DIV 0x19
#define ICM20_CONFIG 0x1A
#define ICM20_GYRO_CONFIG 0x1B
#define ICM20_ACCEL_CONFIG 0x1C
#define ICM20_ACCEL_CONFIG2 0x1D
#define ICM20_LP_MODE_CFG 0x1E
//运动唤醒加速度阈值
#define ICM20_ACCEL_WOM_X_THR 0x20
#define ICM20_ACCEL_WOM_Y_THR 0x21
#define ICM20_ACCEL_WOM_Z_THR 0x22
#define ICM20_FIFO_EN 0x23
#define ICM20_FSYNC_INT 0x36
#define ICM20_INT_PIN_CFG 0x37
//#define ICM20_INT_ENABLE 0x38
#define ICM20_FIFO_WM_INT_STATUS 0x39
#define ICM20_INT_STATUS 0x3A
//加速度输出
#define ICM20_ACCEL_XOUT_H 0x3B
#define ICM20_ACCEL_XOUT_L 0x3C
#define ICM20_ACCEL_YOUT_H 0x3D
#define ICM20_ACCEL_YOUT_L 0x3E
#define ICM20_ACCEL_ZOUT_H 0x3F
#define ICM20_ACCEL_ZOUT_L 0x40
//温度输出
#define ICM20_TEMP_OUT_H 0x41
#define ICM20_TEMP_OUT_L 0x42
//角速度输出
#define ICM20_GYRO_XOUT_H 0x43
#define ICM20_GYRO_XOUT_L 0x44
#define ICM20_GYRO_YOUT_H 0x45
#define ICM20_GYRO_YOUT_L 0x46
#define ICM20_GYRO_ZOUT_H 0x47
#define ICM20_GYRO_ZOUT_L 0x48
//陀螺仪自检输出
#define ICM20_SELF_TEST_X_GYRO 0x50
#define ICM20_SELF_TEST_Y_GYRO 0x51
#define ICM20_SELF_TEST_Z_GYRO 0x52
#define ICM20_FIFO_WM_TH1 0x60
#define ICM20_FIFO_WM_TH2 0x61
#define ICM20_SIGNAL_PATH_RESET 0x68
#define ICM20_ACCEL_INTEL_CTRL 0x69
#define ICM20_USER_CTRL 0x6A
//电源控制
#define ICM20_PWR_MGMT_1 0x6B
#define ICM20_PWR_MGMT_2 0x6C
#define ICM20_I2C_IF 0x70
#define ICM20_FIFO_COUNTH 0x72
#define ICM20_FIFO_COUNTL 0x73
#define ICM20_FIFO_R_W 0x74
#define ICM20_WHO_AM_I 0x75
//加速度静态偏移
#define ICM20_XA_OFFSET_H 0x77
#define ICM20_XA_OFFSET_L 0x78
#define ICM20_YA_OFFSET_H 0x7A
#define ICM20_YA_OFFSET_L 0x7B
#define ICM20_ZA_OFFSET_H 0x7D
#define ICM20_ZA_OFFSET_L 0x7E
//===========================================================
extern SPI_HandleTypeDef hspi2;
static float _accel_scale;
static float _gyro_scale;
static uint8_t tx, rx;
static uint8_t tx_buff[14];
//static uint8_t mpu_buff[14];
#define ICM20602_ADDRESS 0xD2
uint8_t icm20602_read_buffer(uint8_t const regAddr, uint8_t *pData, uint8_t len)
{
HAL_GPIO_WritePin(CS_ICM_GPIO_Port, CS_ICM_Pin,0);
tx = regAddr | 0x80;
tx_buff[0] = tx;
HAL_SPI_TransmitReceive(&hspi2, &tx, &rx, 1, 55);
HAL_SPI_TransmitReceive(&hspi2, tx_buff, pData, len, 55);
HAL_GPIO_WritePin(CS_ICM_GPIO_Port, CS_ICM_Pin,1);
return 0;
}
uint8_t icm20602_write_reg(uint8_t reg,uint8_t val)
{
HAL_GPIO_WritePin(CS_ICM_GPIO_Port, CS_ICM_Pin,0);
tx = reg & 0x7F;
HAL_SPI_TransmitReceive(&hspi2, &tx, &rx, 1, 55);
tx = val;
HAL_SPI_TransmitReceive(&hspi2, &tx, &rx, 1, 55);
HAL_GPIO_WritePin(CS_ICM_GPIO_Port, CS_ICM_Pin,1);
return 0;
}
uint8_t icm20602_read_reg(uint8_t reg)
{
HAL_GPIO_WritePin(CS_ICM_GPIO_Port, CS_ICM_Pin,0);
tx = reg | 0x80;
HAL_SPI_TransmitReceive(&hspi2, &tx, &rx, 1, 55);
HAL_SPI_TransmitReceive(&hspi2, &tx, &rx, 1, 55);//这个应该是随便发一个数就行
HAL_GPIO_WritePin(CS_ICM_GPIO_Port, CS_ICM_Pin,1);//源代码发送的是ff
return rx;
}
uint8_t icm20602_init()
{
if(icm20602_write_reg(ICM20_PWR_MGMT_1,0x80)) //复位,复位后位0x41,睡眠模式,
{
puts("icm_20602 reset fail\r\n");
return 1;
}
HAL_Delay(50);
icm20602_write_reg(ICM20_PWR_MGMT_1,0x01); //关闭睡眠,自动选择时钟
HAL_Delay(50);
printf("icm_20602 id=%x\r\n",icm20602_read_reg(ICM20_WHO_AM_I));//读取ID
icm20602_write_reg(ICM20_SMPLRT_DIV,0); //分频数=为0+1,数据输出速率为内部采样速率
icm20602_write_reg(ICM20_CONFIG,DLPF_BW_20); //GYRO低通滤波设置
icm20602_write_reg(ICM20_ACCEL_CONFIG2,ACCEL_AVER_4|ACCEL_DLPF_BW_21); //ACCEL低通滤波设置
icm20602_set_accel_fullscale(ICM20_ACCEL_FS_8G);
icm20602_set_gyro_fullscale(ICM20_GYRO_FS_2000);
HAL_Delay(100);
printf("icm20602 init pass\r\n\r\n");
return 0;
}
uint8_t icm20602_set_gyro_fullscale(uint8_t fs)
{
switch(fs)
{
case ICM20_GYRO_FS_250:
_gyro_scale = 1.0f/131.068f; //32767/250
break;
case ICM20_GYRO_FS_500:
_gyro_scale = 1.0f/65.534f;
break;
case ICM20_GYRO_FS_1000:
_gyro_scale = 1.0f/32.767f;
break;
case ICM20_GYRO_FS_2000:
_gyro_scale = 1.0f/16.4f;
break;
default:
fs = ICM20_GYRO_FS_2000;
_gyro_scale = 1.0f/16.3835f;
break;
}
return icm20602_write_reg(ICM20_GYRO_CONFIG,fs);
}
uint8_t icm20602_set_accel_fullscale(uint8_t fs)
{
switch(fs)
{
case ICM20_ACCEL_FS_2G:
_accel_scale = 1.0f/16348.0f;
break;
case ICM20_ACCEL_FS_4G:
_accel_scale = 1.0f/8192.0f;
break;
case ICM20_ACCEL_FS_8G:
_accel_scale = 1.0f/4096.0f;
break;
case ICM20_ACCEL_FS_16G:
_accel_scale = 1.0f/2048.0f;
break;
default:
fs = ICM20_ACCEL_FS_8G;
_accel_scale = 1.0f/4096.0f;
break;
}
return icm20602_write_reg(ICM20_ACCEL_CONFIG,fs);
}
uint8_t icm20602_get_accel_adc(int16_t *accel)
{
uint8_t buf[6];
if(icm20602_read_buffer(ICM20_ACCEL_XOUT_H,buf,6))return 1;
accel[0] = ((int16_t)buf[0]<<8) + buf[1];
accel[1] = ((int16_t)buf[2]<<8) + buf[3];
accel[2] = ((int16_t)buf[4]<<8) + buf[5];
return 0;
}
uint8_t icm20602_get_gyro_adc(int16_t *gyro)
{
uint8_t buf[6];
if(icm20602_read_buffer(ICM20_GYRO_XOUT_H,buf,6))return 1;
gyro[0] = (buf[0]<<8) + buf[1];
gyro[1] = (buf[2]<<8) + buf[3];
gyro[2] = (buf[4]<<8) + buf[5];
return 0;
}
uint8_t icm20602_get_gyro(float *gyro)
{
int16_t gyro_adc[3];
if(icm20602_get_gyro_adc(gyro_adc))return 1;
gyro[0] = _gyro_scale * gyro_adc[0];
gyro[1] = _gyro_scale * gyro_adc[1];
gyro[2] = _gyro_scale * gyro_adc[2];
return 0;
}
uint8_t icm20602_get_accel(float *accel)
{
int16_t accel_adc[3];
if(icm20602_get_accel_adc(accel_adc))return 1;
accel[0] = _accel_scale * accel_adc[0];
accel[1] = _accel_scale * accel_adc[1];
accel[2] = _accel_scale * accel_adc[2];
return 0;
}
float icm20602_get_temp()
{
int16_t temp_adc;
uint8_t buf[2];
if(icm20602_read_buffer(ICM20_TEMP_OUT_H,buf,2))return 0.0f;
temp_adc = (buf[0]<<8)+buf[1];
return (25.0f + (float)temp_adc/326.8f);
}
#ifndef _ICM20602_H_
#define _ICM20602_H_
#include "main.h"
#include "stm32f1xx_hal.h"
#include "stdint.h"
//加速度量程
#define ICM20_ACCEL_FS_2G (0<<3)
#define ICM20_ACCEL_FS_4G (1<<3)
#define ICM20_ACCEL_FS_8G (2<<3)
#define ICM20_ACCEL_FS_16G (3<<3)
//角速度量程
#define ICM20_GYRO_FS_250 (0<<3)
#define ICM20_GYRO_FS_500 (1<<3)
#define ICM20_GYRO_FS_1000 (2<<3)
#define ICM20_GYRO_FS_2000 (3<<3)
//CONFIG DPF
#define DLPF_BW_250 0x00 //Rate=8k
#define DLPF_BW_176 0x01
#define DLPF_BW_92 0x02
#define DLPF_BW_41 0x03
#define DLPF_BW_20 0x04
#define DLPF_BW_10 0x05
#define DLPF_BW_5 0x06
#define DLPF_BW_328 0x06 //Rate=8k
//ACCEL_CONFIG2
#define ACCEL_AVER_4 (0x00<<4) //Rate=8k
#define ACCEL_AVER_8 (0x01<<4)
#define ACCEL_AVER_16 (0x02<<4)
#define ACCEL_AVER_32 (0x03<<4)
//ACCEL_DLPF
#define ACCEL_DLPF_BW_218 0x00
//#define ACCEL_DLPF_BW_218 0x01
#define ACCEL_DLPF_BW_99 0x02
#define ACCEL_DLPF_BW_44 0x03
#define ACCEL_DLPF_BW_21 0x04
#define ACCEL_DLPF_BW_10 0x05
#define ACCEL_DLPF_BW_5 0x06
#define ACCEL_DLPF_BW_420 0x06
uint8_t icm20602_init(void);
uint8_t icm20602_set_gyro_fullscale(uint8_t fs);
uint8_t icm20602_set_accel_fullscale(uint8_t fs);
uint8_t icm20602_get_accel_adc(int16_t *accel);
uint8_t icm20602_get_gyro_adc(int16_t *gyro);
uint8_t icm20602_get_gyro(float *gyro);
uint8_t icm20602_get_accel(float *accel);
float icm20602_get_temp(void);
#endif
四、实验效果
成功驱动icm20602,在主函数里将读取到的原始数据通过串口打印:

