OpenCV源码之高斯模糊GaussianBlur, getGaussianKernel
目录
getGaussianKernel
基本原理:
基本流程:
高斯模板创建过程
Step1:构建高斯矩阵
Step2:计算高斯矩阵的和
Step3:归一化
返回值
源码
结论:
参考文章:
getGaussianKernel
基本原理:
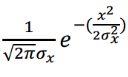
在数字图像处理中,一般取二维高斯函数为

由(1)可以知道,二维高斯函数,可以看成两个一维高斯函数乘积,因此先计算一维高斯模板,再计算需要的二维高斯模板。
基本流程:
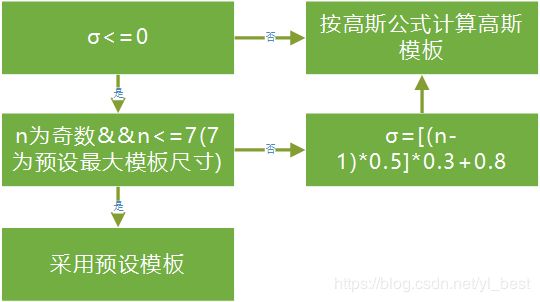
- 取固定系数
当kernels的尺寸为1,3,5,7 并且用户没有设置sigma的时候(sigma <= 0),就会取固定的系数.这是一种默认的值是高斯函数的近似.
- 按照高斯公式计算
当kernels尺寸超过7的时候,如果sigma设置合法(用户设置了sigma),则按照高斯公式计算.当sigma不合法(用户没有设置sigma),则按照sigma=((n-1)0.5 - 1)0.3 + 0.8计算.n为kernels的尺寸.
高斯模板创建过程
Step1:构建高斯矩阵
注意:后续归一化时系数会被去掉,所以会省略系数的计算,只计算
OpenCV中源码:
double x = i - (n-1)*0.5;
double t = fixed_kernel ? (double)fixed_kernel[i] : std::exp(scale2X*x*x);笔者修改后:可以参考下图
double sigmaX = sigma > 0 ? sigma : ((n - 1)*0.5 - 1)*0.3 + 0.8;
double scale2X = -0.5 / (sigmaX*sigmaX);
int center = (n - 1) *0.5;
for (int i = 0; i < n; i++)
{
double x = i - center;
double t = std::exp(scale2X*x*x);
}举例:n=7, sigma = 1,中心点center = (7-1)/2=3
Step2:计算高斯矩阵的和
Step3:归一化
矩阵中每一项/矩阵和
返回值
n行*1列的垂直方向的高斯核。水平方向的高斯核只需要对垂直方向高斯核进行转置即可。
源码
cv::Mat cv::getGaussianKernel( int n, double sigma, int ktype )
{
const int SMALL_GAUSSIAN_SIZE = 7;
//定义了固定的filter即Kernels.
static const float small_gaussian_tab[][SMALL_GAUSSIAN_SIZE] =
{
{1.f},
{0.25f, 0.5f, 0.25f},
{0.0625f, 0.25f, 0.375f, 0.25f, 0.0625f},
{0.03125f, 0.109375f, 0.21875f, 0.28125f, 0.21875f, 0.109375f, 0.03125f}
};
//对滤波器的类型进行判断,1,尺寸为奇数;2,尺寸小于等于7;3.sigma小于等于0(注)
const float* fixed_kernel = n % 2 == 1 && n <= SMALL_GAUSSIAN_SIZE && sigma <= 0 ?
small_gaussian_tab[n>>1] : 0;
//前文注释中介绍了,Kernels的数据类型为float,double也是ok的.
CV_Assert( ktype == CV_32F || ktype == CV_64F );
Mat kernel(n, 1, ktype);
float* cf = kernel.ptr();
double* cd = kernel.ptr();
//确定sigma,如果sigma > 0,ok,不用修改;否则按照公式计算(注)
double sigmaX = sigma > 0 ? sigma : ((n-1)*0.5 - 1)*0.3 + 0.8;
double scale2X = -0.5/(sigmaX*sigmaX);//高斯公式
double sum = 0;
int i;
for( i = 0; i < n; i++ )
{
double x = i - (n-1)*0.5;
//如果fixed_kernel为真,也就是符合上文中的3个条件,则区固定的系数;否则按照高斯公式计算
double t = fixed_kernel ? (double)fixed_kernel[i] : std::exp(scale2X*x*x);
//对kernels进行归一化
if( ktype == CV_32F )
{
cf[i] = (float)t;
sum += cf[i];
}
else
{
cd[i] = t;
sum += cd[i];
}
}
sum = 1./sum;
for( i = 0; i < n; i++ )
{
if( ktype == CV_32F )
cf[i] = (float)(cf[i]*sum);
else
cd[i] *= sum;
}
return kernel;
} 结论:
1. OpenCV的GaussianBlur本质上依然是filter2D,
只是针对一些特殊情况进行了GPU和CPU版本的优化,
如果输入的维度等信息不满足这些特殊情况,则选择使用filter2D进行计算
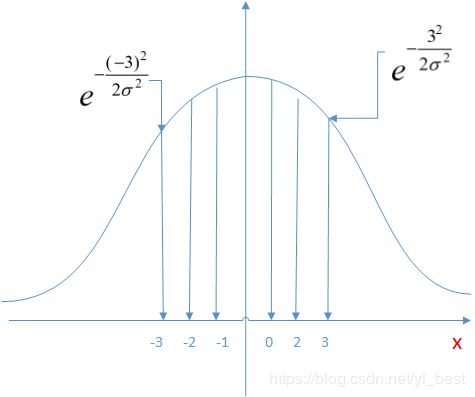
2. 根据高斯函数的分布特性,可以知道,函数分布在区间[u - 3 * sigma, u + 3 * sigma]范围内的概率大于99%.
因此模板大小的选取往往与sigma有关.
createGaussianKernels()代码中的公式,ksize = round(2 * 3 * sigma + 1) | 1; 注意与1按位或,是保证结果为奇数.另外需要注意,OpenCV认为当图像类型为CV_8U的时候能量集中区域为3 * sigma,
其他类型图像的能量集中区域为4*sigma.
参考文章:
《手撕OpenCV源码之高斯模糊》
https://cloud.tencent.com/developer/article/1165877
《OpenCV2.4.13源码分析-getGaussianKernel》
https://blog.csdn.net/u012633319/article/details/80921023