初识欧拉角与万向节死锁
定义
先引wiki上的定义
欧拉角:由三个角度组成,在特定坐标系下用于描述刚体的orientation.
简单来说,就是绕一个三维坐标系统下的三个基轴旋转三个角度,可以用来表示物体通过各种绕七绕八的转,最终转到的那种形态(orientation)。
这里的orientation我不知道该怎么翻译,指的是物体的“朝向“,但绝对不是指一个方向(direction)或者我们说的向量(vector),或许用“物体姿态“来描述orientation更好。
当你旋转一个向量时,向量是不会改变的,因为向量没有orientation这个属性

而当你旋转一个物体时,你就会改变这个物体的orientation
我个人想把orientation翻译为“旋向”,指物体旋转的方向。(雾)
表示一个方向,我们不一定要用向量,向量包含了多余的长度信息,所以最少只需要两个角度就够了(三维极坐标系)
而表示一个旋向 orientation,或者说物体姿态,用变量最少的欧拉角也需要用到三个角度
从变量个数来看, 自然的,向量与orientation不同。整整差了个维度呢。
欧拉角可以表示任意的orientation,当你在Unity里的inspector面板里调节rotation的时候,其实你也是在调节一个欧拉角(后文再提)。
希望这段文字可以讲清楚什么是orientation,并请务必搞清楚什么是orientation,让我们继续。
分类
欧拉角按旋转的坐标系分为内旋(intrinsic rotation)和外旋(extrinsic rotation)。
按旋转轴分为经典欧拉角(Proper Euler Angle)和泰特布莱恩角(Tait–Bryan angles)。
本文中我们用(φ, θ, ψ)(轴序,zyx) 来描述一个欧拉角
经典欧拉角(Proper Euler Angle)
按(z-x-z, x-y-x, y-z-y, z-y-z, x-z-x, y-x-y)轴序列旋转,即第一个旋转轴和最后一个旋转轴相同
泰特布莱恩角(Tait–Bryan angles)
按(x-y-z, y-z-x, z-x-y, x-z-y, z-y-x, y-x-z)轴序列旋转,即三个不同的轴
内旋(intrinsic rotation)
绕物体自身的坐标系object-space 旋转,举个例子,一个(φ, θ, ψ) (xyz,instrinsic)的欧拉角,指绕物体的x轴转φ后,再绕物体的y’轴(这里用y’表示这个新的y轴已经和一开始世界坐标系下的那个物体的y轴不一样了)旋转θ,最后绕z’轴旋转φ,每一次旋转都会改变下一次旋转的轴。这种情况下旋转的轴是动态(moving axis)的。
下图引自wiki,一个zxz的内旋

外旋(extrinsic rotation)
绕惯性系upright-space 旋转(upright space指基向量平行于world-space或parent-space,原点与object-space的原点重合的空间)。
也就说,无论是三步旋转中的哪一步,轴都是固定的,是不会动的。
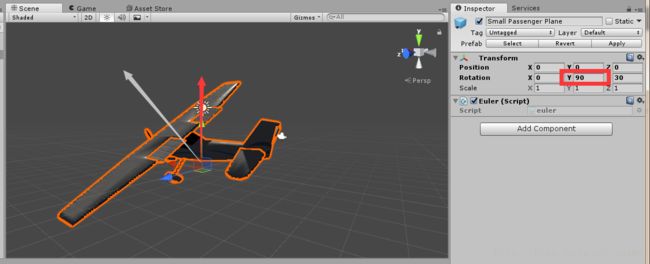
unity中的rotation就是一种外旋。
一个rotation为(0,0,30)的飞机

旋转到(0,90,0),可以看到飞机并没有沿着旋转后的y轴(灰色箭头)旋转,仍然依照世界坐标系下的y轴(红色箭头)旋转
yaw-pitch-row(heading-pitch-bank)
我们把(z,y,x 内旋(intrinsic))的这种格式称为 yaw-pitch-roll(heading-pitch-bank)
下图引自wiki,yaw pitch & orw
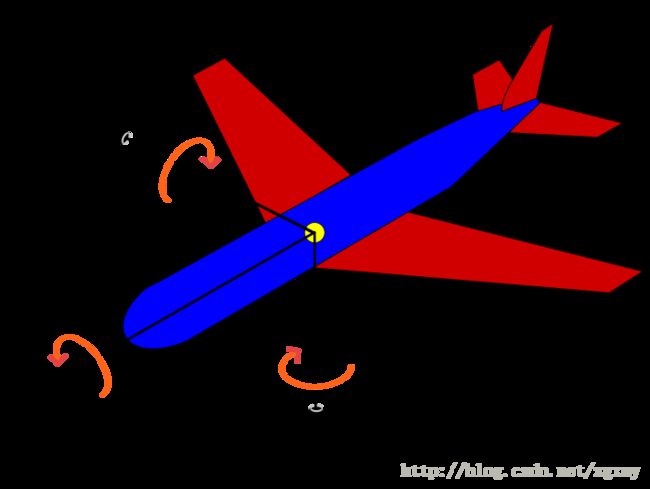
图中的绿色箭头为yaw(heading),红色箭头为pitch,蓝色箭头为row(bank)

关于unity中的欧拉角
我本来想自己写的,可惜已经有人写过了
这个帖子写的很好,看这个就行了
http://blog.csdn.net/andrewfan/article/details/60866636
关于万向节死锁(gimbal lock)
同样的,看andrewfan的这个帖子就行了,讲的挺清楚
http://blog.csdn.net/andrewfan/article/details/60981437
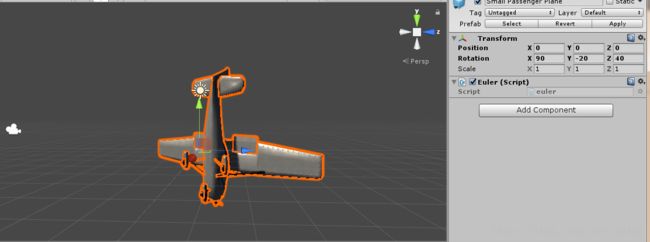
关于万向节死锁,我再赘述一下
Unity中的rotation是(φ, θ, ψ) (zxy ,外旋(extrinsic)),也就是说,当我先绕世界坐标z轴旋转40,再绕世界坐标x轴旋转90,最后绕世界坐标y轴旋转-20的结果(40,90,-20)
和先绕世界坐标z轴旋转60,再绕世界坐标x轴旋转90的结果(60,90,0)的结果是一样的
(补充一下,旋转的方向由坐标系决定,比如图中是左手系,就按左手螺旋来判定旋转方向。)
这里看到两种欧拉角旋转的结果是等价的,并且当x旋转90度时,任意的(a,90,b)都能用(a-b,90,0)来描述。此时我们称z轴失去了自由度,并称这种情况为万向节死锁
个人觉得这种现象是因为欧拉角表示一个orientation的的不唯一性引起的,这也欧拉角没办法做插值的主要原因。
具体还是看上面的帖子吧