车道线定位及拟合:直方图确定车道线位置
 日萌社
日萌社
人工智能AI:Keras PyTorch MXNet TensorFlow PaddlePaddle 深度学习实战(不定时更新)
CNN:RCNN、SPPNet、Fast RCNN、Faster RCNN、YOLO V1 V2 V3、SSD、FCN、SegNet、U-Net、DeepLab V1 V2 V3、Mask RCNN
车道线检测
相机校正、张氏标定法、极大似然估计/极大似然参数估计、牛顿法、高斯牛顿法、LM算法、sin/cos/tan/cot
相机校正和图像校正:图像去畸变
车道线提取:Sobel边缘提取算法
透视变换
车道线定位及拟合:直方图确定车道线位置
车道曲率和中心点偏离距离计算
在视频中检测车道线
5.4. 车道线定位及拟合
学习目标
- 了解直方图确定车道线位置的思想
我们根据前面检测出的车道线信息,利用直方图和滑动窗口的方法,精确定位车道线,并进行拟合。
1. 定位思想
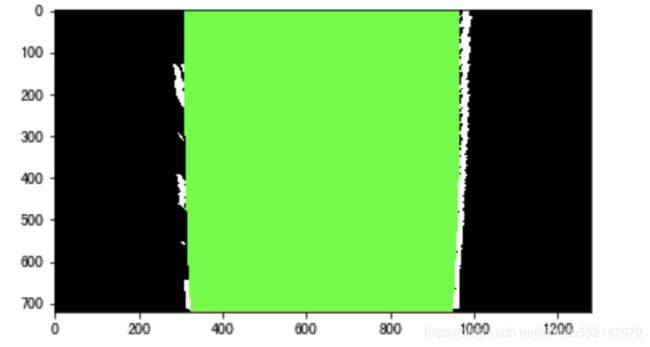
下图是我们检测到的车道线结果:

沿x轴方向统计每一列中白色像素点的个数,横坐标是图像的列数,纵坐标表示每列中白色点的数量,那么这幅图就是“直方图”,如下图所示:
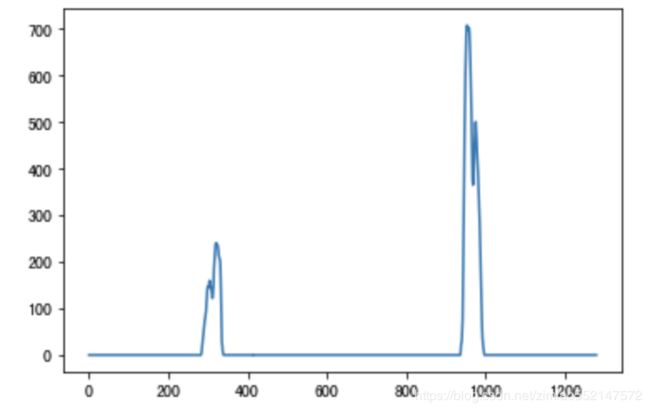
对比上述两图,可以发现直方图左半边最大值对应的列数,即为左车道线所在的位置,直方图右半边最大值对应的列数,是右车道线所在的位置。
确定左右车道线的大致位置后,使用”滑动窗口“的方法,在图中对左右车道线的点进行搜索。
滑动窗口的搜索过程:
-
设置搜索窗口大小(width和height):一般情况下width为手工设定,height为图片大小除以设置搜索窗口数目计算得到。
-
以搜寻起始点作为当前搜索的基点,并以当前基点为中心,做一个网格化搜索。

-
对每个搜索窗口分别做水平和垂直方向直方图统计,统计在搜索框区域内非零像素个数,并过滤掉非零像素数目小于50的框。
-
计算非零像素坐标的均值作为当前搜索框的中心,并对这些中心点做一个二阶的多项式拟合,得到当前搜寻对应的车道线曲线参数。
2.实现
使用直方图和滑动窗口检测车道线的代码如下:
def cal_line_param(binary_warped):
# 1.确定左右车道线的位置
# 统计直方图
histogram = np.sum(binary_warped[:, :], axis=0)
# 在统计结果中找到左右最大的点的位置,作为左右车道检测的开始点
# 将统计结果一分为二,划分为左右两个部分,分别定位峰值位置,即为两条车道的搜索位置
midpoint = np.int(histogram.shape[0] / 2)
leftx_base = np.argmax(histogram[:midpoint])
rightx_base = np.argmax(histogram[midpoint:]) + midpoint
# 2.滑动窗口检测车道线
# 设置滑动窗口的数量,计算每一个窗口的高度
nwindows = 9
window_height = np.int(binary_warped.shape[0] / nwindows)
# 获取图像中不为0的点
nonzero = binary_warped.nonzero()
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
# 车道检测的当前位置
leftx_current = leftx_base
rightx_current = rightx_base
# 设置x的检测范围,滑动窗口的宽度的一半,手动指定
margin = 100
# 设置最小像素点,阈值用于统计滑动窗口区域内的非零像素个数,小于50的窗口不对x的中心值进行更新
minpix = 50
# 用来记录搜索窗口中非零点在nonzeroy和nonzerox中的索引
left_lane_inds = []
right_lane_inds = []
# 遍历该副图像中的每一个窗口
for window in range(nwindows):
# 设置窗口的y的检测范围,因为图像是(行列),shape[0]表示y方向的结果,上面是0
win_y_low = binary_warped.shape[0] - (window + 1) * window_height
win_y_high = binary_warped.shape[0] - window * window_height
# 左车道x的范围
win_xleft_low = leftx_current - margin
win_xleft_high = leftx_current + margin
# 右车道x的范围
win_xright_low = rightx_current - margin
win_xright_high = rightx_current + margin
# 确定非零点的位置x,y是否在搜索窗口中,将在搜索窗口内的x,y的索引存入left_lane_inds和right_lane_inds中
good_left_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) &
(nonzerox >= win_xleft_low) & (nonzerox < win_xleft_high)).nonzero()[0]
good_right_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) &
(nonzerox >= win_xright_low) & (nonzerox < win_xright_high)).nonzero()[0]
left_lane_inds.append(good_left_inds)
right_lane_inds.append(good_right_inds)
# 如果获取的点的个数大于最小个数,则利用其更新滑动窗口在x轴的位置
if len(good_left_inds) > minpix:
leftx_current = np.int(np.mean(nonzerox[good_left_inds]))
if len(good_right_inds) > minpix:
rightx_current = np.int(np.mean(nonzerox[good_right_inds]))
# 将检测出的左右车道点转换为array
left_lane_inds = np.concatenate(left_lane_inds)
right_lane_inds = np.concatenate(right_lane_inds)
# 获取检测出的左右车道点在图像中的位置
leftx = nonzerox[left_lane_inds]
lefty = nonzeroy[left_lane_inds]
rightx = nonzerox[right_lane_inds]
righty = nonzeroy[right_lane_inds]
# 3.用曲线拟合检测出的点,二次多项式拟合,返回的结果是系数
left_fit = np.polyfit(lefty, leftx, 2)
right_fit = np.polyfit(righty, rightx, 2)
return left_fit, right_fit车道线的检测的拟合结果如下图所示:

其中绿色的方框是滑动窗口的结果,中间的黄线是车道线拟合的结果。
下面我们将车道区域绘制处理,即在检测出的车道线中间绘制多边形,代码如下:
def fill_lane_poly(img, left_fit, right_fit):
# 获取图像的行数
y_max = img.shape[0]
# 设置输出图像的大小,并将白色位置设为255
out_img = np.dstack((img, img, img)) * 255
# 在拟合曲线中获取左右车道线的像素位置
left_points = [[left_fit[0] * y ** 2 + left_fit[1] * y + left_fit[2], y] for y in range(y_max)]
right_points = [[right_fit[0] * y ** 2 + right_fit[1] * y + right_fit[2], y] for y in range(y_max - 1, -1, -1)]
# 将左右车道的像素点进行合并
line_points = np.vstack((left_points, right_points))
# 根据左右车道线的像素位置绘制多边形
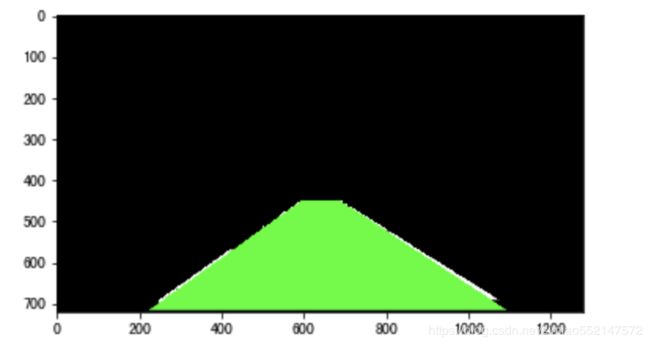
cv2.fillPoly(out_img, np.int_([line_points]), (0, 255, 0))
return out_img效果如下图所示:
其中两个方法给大家介绍下:
np.vstack:按垂直方向(行顺序)堆叠数组构成一个新的数组
np.dstack:按水平方向(列顺序)堆叠数组构成一个新的数组
示例如下:

将检测出的车道逆投影到原始图像,直接调用透视变换的方法即可:
transform_img_inverse = img_perspect_transform(result, M_inverse)
效果如下图所示:
最后将其叠加在原图像上,则有:

总结:
知道车道线精确定位的思想:
首先利用直方图的方法确定左右车道线的位置,然后利用滑动窗口的方法,搜索车道线位置,并进行拟合,然后绘制车道区域,并进行反投影,得到原始图像中的车道区域。